
1. Kirish
Zamonaviy parvoz qilmas uchish apparatlari (PQU) tizimlarida batareya endi passiv energiya ombori emas, balki juda integratsiyalangan kiber-fizik podtizimdir. Zamonaviy aqlli batareyalar energiya oqimini tartibga solish va operatsion xavfsizlikni ta'minlash uchun birgalikda ishlaydigan mikrokontrollerlar, ko'p qatlamli himoya tizimlari va haqiqiy vaqtda diagnostika algoritmlarini o'z ichiga oladi. Biroq, aqlli qilishning oshishi yangi nosozlik rejimlarini ham keltirib chiqaradi. Ba'zi noodatiy sharoitlarda — masalan, dasturiy ta'minot to'xtab qolishi, sensorlarning noto'g'ri o'qishlari yoki himoya bloklovchilari — batareya javob bermas holatga kelishi mumkin.
Bu vaziyatlarda quvvat tugmasi qattiq qayta ishga tushirishni boshlash uchun muhim interfeys sifatida ishlaydi — bu jarayon ichki Akkumulyator Boshqaruvi Tizimini (BMS) qaytadan ishga tushirishni majbur qiladi. Ushbu maqola quvvat tugmasi orqali amalga oshiriladigan qattiq qayta ishga tushirishning mexanizmlari, asoslari va operatsion jihatlarini akademik uslubda ko'rib chiqadi va bu jarayonning keng tarqalgan aqlli akkumulyator arxitekturalariga qo'llanilishi ahamiyatiga alohida e'tibor beriladi.
aqlli dron akkumulyatorlarining arxitekturasi
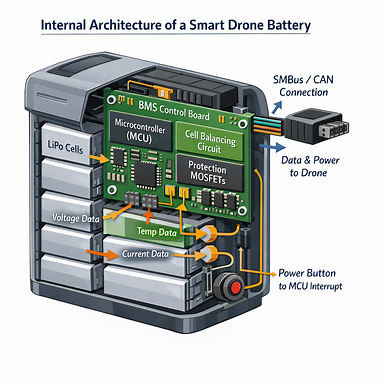
Aqlli akkumulyatorlar elektr, hisoblash va xavfsizlikni boshqarish komponentlarini bitta birlashgan modulga birlashtiradi. Ularning ichki arxitekturasi odatda quyidagilardan iborat:
● Akkumulyator boshqaruvi mikrokontrolleri (MCU)
Dasturiy ta'minot protseduralarini bajaradi, tizim holatlarini kuzatib boradi va dron bilan aloqani boshqaradi.
● Elementlarni kuzatish va muvozanatlash sxemalari
Elementlarning tez-tez ishlashi oldini olish uchun elementlar bo'ylab kuchlanish bir xilligini saqlaydi.
● Xavfsizlik MOSFETlari va darvozalar boshqaruvchilari
Oshiq tok, ortiqcha zaryadlanish va qisqa tutashuvdan himoya qiladi.
● Haroratni kuzatish tarmog'i
Zaryadlash va razryadlash jarayonida issiqlik barqarorligini ta'minlaydi.
● Zaryad holati (SOC) va Sog'liq holati (SOH) algoritmlari
Qolgan quvvat sig'imi va batareyaning uzoq muddatli holatini baholash.
Chunki bu komponentlar firmware nazorati ostida ishlaydi, shuning uchun o'tishdagi mantiqiy nuqsonlar yoki himoya qiluvchi bloklovlar tizimning to'xtab qolishiga sabab bo'lishi mumkin. Quvvat tugmasi orqali qattiq qayta ishga tushirish mikrokontroller (MCU) ni qayta ishga tushiradi va o'zgaruvchan xatolik holatlarini tozalaydi.
