
Abstrakt
Driftskontinuiteten til ubemannede luftfartøy (UAV-er) er grunnleggende begrenset av tilgjengeligheten og riktig vedlikehold av deres bordmonterte elektrokjemiske energilagringssystemer. Selv om laderne som leveres av produsenten er utviklet for å sikre overholdelse av de strenge kravene til litiumbaserte batterikjemier, foregår reelle UAV-innsatser ofte i miljøer der slike utstyr ikke er tilgjengelig. Denne artikkelen utvikler en systemnivåanalytisk ramme for å forstå hvordan dronedrifter kan gjenopplades uten sine opprinnelige ladere. Ved å bygge på prinsipper fra elektrokjemi, kraftelektronikk og forskning på energistyring for UAV-er, vurderer studien alternative ladeveier, identifiserer deres tekniske gjennomførbarhet og avgrenser sikkerhetsrammene innenfor hvilke slike metoder kan brukes ansvarlig.
1. Introduksjon
Utbredelsen av UAV-teknologier innenfor vitenskapelige, industrielle og kommersielle områder har økt behovet for pålitelige og tilpasningsdyktige energistyringsstrategier. Litium-polymere (LiPo) og litium-ionbatterier (Li-ion)—på grunn av deres høye spesifikke energi og gunstige utladningsegenskaper—er fortsatt de dominerende strømkildene for UAV-driftssystemer. Disse kjemiene setter imidlertid strenge driftsbegrensninger, særlig under lading, der avvik fra angitte spennings-, strøm- eller termiske forhold kan føre til u reversibel nedgang eller katastrofal svikt.
Under feltoperasjoner kan brukere av UAV-er støte på scenarier der det opprinnelige ladeutstyret er tapt, skadet eller på annen måte utilgjengelig. Den sentrale utfordringen er derfor å avgjøre om alternative lade-mekanismer kan reprodusere den elektrokjemiske miljøet som kreves for trygg og effektiv energigjenoppretting. Denne artikkelen tar opp denne utfordringen ved å undersøke de teoretiske grunnlagene, tekniske kravene og praktiske begrensningene ved ikke-standardiserte lade-metoder.
2. Elektrokjemiske og tekniske grunnlag for lading av UAV-batterier
2.1 Lithiumbaserte batterikjemier
LiPo- og Li-ion-batterier virker gjennom reversible litium-ion-interkalasjonsprosesser. Deres ytelse og levetid avhenger av å opprettholde:
● Spenningsstabilitet innenfor smale elektrokjemiske vinduer
● Kontrollert strømflyt for å unngå litiumavleiring
● Termisk likevekt for å unngå akselerert SEI-forringelse
● Balanse mellom celler i flercells-konfigurasjoner
Disse begrensningene er ikke vilkårlige; de oppstår fra de indre termodynamiske og kinetiske forholdene for litium-iontransport. Enhver alternativ lade-metode må derfor tilnærme de forholdene under hvilke disse reaksjonene foregår trygt.
2.2 CC–CV-ladeprinsippet
Den klassiske ladeprotokollen for batterier basert på litium er metoden med konstant strøm–konstant spenning (CC–CV). Under CC-fasen lades batteriet med en fast strøm inntil det når sin maksimale tillatte spenning. I CV-fasen holdes denne spenningen konstant, mens strømmen gradvis avtar. Denne tofasede fremgangsmåten minimerer belastningen på elektrodematerialene og reduserer risikoen for litiumavleiring.
