
Absztrakt
Az energiatárolás továbbra is a fő szűk keresztmetszet az önálló repülő rendszerek (UAS) teljesítménytartományában. Bár jelentős előrelépés történt az aerószerkezeti optimalizálásban, az autonóm navigációban és a könnyű, kompozit anyagokban, a jelenlegi akkumulátortechnológiák elektrokémiai korlátai továbbra is korlátozzák a repülési időtartamot és az üzemeltetés folytonosságát. Ez a cikk tudományos elemzést nyújt a drónok akkumulátorainak teljesítményéről, különös hangsúlyt fektetve a repülési időtartamra, a töltési dinamikára, a degradációs útvonalakra és a környezeti függőségekre. Az elektrokémia, a légi- és űrmérnöki tudományok, valamint a rendszeroptimalizálás fogalmainak integrálásával a megbeszélés célja egy elméleti alap megteremtése a UAS-energiarendszerek korlátainak és jövőbeli fejlődési irányainak megértéséhez.
1. Bevezetés
A drónok (UAS) alkalmazásainak gyors kiterjesztése – a precíziós mezőgazdaságtól és a földtudományos felmérésektől a vészhelyzeti beavatkozáson át az ökológiai megfigyelésig – jelentősen megnövelte a megbízható fedélzeti energiaellátó rendszerek iránti igényt. Ellentétben az embervezérelt repülőgépekkel, amelyek nagy energiasűrűségű üzemanyagokat használhatnak, az elektromos drónok alapvetően a telepített akkumulátorok fajlagos energiatartalmára és teljesítményjellemzőire korlátozódnak. Ennélfogva egy drón üzemideje nem csupán a légihajó szerkezeti kialakításán vagy a hajtáslánc hatékonyságán múlik, hanem szorosan összefügg az energia tárolására szolgáló elektrokémiai rendszer működésével.
Az akadémiai érdeklődés a drónok (UAS) akkumulátorainak teljesítménye iránt jelentősen megnőtt, elsősorban az energiafogyasztási modellek kvantifikálása, a kopás előrejelzése, valamint hibrid vagy új generációs tárolórendszerek fejlesztése iránti igényből fakadóan. Ez a cikk összefoglalja a jelenlegi ismereteket, és szigorú, alapos elemzést nyújt a repülési és töltési időtartamokról a drónok (UAS) energiaellátó rendszereinek tervezésének szélesebb körű kontextusában.
2. Akkumulátor-kémiai összetételek a légi távirányítású rendszerekben: Elektrokémiai alapok
2.1 Lítium-polimer (LiPo) rendszerek
A LiPo akkumulátorok uralkodnak a többtengelyes légi távirányítású rendszerekben (UAS) magas fajlagos teljesítményük és a nagy kisütési áramok hosszabb ideig történő biztosításának képességük miatt. Polimer elektrolituk architektúrája csökkenti a tömegüket, és rugalmas formátumokat tesz lehetővé, ami előnyös a kompakt légiforgalmi szerkezetek számára.
Elektrokémiai szempontból a LiPo elemek a következő tulajdonságokat mutatják:
● Magas C-arány-tűrés , lehetővé téve a gyors áramkivételt súlyos feszültségesés nélkül
● Alacsony belső impedancia , javítva a reakcióidőt a tolóerő-beállítások során
●Magas tömegre vonatkoztatott teljesítménysűrűség , elengedhetetlen a tolóerő-igényes többtengelyes platformok számára
Azonban a LiPo rendszerek érzékenyek az elektrolit lebomlására, dendritképződésre és hőmérsékleti instabilitásra. Ezek a degradációs útvonalak csökkentik a ciklusélettartamot, és szigorú követelményeket támasztanak a töltési és tárolási protokollokkal szemben.
2.2 Lítium-ion (Li-ion) rendszerek
A lítium-ion akkumulátorok – különösen az NMC vagy NCA kémiai összetételt alkalmazók – magasabb fajlagos energiatartalmat és javított ciklusstabilitást nyújtanak. Az elektrokémiai stabilitásuk miatt alkalmasak rögzített szárnyú UAV-okra és hosszú távú küldetésekre, ahol a folyamatos teljesítmény – nem pedig a csúcsteljesítmény – a fő követelmény.
