
1. Introducción
En los sistemas aéreos no tripulados (UAS) contemporáneos, la batería ya no es un simple depósito pasivo de energía, sino un subsistema ciberfísico altamente integrado. Las baterías inteligentes modernas incorporan microcontroladores, circuitos de protección multicapa y algoritmos de diagnóstico en tiempo real que regulan conjuntamente el flujo de energía y garantizan la seguridad operativa. Sin embargo, el aumento de inteligencia también introduce nuevos modos de fallo. Bajo ciertas condiciones anormales —como bloqueos del firmware, lecturas erróneas de los sensores o bloqueos protectores— la batería puede volverse inoperante.
En estos escenarios, el botón de encendido funciona como una interfaz crítica para iniciar un restablecimiento forzado, un procedimiento que obliga al Sistema de Gestión de Baterías (BMS) interno a reinicializarse. Este artículo ofrece un análisis de estilo académico de los mecanismos, la fundamentación y las consideraciones operativas relacionadas con los restablecimientos forzados basados en el botón de encendido, haciendo especial hincapié en su aplicabilidad en las arquitecturas habituales de baterías inteligentes.
2. Arquitectura de las baterías inteligentes para drones
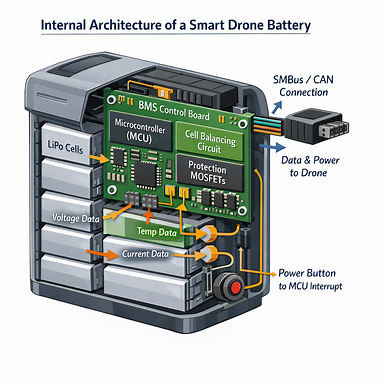
Las baterías inteligentes integran componentes eléctricos, computacionales y de control de seguridad en un módulo unificado. Su arquitectura interna incluye típicamente:
● Microcontrolador de Gestión de Batería (MCU)
Ejecuta rutinas de firmware, supervisa los estados del sistema y gestiona la comunicación con el dron.
● Circuitos de monitorización y equilibrado de celdas
Mantienen la uniformidad de tensión entre las celdas para evitar su degradación prematura.
● MOSFETs de protección y sus drivers de compuerta
Proporcionan protección contra sobrecorriente, sobrecarga y cortocircuitos.
● Red de sensores de temperatura
Garantiza la estabilidad térmica durante la carga y la descarga.
● Algoritmos de Estado de Carga (SOC) y Estado de Salud (SOH)
Estiman la capacidad restante y el estado a largo plazo de la batería.
Dado que estos componentes funcionan bajo control de firmware, fallos lógicos transitorios o bloqueos protectivos pueden provocar que el sistema se bloquee. Un reinicio forzado mediante el botón de encendido/reinicio reinicia la unidad de control microprogramable (MCU) y borra los estados de error volátiles.
3. Condiciones que desencadenan la necesidad de un reinicio forzado
Normalmente se requiere un reinicio forzado cuando el sistema de gestión de baterías (BMS) entra en un estado anómalo o protector. Los desencadenantes más comunes incluyen:
3.1 Bloqueos en la ejecución del firmware
Interrupciones inesperadas en las rutinas de firmware pueden hacer que la MCU deje de responder a las entradas del usuario o a las señales del cargador.
3.2 Alarmas protectivas falsas
El ruido, las caídas transitorias de tensión o anomalías en los sensores pueden activar incorrectamente las protecciones contra sobrecorriente o sobrecalentamiento.
3.3 Modo de sueño profundo o bloqueo por bajo voltaje
Cuando el voltaje de la celda se acerca a umbrales críticos, el sistema de gestión de baterías (BMS) puede desactivar la activación normal para evitar daños.
3.4 Fallos de comunicación con el dron
El controlador de vuelo puede informar errores como «Fallo de comunicación de la batería» o «Paquete de datos inconsistente», lo que indica un mal funcionamiento del BMS.
3.5 Inestabilidad tras una actualización
Si una actualización de firmware se interrumpe, la batería puede quedar bloqueada en un estado indefinido.
En estos casos, el botón de encendido constituye el único mecanismo externo capaz de forzar un reinicio a nivel de sistema.