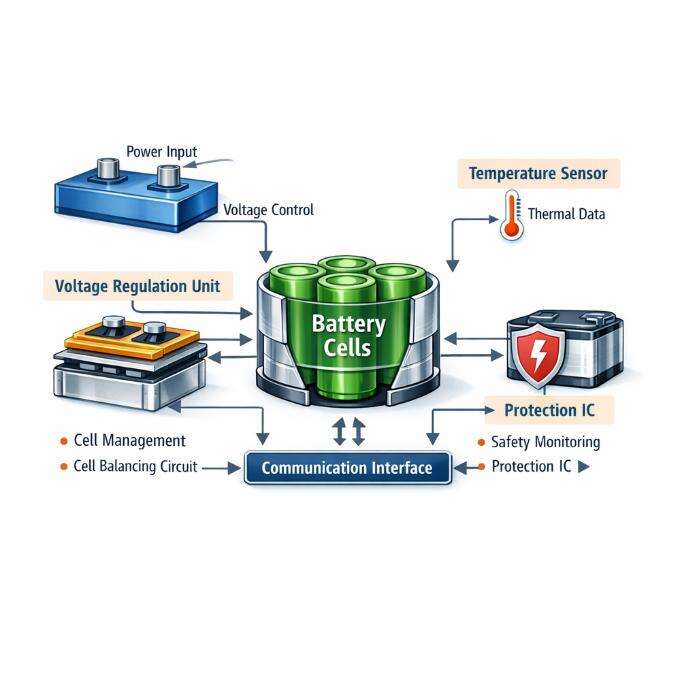
2.3 Batteristyringssystemer (BMS)
Mange forbruker-UAV-er inneholder intelligente batterier utstyrt med BMS-moduler som utfører følgende funksjoner:
● Regulering av spenning og strøm i sanntid
● Termisk overvåking
● Balansering av celler
● Feildeteksjon
Nærværet av et BMS utvider betydelig rekkevidden av mulige ladealternativer, siden batteriet selv kan kompensere for uregelmessigheter i den eksterne strømkilden.
3. Alternative lademekanismer: En teknisk og analytisk gjennomgang
3.1 Universelle balanseladere
3.1.1 Funksjonell arkitektur
Universelle balanseladere er mikrokontrollerbaserte strømreguleringsenheter som kan utføre CC–CV-lading samtidig som de balanserer celle-spenningsnivåene. Deres interne algoritmer justerer dynamisk strøm og spenning for å opprettholde elektrokjemisk stabilitet.
3.1.2 Tekniske fordeler
● Høy nøyaktighet i forhold til produsentens spesifiserte ladeprofiler
● Integrerte sikkerhetsmekanismer
● Kompatibilitet med ulike batterikonfigurasjoner
Fra et ingeniørperspektiv etterligner denne metoden mest nøyaktig oppførselen til originale utstyrsleverandørers (OEM) ladere og er derfor det mest teknisk forsvarlige alternativet.
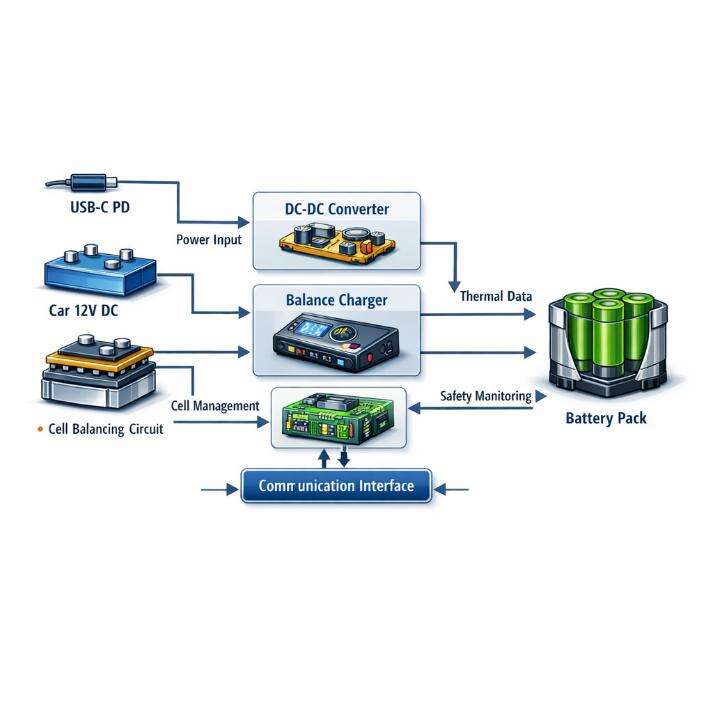
3.2 USB-C-strømforsyning med strømlevering for intelligente batterier
3.2.1 Underliggende mekanisme
USB-C PD støtter ikke i utgangspunktet opplading av litiumbatterier. I stedet inneholder intelligente batterier DC-DC-konvertere og beskyttelseskretser som omformer USB-inngangen til et regulert ladeområde. Den eksterne strømkilden leverer bare energi; batteriets interne elektronikk styrer ladeprosessen.
