
Abstrakt
Energilagring forblir den viktigste flaskehalsen i ytelsesområdet til ubemannede luftfartøy (UAS). Selv om betydelig fremgang er oppnådd innen aerostruktur-optimering, autonom navigasjon og lette komposittmaterialer, begrenser de elektrokjemiske begrensningene til moderne batteriteknologier fortsatt flytiden og driftenes kontinuitet. Denne artikkelen gir en faglig analyse av dronnedrifterbatteriers ytelse, med fokus på flytid, ladeytelse, nedbrytningsmekanismer og avhengighet av miljøforhold. Ved å integrere konsepter fra elektrokjemi, luft- og romfartsteknikk og systemoptimering har diskusjonen som mål å etablere et teoretisk grunnlag for å forstå begrensningene og fremtidige utviklingslinjer for energisystemer i UAS.
1. Introduksjon
Den raske utvidelsen av anvendelsene for ubemannede luftfartøy (UAS) – fra nøyaktig landbruk og geospatial kartlegging til nødrespons og overvåking av miljøet – har økt etterspørselen etter pålitelige energisystemer ombord. I motsetning til bemannede luftfartøy, som kan utnytte drivstoff med høy energitetthet, er elektriske droner grunnleggende begrenset av batterienes spesifikke energi- og effektegenskaper. Derfor er en drones rekkevidde ikke bare en funksjon av luftfartøyets konstruksjon eller fremdriftseffektivitet, men er i høy grad knyttet til det elektrokjemiske oppførselen til dets energilagringssystem.
Akademisk interesse for batteriytelse i UAS har økt betydelig, drevet av behovet for å kvantifisere modeller for energiforbruk, forutsi nedbrytning og utvikle hybrid- eller neste generasjons lagringsløsninger. Denne artikkelen samler inn dagens kunnskap for å gi en grundig gjennomgang av flytids- og ladevarighet i lys av det bredere perspektivet på energisystemdesign for UAS.
2. Batterikjemier i UAS: Elektrokjemiske grunnlag
2.1 Litium-polymersystemer (LiPo)
LiPo-batterier dominerer multirotor-UAS på grunn av deres høye spesifikke effekt og evne til å opprettholde høye utladningsrater. Deres polymer-elektrolyttarkitektur reduserer masse og tillater fleksible formfaktorer, noe som er fordelaktig for kompakte luftfartøyrammer.
Fra et elektrokjemisk perspektiv viser LiPo-celler:
● Høy C-rate-toleranse , noe som muliggjør rask strømutføring uten alvorlig spenningsfall
● Lav indre impedans , noe som forbedrer transientsvaret under justeringer av drivkraft
●Høy gravimetriske effekttetthet , noe som er avgjørende for hevelsesintensive multirotorplattformer
LiPo-systemer er imidlertid utsatt for elektrolyttdekomposisjon, dendrittformasjon og termisk ustabilitet. Disse nedbrytningsmekanismene reduserer sykluslivet og stiller strenge krav til lade- og lagringsprosedyrer.
2.2 Litium-ion (Li-ion)-systemer
Li-ion-batterier, spesielt de som bruker NMC- eller NCA-kjemier, gir høyere spesifikk energi og bedre syklusstabilitet. Deres elektrokjemiske stabilitet gjør dem egnet for fastvingede UAS og oppdrag med lang rekkevidde der vedvarende effekt, snarere enn topp-effekt, er hovedkravet.
Hovedfordeler inkluderer:
● Utmerket Energidensitet , noe som muliggjør utvidede oppdragsvarigheter
●Lavere selvutladning , nyttig ved periodisk innsetning
●Forbedret strukturell robusthet , noe som reduserer risikoen for mekanisk svikt
Deres lavere topputladningsevne begrenser imidlertid bruken i flyområder med høy drivkraft eller sterkt dynamisk flyging.
3. Flytid: En flervariabel modell for energiforbruk
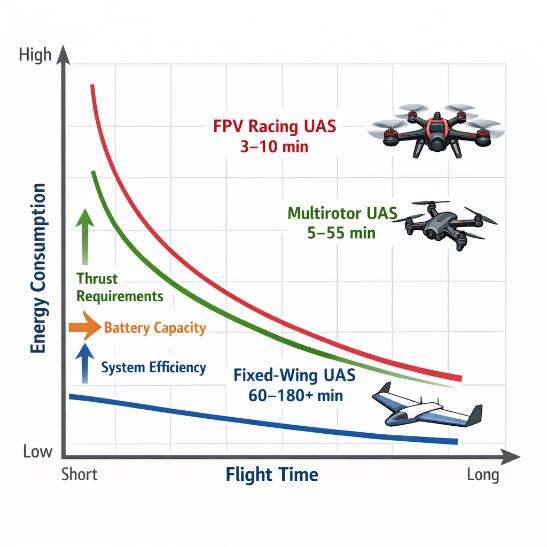
Flytidsvarighet for UAS styres av en kompleks samspill mellom aerodynamiske, mekaniske og elektrokjemiske variabler. Akademiske modeller uttrykker vanligvis flytidsvarighet som en funksjon av krevene skyvekrefter, batterikapasitet og systemeffektivitet.
3.1 Multikopterplattformer
Multirotor-UAS krever kontinuerlig skyvekraft for å opprettholde løft, noe som resulterer i høy effektförbrukning. Typiske flytidsvarighetsområder inkluderer:
● Mikro-UAS: 5–15 minutter
● Forbruker-UAS: 20–40 minutter
● Profesjonelle UAS: 30–55 minutter
Takverdien for flytidsvarighet er grunnleggende begrenset av den kvadratiske sammenhengen mellom skyvekraft og effektbehov.