Fő előnyök:
● Kiváló Energia-sűrűség , lehetővé téve a hosszabb küldetési időtartamot
●Alacsonyabb önkisülés , ami előnyös a megszakított üzemelés esetén
●Javított szerkezeti merevség , csökkentve a mechanikai meghibásodás kockázatát
Az alacsonyabb csúcstelepítési képességük azonban korlátozza alkalmazhatóságukat nagy tolóerőt vagy erősen dinamikus repülési üzemmódokat igénylő feladatoknál.
3. Repülési időtartam: Többváltozós energiafogyasztási modell
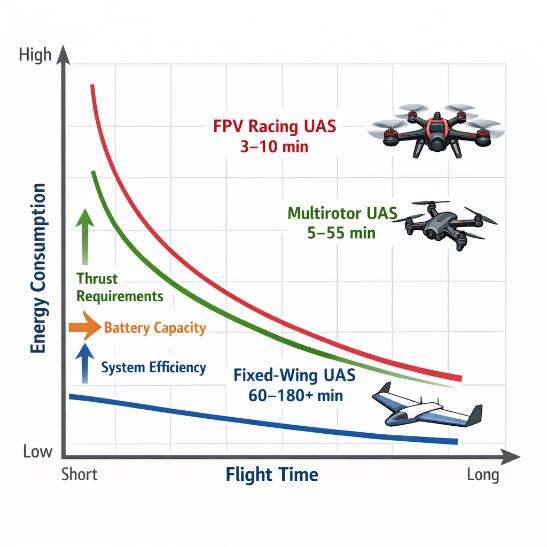
A távvezérelt repülőeszközök (UAS) repülési időtartama egy összetett kölcsönhatás eredménye az aerodinamikai, mechanikai és elektrokémiai változók között. Az akadémiai modellek általában a repülési időtartamot a tolóerő-igények, az akkumulátor kapacitása és a rendszer hatásfoka függvényében fejezik ki.
3.1 Többrotoros platformok
A többrotoros UAS-ok folyamatos tolóerőt igényelnek a felhajtóerő fenntartásához, ami magas teljesítményfelvételt eredményez. A tipikus repülési időtartam-tartományok a következők:
● Mikro-UAS-ok: 5–15 perc
● Fogyasztói UAS-ok: 20–40 perc
● Professionális UAS-ok: 30–55 perc
A repülési időtartam felső határa alapvetően a tolóerő és a teljesítményigény közötti kvadratikus kapcsolattól függ.
3.2 Rögzített szárnyú platformok
A rögzített szárnyú UAS-ok aerodinamikailag érik el a felhajtóerőt, ami jelentősen csökkenti a teljesítményfelvételt. A repülési időtartam általában 60 és 180+ perc között mozog, a szárnyterheléstől, a hajtáslánc hatásfokától és az akkumulátor kapacitástól függően.
3.3 Nagy teljesítményű FPV-rendszerek
Az FPV versenydrónok rendkívül magas kisütési arányt mutatnak, gyakran meghaladva az 50–100 C értéket, amely 3–10 perces repülési időt eredményez. Ezek a platformok a pillanatnyi teljesítményt részesítik előnyben az üzemidővel szemben, így ideális esettanulmányok a nagy terhelés alatt álló akkumulátorok viselkedésére.
4. A repülési üzemidő meghatározó tényezői: műszaki elemzés

4.1 Aerodinamikai és mechanikai terhelés
A hasznos teher tömege növeli a szükséges tolóerőt, míg a hasznos teher geometriája befolyásolja a légellenállási tényezőt. Mindkét tényező közvetlenül növeli az energiafogyasztást.
4.2 Környezeti függőségek
A környezeti feltételek mérhető hatással vannak az akkumulátor teljesítményére:
● Alacsony hőmérséklet csökkentik a ionok mozgékonyságát, és növelik a belső ellenállást
● Magasabb tengerszint feletti magasság csökkenti a propeller hatékonyságát a levegő sűrűségének csökkenése miatt
● Szélzavarok kompenzáló tolóerőt igényelnek, ami növeli az energiafelhasználást
Ezeket a változókat be kell építeni az előrejelző kifáradási modellekbe.
4.3 Elektrokémiai öregedés
A telep öregedése a következőként nyilvánul meg:
● Kapacitás-csökkenés (aktív lítium elvesztése)
● Növekvő belső ellenállás (SEI-réteg vastagodása)
● Feszültséginstabilitás terhelés alatt
Ezek a tényezők csökkentik a hasznosítható energiamennyiséget, és gyorsítják a hőterhelést nagy teljesítményű manőverek során.