3. Qattiq qayta ishga tushirishni talab qiladigan sharoitlar
BMS noodatiy yoki himoya holatiga kirganda odatda qattiq qayta ishga tushirish talab qilinadi. Eng ko'p uchraydigan sabablar quyidagilardir:
3.1 Firmware bajarilishining to'xtashi
Firmware protseduralaridagi kutilmagan uzilishlar MCU ni foydalanuvchi kiritishi yoki zaryadlovchi signallariga javob bermaslikka sabab bo'lishi mumkin.
3.2 Noto'g'ri himoya flaglari
Shovqin, o'tishdagi kuchlanish pasayishi yoki sensorlarning noodatiy ishlashi o'tkazilayotgan tok yoki temperaturaga oid himoya funksiyalarini noto'g'ri faollashtirishiga sabab bo'lishi mumkin.
3.3 Chuqur uxlash yoki past kuchlanishda qulflanish
Agar hujayra kuchlanishi muhim chegaralarga yaqinlashsa, BMS normal faollashtirishni o'chirib qo'yadi va shu tariqa zararni oldini oladi.
3.4 Drone bilan aloqa uzilishi
Parvoz boshqaruvchisi "Batareya bilan aloqa nosozligi" yoki "Ma'lumot paketlari mos kelmasligi" kabi xatoliklarni bildirishi mumkin, bu esa BMS ishlamayotganligini ko'rsatadi.
3.5 Yangilashdan keyingi nobarqarorlik
Agar dasturiy ta'minot yangilash jarayoni uzilgan bo'lsa, batareya aniqlanmagan holatda qulflanishi mumkin.
Bu hollarda quvvat tugmasi tizim darajasidagi qayta ishga tushirishni majburiy ravishda amalga oshirishning yagona tashqi vositasi hisoblanadi.
4. Quvvat tugmasi asosidagi qattiq qayta ishga tushirish mexanizmi
Quvvat tugmasi MCU ga kesishish yoki uyg'otish chizig'i orqali ulangan. Oddiy ishlash rejimida qisqa yoki uzoq bosishlar oldindan belgilangan dasturiy ta'minot protseduralarini ishga tushiradi. Biroq, tugma uzun muddat (odatda 8–15 soniya) bosib turilsa, majburiy o'chirish va qayta ishga tushirish ketma-ketligi boshlanadi.
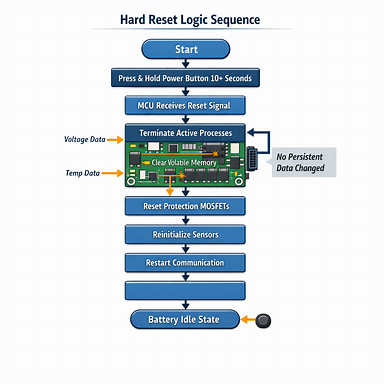
Qattiq qayta ishga tushirish paytida ichki amallar quyidagilardan iborat:
● Barcha faol firmware oqimlarining tugashi
● Volatil xotira registratsiyalarining tozalanishi
● Himoya MOSFET darvozalarining holatlarini qayta sozlash
● Kuchlanish va harorat uchun ADC namunalashini qayta boshlash
● Aloqa protokollari (masalan, SMBus, CAN, UART) qayta ishga tushiriladi
Bu jarayon sikl hisobi, kalibratsiya jadvallari yoki SOH ko'rsatkichlari kabi doimiy ma'lumotlarga o'zgartirish kiritmaydi.
5. Umumlashtirilgan qattiq qayta ishga tushirish protsedurasi
Ishlab chiqaruvchilarga qarab aniq amalga oshirish usullari farq qilsa ham, quyidagi protsedura keng qo'llaniladi:
1. Noqulay quvvat yetkazib berilishini oldini olish uchun akkumulyatorni samolyotdan olib tashlang.
2. Akkumulyatorni shishish, sivish yoki issiqlik nuqtasida no normal holatlarga tekshiring.
3. Barcha LED chiroqlari o‘chib ketguncha yoki qisqa vaqt davomida chaynab boshlanguncha quvvat tugmasini 10–15 soniya davomida bosib tuting.
