
1. Johdanto
Nykyisissä lentävissä ilmajärjestelmissä (UAS) akku ei enää ole passiivinen energiavarasto vaan erinomainen kyberfyysinen alajärjestelmä. Nykyaikaiset älykkäät akut sisältävät mikro-ohjaimia, monitasoisia suojapiirejä ja reaaliaikaisia diagnostiikkalgoritmejä, jotka yhdessä säätelevät energian virtausta ja varmistavat käyttöturvallisuuden. Kuitenkin lisääntyvä älykkyys tuo mukanaan myös uusia vikatiloja. Tietyissä poikkeavissa olosuhteissa – kuten ohjelmiston jumiutuessa, anturien väärin lukemissa tai suojauslukituksissa – akku voi tulla vastauksettomaksi.
Näissä skenaarioissa virtanappi toimii kriittisenä käyttöliittymänä kovaa nollauksetta varten, mikä pakottaa sisäisen akkujen hallintajärjestelmän (BMS) uudelleenkäynnistymään. Tässä artikkelissa tarkastellaan akkujen hallintajärjestelmiin perustuvia kovia nollauksia akun virtanapin avulla akateemisessa tyyliin, keskittyen niiden toimintamekanismeihin, perusteluihin ja käytännön näkökohtiin sekä erityisesti niiden soveltuvuuteen yleisimpiin älykkäiden akkujen arkkitehtuureihin.
2. Älykkäiden dronien akkujen arkkitehtuuri
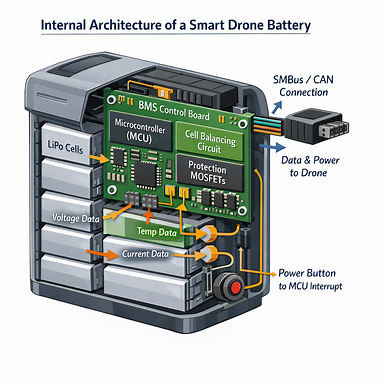
Älykkäät akut integroivat sähköiset, laskennalliset ja turvallisuuden ohjauskomponentit yhdeksi yhtenäiseksi moduuliksi. Niiden sisäinen arkkitehtuuri sisältää tyypillisesti:
● Akkujen hallintamikro-ohjain (MCU)
Suorittaa firmware-toteutettuja toimintoja, seuraa järjestelmän tiloja ja hallinnoi viestintää dronin kanssa.
● Kennojen seuranta- ja tasauspiirit
Säilyttävät jännitetasapainon kennojen välillä estääkseen ennenaikaisen vanhenemisen.
● Suojamosfetit ja porttipajot
Tarjoavat ylikuormitussuojan, ylikorotussuojan ja oikosulkusuojan.
● Lämpötilanseurantaverkko
Takuu lämpötilan vakautta ladattaessa ja purkattaessa.
● Lataustilan (SOC) ja terveydentilan (SOH) algoritmit
Arvioi jäljellä olevaa kapasiteettia ja akun pitkäaikaista kuntoa.
Koska nämä komponentit toimivat ohjelmistohallinnan alla, hetkelliset logiikkavirheet tai suojalukitukset voivat aiheuttaa järjestelmän jäämisen paikalleen. Painikkeen kautta tehtävä pakotettu nollaus käynnistää mikro-ohjausyksikön uudelleen ja poistaa tilapäiset virhetilanteet.
3. Olosuhteet, jotka edellyttävät pakotettua nollausta
Pakotettu nollaus vaaditaan yleensä silloin, kun akkujen hallintajärjestelmä (BMS) siirtyy epänormaaliin tai suojatilaan. Tyypillisiä laukaisimia ovat:
3.1 Ohjelmiston suorituksen pysähtyminen
Ohjelmiston toimintojen odottamattomat keskeytykset voivat saada mikro-ohjausyksikön lopettamaan vastaukset käyttäjän syötteisiin tai laturin signaaleihin.
3.2 Virheelliset suojamerkintätiedot
Kohina, hetkelliset jännitepudotukset tai anturien poikkeamat voivat aiheuttaa virheellisesti liian suuren virran tai liian korkean lämpötilan suojatoimet.
3.3 Syväunen tai alajännite-lukitus
Kun solujännite lähestyy kriittisiä rajoja, BMS voi poistaa normaalit aktivointitoiminnot vaurioiden estämiseksi.
3.4 Viestintävirheet droneen
Lentokontrolleri voi ilmoittaa virheistä, kuten "Akkuviestintävirhe" tai "Epäyhtenäinen tietopaketti", mikä viittaa BMS:n vikaantumiseen.
3.5 Päivityksen jälkeinen epävakaus
Jos ohjelmistopäivitys keskeytyy, akku saattaa jäämässä määrittelemättömään tilaan.
Näissä tapauksissa virtanappi toimii ainoana ulkoisena mekanismina, joka pystyy pakottamaan järjestelmätason uudelleenkäynnistyksen.
