
Abstrakt
Energilagring förblir den främsta flaskhalsen för prestandan hos obemannade luftfarkoster (UAS). Även om betydande framsteg har uppnåtts inom aerostrukturoptimering, autonom navigering och lättviktiga kompositmaterial begränsar de elektrokemiska begränsningarna i dagens batteriteknologier fortfarande flygtiden och driftkontinuiteten. Den här artikeln ger en vetenskaplig analys av drönarbatteriprestanda med fokus på flygtid, laddningsdynamik, nedbrytningsvägar och beroende av miljöförhållanden. Genom att integrera begrepp från elektrokemi, flygteknik och systemoptimering syftar diskussionen till att etablera en teoretisk grund för att förstå begränsningarna och framtida utvecklingsriktningar för UAS-energisystem.
1. inledning
Den snabba utvidgningen av UAS-tillämpningar – från precisionsskötsel inom jordbruket och geospatial mätning till nödinsatser och miljöövervakning – har ökat efterfrågan på pålitliga ombordenergisystem. Till skillnad från bemannade flygplan, som kan utnyttja bränslen med hög energitäthet, är elektriska drönare grundläggande begränsade av batteriernas specifika energi och effektkarakteristik. Därmed är en drönars räckvidd inte bara en funktion av luftfarkostens konstruktion eller framdrivningseffektivitet, utan är i grunden kopplad till det elektrokemiska beteendet hos dess energilagringssystem.
Det akademiska intresset för UAS-batteriprestanda har ökat kraftigt, drivet av behovet att kvantifiera energiförbruksmodeller, förutsäga försämring och utveckla hybrida eller nästa generations lagringslösningar. Den här artikeln sammanfattar nuvarande kunskap för att ge en rigorös undersökning av flygtider och laddningstider inom den bredare ramen för UAS-energisystemkonstruktion.
2. Batterikemi i UAS: Elektrokemiska grunden
2.1 Litiumpolymersystem (LiPo)
LiPo-batterier dominerar flerrotor-UAS på grund av deras höga specifika effekt och förmåga att klara höga urladdningshastigheter. Deras polymera elektrolytarkitektur minskar vikten och möjliggör flexibla formfaktorer, vilket är fördelaktigt för kompakta luftfartygsramar.
Ur ett elektrokemiskt perspektiv uppvisar LiPo-celler:
● Hög C-hastighets-tolerans , vilket möjliggör snabb strömutdragning utan kraftig spänningsfall
● Låg inre impedans , vilket förbättrar transientresponsen vid justeringar av driften
●Hög gravimetrisch effekttäthet , vilket är avgörande för lyftintensiva flerrotorplattformar
LiPo-systemen är dock känsliga för elektrolytdekomposition, dendritbildning och termisk instabilitet. Dessa nedbrytningsvägar minskar cykeltiden och ställer stränga krav på laddnings- och lagringsprotokoll.
2.2 Litiumjonbatterier (Li-ion)
Litiumjonbatterier, särskilt de som använder NMC- eller NCA-kemi, erbjuder högre specifik energi och förbättrad cykelstabilitet. Deras elektrokemiska stabilitet gör dem lämpliga för fastvingade UAS och uppdrag med lång varaktighet där kontinuerlig effekt, snarare än topp-effekt, är det främsta kravet.
Huvudsakliga fördelar inkluderar:
● Utmärkt energitäthet , vilket möjliggör förlängda uppdragsvaraktigheter
●Lägre självurladdning , vilket är fördelaktigt för intermittenta insatser
●Förbättrad strukturell robusthet , vilket minskar risken för mekaniskt fel
Deras lägre toppurladdningsförmåga begränsar dock tillämpbarheten i flygningsregimer med hög drifthastighet eller mycket dynamisk rörelse.
3. Flygtid: En multivariat modell för energiförbrukning
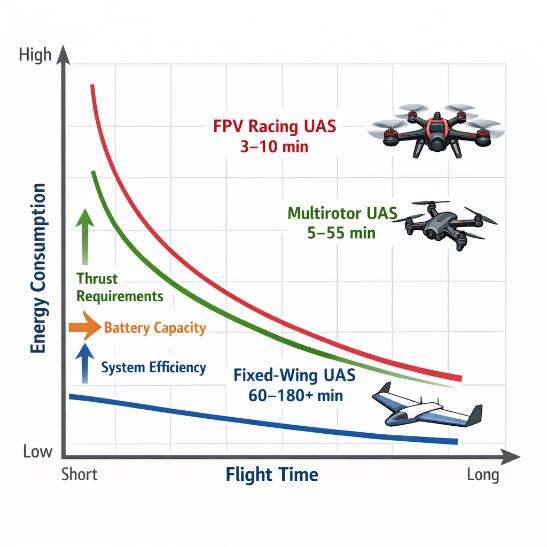
Flygtid för obemannade luftfarkoster (UAS) styrs av ett komplext samspel mellan aerodynamiska, mekaniska och elektrokemiska variabler. Akademiska modeller uttrycker vanligtvis flygtiden som en funktion av kraven på lyftkraft, batterikapacitet och systemeffektivitet.
3.1 Multikopterplattformar
Multikopter-UAS kräver kontinuerlig lyftkraft för att upprätthålla höjd, vilket resulterar i hög effektförbrukning. Typiska flygtidsintervall inkluderar:
● Mikro-UAS: 5–15 minuter
● Konsument-UAS: 20–40 minuter
● Professionella UAS: 30–55 minuter
Den maximala flygtiden är grundläggande begränsad av den kvadratiska relationen mellan lyftkraft och effektkrav.