4. Tugmani qo‘ying va ichki qayta ishga tushirish uchun 5–10 soniya kutib turing.
5. Standart yoqish ketma-ketligini bajaring (qisqa bosish + uzun bosish).
6. Oddiy zaryadlanish rejimi tiklanganligini tekshirish uchun zaryadlovchiga qaytadan ulaning.
Bu jarayon ko‘pincha vaqtinchalik mantiqiy nuqsonlar bilan bog‘liq muammolarni hal qiladi.
6. Qattiq qayta ishga tushirishning cheklovlari
Qattiq qayta ishga tushirish quyidagilarga sabab bo‘lgan muammolarni hal qila olmaydi:
● BMS tiklanish chegarasidan past darajada juda kuchli zaryadlanmagan elementlar
● Pochinaklar yoki shishgan elementlar kabi jismoniy shikastlanishlar
● Ichki komponentlarning issiqlikdan buzilishi
● Doimiy firmware buzilishi
● Yoshga bog'liq quvvat yo'qotishi
Shu sababli, qayta sozlashni universal ta'mirlash usuli emas, balki diagnostika va tiklash vositasi sifatida ko'rish kerak.
7. Xavfsizlik jihatlariga e'tibor berish
Qayta sozlashni amalga oshirishdan oldin operatorlar quyidagilarga ishonch hosil qilishlari kerak:
● Akkumulyator atrof-muhit haroratida bo'lishi
● Shikastlanish yoki sivishning mavjud emasligi
● Akkumulyator oxirgi vaqtlarda avtohalokatda qatnashmaganligi
● Jarayon yonuvchan moddalardan uzoqda o'tkazilayotgani
Bu ehtiyot choralar lithium asosidagi hujayralarning buzilishi bilan bog'liq xavflarni kamaytiradi.
8. Qayta sozlash chastotasini kamaytirish uchun oldini olish choralari
BMS xatoliklarini minimal darajada saqlash uchun foydalanuvchilar quyidagi choralarni ko‘rishlari kerak:
● Saqlash paytida zaryad darajasini 40–60% oralig‘ida saqlang
● Oddiy parvozlar paytida zaryadni 20% dan pastga tushirmang
● Ishlab chiqaruvchi tomonidan tasdiqlangan zaryad qurilmalaridan foydalaning
● Akkumulyatorlarni tavsiya etilgan harorat oralig‘ida saqlang
● Firmware yangilashni faqat barqaror elektr ta’minoti va signali bo‘lganda amalga oshiring
● To‘liq zaryadlangan holda uzoq muddat saqlamang
Bu choralalar akkumulyator elementlari hamda BMS firmware’iga qo‘yiladigan yukni kamaytiradi.
9. Xulosa
Aqlli dron akkumulyatorining quvvat tugmasi qattiq qayta sozlashni boshlash uchun muhim interfeys vazifasini bajaradi; bu esa BMS-ni o‘tuvchi nosozliklardan, aloqa uzilishlaridan va firmware to‘xtab qolishidan tiklash imkonini beradi. Qayta sozlash protsedurasi foydalanuvchi uchun oddiy bo‘lsa-da, u ichki qismda operatsion barqarorlikni tiklaydigan murakkab qayta boshlash ketma-ketligini ishga tushiradi va uzoq muddatli akkumulyator ma'lumotlarini o'zgartirmaydi.
Asosiy mexanizmlarni, cheklovlarni va xavfsizlikka oid jihatlarni tushunish operatorlarga ushbu funksiyadan samarali foydalanishga va dron ishlashining ishonchliligini saqlashga imkon beradi. Aqlli batareyalar texnologiyasi rivojlanib borishi bilan qayta sozlash mexanizmlari yanada avtomatlashtirilishi mumkin, lekin tizimni tiklash uchun quvvat tugmasi asosiy vosita sifatida qolaveradi.