4. Virtanapin perustuva kovauudelleenkäynnistysmekanismi
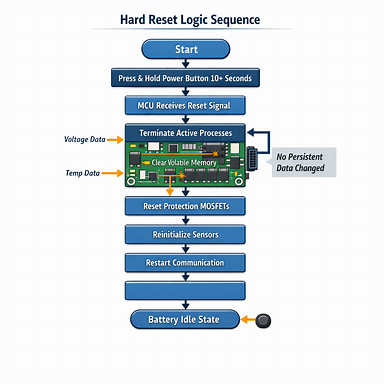
Virtanappi on kytketty mikro-ohjausyksikköön (MCU) keskeytys- tai herätyslinjan kautta. Normaalissa toiminnassa lyhyet tai pitkät painallukset käynnistävät ennalta määritellyt ohjelmistorutiinit. Kun nappia kuitenkin pidetään painettuna pidempään aikaan (yleensä 8–15 sekuntia), se käynnistää pakotetun sammutus- ja uudelleenkäynnistyssekvenssin.
Kovauudelleenkäynnistyksen aikana suoritettavat sisäiset toimet ovat:
● Kaikkien aktiivisten firmware-tehtävien päättäminen
● Haihtuvan muistin rekisterien tyhjentäminen
● Suojamosfet-kytkinten tilojen nollaaminen
● Jännitteen ja lämpötilan ADC-näytteistysten uudelleenkäynnistäminen
● Viestintäprotokollien (esim. SMBus, CAN, UART) uudelleenkäynnistäminen
Tämä prosessi ei muuta pysyviä tietoja, kuten kierroslukumäärää, kalibrointitaulukoita tai SOH-mittareita.
5. Yleistetty kovaresetointiproseduuri
Vaikka tarkat toteutukset vaihtelevat valmistajakohtaisesti, seuraava menettely on laajalti sovellettavissa:
1. Irrota akku lentokoneesta estääksesi tahattoman virran toimittamisen.
2. Tarkista akku turvallisuuden varmistamiseksi turvotuksesta, vuodosta tai lämpötilan poikkeamista.
3. Paina ja pidä virtanäppäintä painettuna 10–15 sekuntia, kunnes kaikki LED-valot sammuvat tai vilkkuvat lyhyesti.
4. Vapauta näppäin ja anna 5–10 sekuntia sisäisen uudelleenkäynnistyksen tapahtua.
5. Suorita normaali virtaan kytkemisjärjestelmä (lyhyt painallus + pitkä painallus).
6. Kytke laite uudelleen laturiin ja tarkista, palautuuko normaali latauskäyttäytyminen.
Tämä menettely palauttaa toiminnallisuuden monissa tapauksissa, joissa on kyse tilapäisistä logiikkavioista.
6. Kovaresetoinnin rajoitukset
Kovaresetointi ei voi korjata seuraavista syistä johtuvia ongelmia:
● Liian voimakkaasti purkautuneet kennot, joiden jännite on alittanut BMS:n palautusrajan
● Fyysinen vaurio, kuten läpikuormitukset tai turvonneet kennot
● Sisäisten komponenttien lämpövaurio
● Pysyvä firmwareen liittyvä vika
● Ikääntymiseen liittyvä kapasiteetin menetys
Siksi nollaus tulisi nähdä diagnoosina ja palautustyökaluna, ei yleisenä korjausmenetelmänä.
7. Turvallisuusnäkökohdat
Ennen nollausta operaattorien on varmistettava seuraavat asiat:
● Akku on huoneenlämmössä
● Akussa ei ole muodonmuutoksia tai vuotoja
● Akku ei ole ollut äskettäin mukana törmäyksessä
● Menettely suoritetaan syttyvien materiaalien ulkopuolella
Nämä varotoimet vähentävät riskejä, jotka liittyvät vaurioituneisiin litiumpohjaisiin kennoihin.
8. Ennakoivat käytännöt nollauksien taajuuden vähentämiseksi
BMS:n poikkeamien minimoimiseksi käyttäjien tulisi noudattaa seuraavia käytäntöjä:
● Säilytä varausaste 40–60 %:n välillä
● Vältä purkamista alle 20 %:iin tavallisilla lennoilla
● Käytä valmistajan hyväksymiä laturteja
● Pidä akut suositeltujen lämpötila-alueiden sisällä
● Päivitä firmware vain vakaita virta- ja signaaliolettoja käyttäen
● Vältä pitkäaikaista säilytystä täysin ladattuna
Nämä toimet vähentävät sekä kennojen että BMS:n firmwaren kuormitusta.
9. Lopetus
Älykkään dronin akun virtanappi toimii kriittisenä käyttöliittymänä kovaa nollauksia käynnistettäessä, mikä mahdollistaa BMS:n toipumisen tilapäisistä vioista, viestintävirheistä ja firmwaren jumiutumisesta. Vaikka nollausmenettely on käyttäjän näkökulmasta yksinkertainen, se käynnistää monitasoisen sisäisen uudelleenkäynnistyssekvenssin, joka palauttaa toiminnallisen vakauden muuttamatta akun pitkäaikaista tietoa.
Ymmärtämällä perusmekanismit, rajoitukset ja turvallisuusnäkökohdat käyttäjät voivat käyttää tätä toimintoa tehokkaasti ja pitää lennokin suorituskyvyn luotettavana. Kun älykkäiden akkujen teknologia kehittyy edelleen, nollausmekanismit saattavat automatisoitua entisestään, mutta virtapainike säilyy perustavanlaatuisena työkaluna järjestelmän palauttamiseen.