3.2 Fastvingade plattformar
Fastvingade UAS genererar lyftkraft aerodynamiskt, vilket minskar effektförbrukningen avsevärt. Flygtiden ligger vanligtvis mellan 60 och 180+ minuter, beroende på vingbelastning, framdrivningseffektivitet och batterikapacitet.
3.3 Högeffektiva FPV-system
FPV-racedronar visar extremt höga urladdningshastigheter, ofta över 50–100 C, vilket resulterar i flygtider på 3–10 minuter. Dessa plattformar prioriterar momentan effekt framför hållbarhet, vilket gör dem till idealiska fallstudier för batteribeteende under hög belastning.
4. Bestämningsfaktorer för flygtid: En teknisk analys

4.1 Aerodynamisk och mekanisk last
Ökad lastmassa kräver större lyftkraft, medan lastens geometri påverkar luftmotståndskoefficienten. Båda faktorerna ökar direkt effektförbrukningen.
4.2 Beroende av miljöförhållanden
Miljöförhållandena påverkar batteriprestandan på ett mätbart sätt:
● Låga temperaturer minskar jonrörelseförmågan och ökar den inre resistansen
● Höga höjder minskar propellernas verkningsgrad på grund av lägre luftdensitet
● Vindstörningar kräver kompenserande dragkraft, vilket ökar energiförbrukningen
Dessa variabler måste inkluderas i prediktiva uthållighetsmodeller.
4.3 Elektrokemisk åldring
Batteriåldring visar sig genom:
● Kapacitetsminskning (förlust av aktivt litium)
● Ökad inre resistans (tjocknande av SEI-skiktet)
● Spänningsinstabilitet under belastning
Dessa faktorer minskar den användbara energin och förstärker termisk stress vid manövrer med hög effekt.
5. Laddningstid: Elektrokemiska och termiska begränsningar
5.1 Standardladdningsregimer
Laddningstiden styrs av konstantström/konstantspänningsprotokollet (CC/CV). Typiska laddningstider inkluderar:
● Mikro-UAS: 30–90 minuter
●Konsument-UAS: 60–120 minuter
● Professionella UAS: 90–180 minuter
5.2 Begränsningar för snabbladdning
Snabbladdning ökar risken för litiumplätering, höjer den termiska belastningen och accelererar försämringen. Akademiska studier visar konsekvent att laddning med hög strömminskar cykeltiden på grund av instabilitet i SEI-skiktet och elektrodspänning.
5.3 Parallellladdning i högpresterande applikationer
Parallellladdning används omfattande i FPV-samhällen men medför risker kopplade till spänningsobalans och termisk genomgång. Korrekt balansering och övervakning är avgörande för att säkerställa säkerheten.
6. Strategier för att förbättra drifttid: En systemteknisk ansats

6.1 Termisk konditionering
Att hålla batterier inom det optimala temperaturområdet (20–30 °C) förbättrar jonledningsförmågan och minskar spänningsfall.
6.2 Strukturell och framdrivningsoptimering
● Effektiva propellrar
● Motorer med låg KV för plattformar med hög räckvidd
● Aerodynamiskt optimerade flygkroppar
Dessa designval minskar effektförbrukningen per enhet stöt.
6.3 Batterihanteringsrutiner
● Undvika djupurladdning (<15 %)
● Förvara vid 40–60 % laddningsnivå
● Minimera exponering för höga temperaturer
Dessa metoder minskar försämring och bevarar långsiktig prestanda.
7. Säkerhetsaspekter i UAS-batterisystem
Litiumbaserade batterier innebär inbyggda risker på grund av hög energitäthet och brandfarliga elektrolyter. Säkerhetsaspekter inkluderar:
● Förvaring vid lämplig spänning för att minimera kemisk belastning
● Regelbunden inspektion för svullnad eller mekanisk deformation
● Användning av brandsäker förpackning under laddning och förvaring
Dessa åtgärder är avgörande för att förhindra termisk genomgående.
8. Framtida riktningar inom energiforskning för UAS
8.1 Faststofsbatterier
Faststofselektrolyter lovar:
● Högre energitäthet
● Förbättrad termisk stabilitet
● Minskad risk för dendritbildning
8.2 Vätebränsleceller
UAS med bränsleceller visar flertimmars drifttid och utgör ett lovande alternativ för långdistansuppdrag.
8.3 Solstödda system
Fastvingade UAS med integrerad solenergi kan uppnå nästan kontinuerlig drift under gynnsamma förhållanden.
8.4 Grafen och avancerade nanomaterial
Grafenförstärkta elektroder kan möjliggöra extremt snabb laddning och förbättrad termisk prestanda, även om kommersialiseringen fortfarande är begränsad.
9. Slutförande
Batteriprestanda förblir den avgörande begränsningen för UAV:s räckvidd och driftseffektivitet. Genom en vetenskaplig granskning av elektrokemiskt beteende, miljöberoenden och systemnivåoptimeringsstrategier lyfter denna artikel fram den mångfacetterade karaktären hos UAV:s energibegränsningar. Fortsatt forskning inom avancerade material, hybrida energiarkitekturer och intelligenta kraftstyrningsalgoritmer kommer att vara avgörande för att övervinna nuvarande räckviddsbegränsningar och möjliggöra nästa generations högpresterande UAV-plattformar.