3.2 Fastvingeplattformer
Fastvinge-UAS oppnår løft aerodynamisk, noe som reduserer effektförbrukningen betydelig. Flytidsvarigheten ligger vanligvis mellom 60 og 180+ minutter, avhengig av vingebelastning, fremdriftseffektivitet og batterikapasitet.
3.3 Høyytelses FPV-systemer
FPV-racingdroner viser ekstremt høye utladningsrater, ofte over 50–100 C, noe som resulterer i flyvetider på 3–10 minutter. Disse plattformene prioriterer momentan effekt fremfor rekkevidde, noe som gjør dem til ideelle casestudier for batterioppførsel under høy belastning.
4. Faktorer som påvirker flygerekkvidde: En teknisk analyse

4.1 Aerodynamisk og mekanisk belastning
Økt nyttelastmasse øker den nødvendige driften, mens nyttelastens geometri påvirker luftmotstandskoeffisientene. Begge faktorene øker direkte efforbruket.
4.2 Miljøavhengigheter
Miljøforhold har målbare effekter på batteriytelsen:
● Lave Temperaturer reduserer ionmobiliteten og øker den indre motstanden
● Høye høyder reduserer propellereffektiviteten på grunn av lavere lufttetthet
● Vindforstyrrelser krever kompenserende drivkraft, noe som øker energiforbruket
Disse variablene må inkluderes i prediktive rekkeviddemodeller.
4.3 Elektrokjemisk aldrende
Batterialdrende viser seg gjennom:
● Kapasitetsnedgang (tap av aktivt litium)
● Økt indre motstand (tykkere SEI-lag)
● Spenningsustabilitet under belastning
Disse faktorene reduserer bruksbar energi og akselererer termisk stress under manøvrer med høy effekt.
5. Ladevarighet: Elektrokjemiske og termiske begrensninger
5.1 Standardladeprogram
Ladevarigheten styres av konstantstrøm/konstantspenning (CC/CV)-protokollen. Typiske ladetider inkluderer:
● Mikro-UAS: 30–90 minutter
●Forbruker-UAS: 60–120 minutter
● Profesjonelle UAS: 90–180 minutter
5.2 Begrensninger ved hurtiglading
Hurtiglading øker risikoen for litiumavleiring, hever den termiske belastningen og akselererer nedbrytning. Akademiske studier viser konsekvent at lading med høy strømrate reduserer sykluslivet på grunn av ustabilitet i SEI-laget og elektrodespenning.
5.3 Parallelllading i høytytende applikasjoner
Parallelllading brukes mye i FPV-samfunn, men innebär risiko for spenningsubalanse og termisk løsrivelse. Riktig balansering og overvåking er avgjørende for å sikre sikkerheten.
6. Strategier for å forbedre holdbarhet: En systemteknisk tilnærming

6.1 Termisk regulering
Å holde batteriene innenfor den optimale temperaturspannet (20–30 °C) forbedrer ionledningsevnen og reduserer spenningsfall.
6.2 Strukturell og framdriftsoptimering
● Høyeffektive propellere
● Motorer med lav KV-verdi for plattformer med lang rekkevidde
● Aerodynamisk optimaliserte luftfartøyrammer
Disse designvalgene reduserer efforbruket per enhet skyvekraft.
6.3 Praksis for batteristyring
● Unngå dyp utladning (< 15 %)
● Lagring ved 40–60 % ladestatus
● Minimere eksponering for høye temperaturer
Disse tiltakene reduserer nedbrytning og sikrer langvarig ytelse.
7. Sikkerhetsovervejelser for batterisystemer i UAS
Litiumbaserte batterier innebär inneboende risiko på grunn av høy energitetthet og brennbare elektrolytter. Sikkerhetsovervejelser inkluderer:
● Lagring ved riktig spenning for å minimere kjemisk stress
● Regelmessig inspeksjon ved oppsvelling eller mekanisk deformasjon
● Bruk av brannsikker innkapsling under lading og lagring
Disse tiltakene er avgjørende for å forhindre termisk løsrivelse.
8. Fremtidige retninger innen energiforskning for UAS
8.1 Faststoffbatterier
Faststoffelektrolytter lover:
● Høyere energitetthet
● Forbedret termisk stabilitet
● Redusert risiko for dendrittutvikling
8.2 Hydrogenbrenselceller
UAS med brenselceller demonstrerer fler-times driftstid og utgjør et lovende alternativ for oppdrag over lange avstander.
8.3 Solcelleforsterkede systemer
Fastvinge-UAS med integrerte solceller kan oppnå nesten kontinuerlig drift under gunstige forhold.
8.4 Grafen og avanserte nanomaterialer
Elektroder forbedret med grafen kan muliggjøre ultra-rask ladning og forbedret termisk ytelse, selv om kommersialisering fortsatt er begrenset.
9. Konklusjon
Batteriytelsen forblir den avgjørende begrensningen for dronestasjons (UAS) rekkevidde og driftseffektivitet. Gjennom en faglig gjennomgang av elektrokjemisk atferd, miljøavhengigheter og systemnivåoptimeringsstrategier fremhever denne artikkelen den flerfacetterte karakteren til energibegrensningene for dronestasjoner. Videre forskning på avanserte materialer, hybridenergiarkitekturer og intelligente strømstyringsalgoritmer vil være avgjørende for å overvinne nåværende begrensninger i rekkevidde og muliggjøre neste generasjon av høytytende dronestasjonsplattformer.