4. Mecanismo de reinicio forzado mediante el botón de encendido
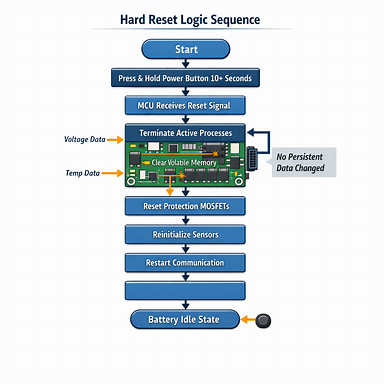
El botón de encendido está conectado a la unidad de control microprogramable (MCU) mediante un circuito de interrupción o de activación (wake-line). Durante el funcionamiento normal, las pulsaciones cortas o largas activan rutinas predefinidas en el firmware. Sin embargo, si se mantiene pulsado durante un período prolongado (típicamente entre 8 y 15 segundos), el botón inicia una secuencia forzada de apagado y reinicio.
Las acciones internas durante un reinicio forzado incluyen:
● Terminación de todos los hilos de firmware activos
● Borradura de los registros de memoria volátil
● Reinicio de los estados de las compuertas de los MOSFET de protección
● Vuelta a inicializar el muestreo del ADC para tensión y temperatura
● Reinicio de los protocolos de comunicación (por ejemplo, SMBus, CAN, UART)
Este proceso no modifica los datos persistentes, como el número de ciclos, las tablas de calibración o las métricas de SOH.
5. Procedimiento generalizado de reinicio forzado
Aunque las implementaciones específicas varían entre fabricantes, el siguiente procedimiento es ampliamente aplicable:
1. Retire la batería de la aeronave para evitar una entrega de energía no intencionada.
2. Inspeccione la batería en busca de hinchazón, fugas o anomalías térmicas.
3. Presione y mantenga pulsado el botón de encendido durante 10–15 segundos hasta que todos los LED se apaguen o parpadeen brevemente.
4. Suelte el botón y espere de 5 a 10 segundos para que se reinicie internamente.
5. Realice una secuencia estándar de encendido (pulsación breve + pulsación larga).
6. Vuelva a conectar el dispositivo al cargador para verificar si se reanuda el comportamiento normal de carga.
Este procedimiento restaura la funcionalidad en muchos casos que implican fallos lógicos temporales.
6. Limitaciones del restablecimiento forzado
Un restablecimiento forzado no puede resolver problemas originados en:
● Células descargadas severamente por debajo del umbral de recuperación del BMS
● Daños físicos, como perforaciones o hinchazón de las células
● Degradación térmica de los componentes internos
● Corrupción permanente del firmware
● Pérdida de capacidad relacionada con el envejecimiento
Por lo tanto, el restablecimiento debe considerarse una herramienta de diagnóstico y recuperación, no un método de reparación universal.
7. Consideraciones de seguridad
Antes de realizar un restablecimiento, los operadores deben asegurarse de lo siguiente:
● La batería se encuentra a temperatura ambiente
● No presenta deformación ni fugas
● La batería no ha estado involucrada recientemente en un accidente
● El procedimiento se lleva a cabo lejos de materiales inflamables
Estas precauciones reducen los riesgos asociados con celdas de litio comprometidas.
8. Prácticas preventivas para reducir la frecuencia de reinicios
Para minimizar las anomalías del BMS, los usuarios deben adoptar las siguientes prácticas:
● Mantener la carga de almacenamiento entre el 40 % y el 60 %
● Evitar descargar por debajo del 20 % durante los vuelos habituales
● Utilizar cargadores aprobados por el fabricante
● Conservar las baterías dentro de los rangos de temperatura recomendados
● Actualizar el firmware únicamente con una fuente de alimentación estable y condiciones adecuadas de señal
● Evitar el almacenamiento prolongado con carga completa
Estas medidas reducen la tensión tanto sobre las celdas como sobre el firmware del BMS.
9. Conclusión
El botón de encendido/apagado de una batería inteligente para drones constituye una interfaz crítica para iniciar un reinicio forzado, lo que permite al BMS recuperarse de fallos transitorios, errores de comunicación y bloqueos del firmware. Aunque el procedimiento de reinicio es sencillo desde la perspectiva del usuario, desencadena una sofisticada secuencia interna de reinicialización que restaura la estabilidad operativa sin modificar los datos a largo plazo de la batería.
Comprender los mecanismos subyacentes, las limitaciones y las consideraciones de seguridad permite a los operadores utilizar esta función de forma eficaz y mantener un rendimiento fiable del dron. A medida que la tecnología de baterías inteligentes siga evolucionando, los mecanismos de reinicio podrían volverse más automatizados, pero el botón de encendido seguirá siendo una herramienta fundamental para la recuperación del sistema.