5. Töltési időtartam: Elektrokémiai és hőmérsékleti korlátozások
5.1 Szabványos töltési módok
A töltési időtartamot a konstans áram/konstans feszültség (CC/CV) protokoll határozza meg. A tipikus töltési idők a következők:
● Mikro-UAS-ok: 30–90 perc
●Fogyasztói UAS-ok: 60–120 perc
● Professionális UAS-ok: 90–180 perc
5.2 Gyors töltés korlátozásai
A gyors töltés növeli a litium lerakódás kockázatát, megnöveli a hőterhelést, és gyorsítja az öregedést. A tudományos kutatások egyhangúan kimutatták, hogy a nagy teljesítményű töltés csökkenti a ciklusélettartamot az SEI-réteg instabilitása és az elektródákra ható mechanikai feszültség miatt.
5.3 Párhuzamos töltés nagy teljesítményű alkalmazásokban
A párhuzamos töltés széles körben elterjedt az FPV-közösségekben, de kockázatokat jelent a feszültségkülönbség és a termikus futási kockázat tekintetében. A biztonság fenntartásához elengedhetetlen a megfelelő egyenlítés és folyamatos figyelés.
6. Kiemelt üzemidő elérésének stratégiái: Rendszerinženyeri megközelítés

6.1 Hőmérséklet-szabályozás
Akkumulátorok optimális hőmérsékleti tartományban (20–30 °C) történő üzemeltetése javítja az ionvezetőképességet, és csökkenti a feszültségcsökkenést.
6.2 Szerkezeti és hajtási optimalizáció
● Hatékony propellerek
● Alacsony KV-motorok tartósságot biztosító platformokhoz
● Aerodinamikailag optimalizált légiforgalmi járműtestek
Ezek a tervezési döntések csökkentik az egységnyi tolóerőre jutó teljesítményfelhasználást.
6.3 Akkumulátor-kezelési gyakorlatok
● Mélykisülés elkerülése (<15 %)
● Tárolás 40–60 % töltöttségi szinten
● Magas hőmérsékletnek való kitettség minimalizálása
Ezek a gyakorlatok csökkentik a leromlást és megőrzik a hosszú távú teljesítményt.
7. Biztonsági szempontok a drónok akkumulátorrendszereiben
A litiumalapú akkumulátorok belső kockázatot jelentenek a magas energiasűrűségük és a gyúlékony elektrolitjuk miatt. A biztonsági szempontok közé tartoznak:
● Tárolás megfelelő feszültségen a kémiai terhelés minimalizálása érdekében
● Rendszeres vizsgálat duzzadás vagy mechanikai deformáció elkerülése érdekében
● Tűzálló burkolat használata töltés és tárolás közben
Ezek a intézkedések elengedhetetlenek a termikus elszabadulás eseményeinek megelőzéséhez.
8. Jövőbeli irányok a drónok energia-kutatásában
8.1 Szilárdtest-akkumulátorok
A szilárdtest-elektrolitok ígéretei:
● Magasabb energiasűrűség
● Javított hőmérsékleti stabilitás
● Csökkent kockázata a dendritképződésnek
8.2 Hidrogén-üzemanyag-cellák
Az üzemanyagcellás UAV-ok többórás üzemidejű működést biztosítanak, így ígéretes alternatívát kínálnak hosszú távolságú küldetésekhez.
8.3 Napenergiával kiegészített rendszerek
A napenergiával integrált, rögzített szárnyú UAV-ok kedvező körülmények között majdnem folyamatos üzemelésre képesek.
8.4 Grafén és fejlett nanomaterialok
A grafénalapú elektródák lehetővé tehetik az ultra-gyors töltést és a javított hőteljesítményt, bár a kereskedelmi alkalmazásuk továbbra is korlátozott.
9. Következtetés
A telep teljesítménye továbbra is meghatározó korlátot jelent az UAS (légi járművek) üzemidejére és üzemeltetési hatékonyságára. E cikk egy tudományos elemzés révén – amely az elektrokémiai viselkedést, a környezeti függőségeket és a rendszerszintű optimalizálási stratégiákat vizsgálja – kiemeli az UAS-energia-korlátok sokrétű jellegét. A fejlett anyagok, a hibrid energiaarchitektúrák és az intelligens energiakezelési algoritmusok iránti folyamatos kutatás elengedhetetlen lesz a jelenlegi üzemidő-korlátok leküzdéséhez és a következő generációs, magas teljesítményű UAS-platformok lehetővé tételéhez.