3.2.2 Anvendbarhetsbegrensninger
Denne metoden er bare egnet for batterier med integrert BMS. Rå LiPo-pakker mangler den nødvendige reguleringen og kan derfor ikke trygt lades via USB-baserte systemer.
3.3 Førøyebundne ladesystemer
3.3.1 Bilens elektriske infrastruktur
Biler gir en stabil 12 V DC-strømforsyning som kan konverteres til vekselstrøm (AC) eller regulert likestrøm (DC) ved hjelp av strømvekslere. Denne infrastrukturen kan støtte balanseladere eller bilspesifikke ladere for droner, noe som gjør biler til en praktisk mobil ladeplattform.
3.3.2 Ingeniørtekniske hensyn
● Spenningsvariasjoner må dempes
● Lading med motor av kan føre til uttømming av bilens batteri
● Termisk styring forblir avgjørende
3.4 Solenergidrevne ladearkitekturer
3.4.1 Integrering av fotovoltaiske paneler
Solcellepaneler genererer variabel likestrøm som avhenger av innfallende stråling. Når de kombineres med en regulert strømstasjon eller omformer, kan de støtte lading av UAV-batterier i fjerne områder.
3.4.2 Begrensninger
● Lav ladeeffektivitet
● Avhengighet av miljøforhold
● Behov for mellomliggende reguleringselektronikk
Solbasert lading bør derfor betraktes som en kompletterende eller nødløsning, ikke som en primær ladestrategi.
3.5 Laboratoriekvalitets strømforsyninger (kun for eksperter)
3.5.1 Teknisk gjennomførbarhet
Programmerbare likestrømsstrømforsyninger kan emulere CC–CV-ladning hvis de er konfigurert med presisjon. De mangler imidlertid evne til cellebalansering, noe som gjør dem uegnede for flercellepakker med mindre de kombineres med ekstern balanseringsutstyr.
3.5.2 Risikovurdering
På grunn av den høye sannsynligheten for feilkonfigurering er denne metoden bare egnet for brukere med formell opplæring innen kraftelektronikk eller elektrokjemisk ingeniørfag.
4. Lademetoder som må utelukkes fullstendig
Flere improviserte lademetoder dukker ofte opp i nettbaserte diskusjoner, men mangler vitenskapelig gyldighet. Disse omfatter:
● Direkte tilkobling til mobiltelefon- eller bærbartdatamaskinladere
● Lading via uregulerte likestrømkilder
● Direkte tilkobling av LiPo-pakker til bilbatterier
Slike metoder bryter med grunnleggende elektrokjemiske begrensninger og utgjør alvorlige sikkerhetsrisikoer, inkludert termisk løsning og cellebrudd.
5. Ladeeffektivitet og tidsmessige dynamikker
Ladetiden påvirkes av:
● Batterikapasitet
● Tilgjengelig inngangseffekt
● Effektiviteten til ladesystemet
Balanseladere oppnår vanligvis høyest effektivitet, mens solbaserte systemer viser lavest effektivitet. USB-C PD befinner seg på et mellomnivå, begrenset hovedsakelig av dets maksimale effektleveringskapasitet.
6. Sikkerhetsrammeverk for ikke-standard ladning
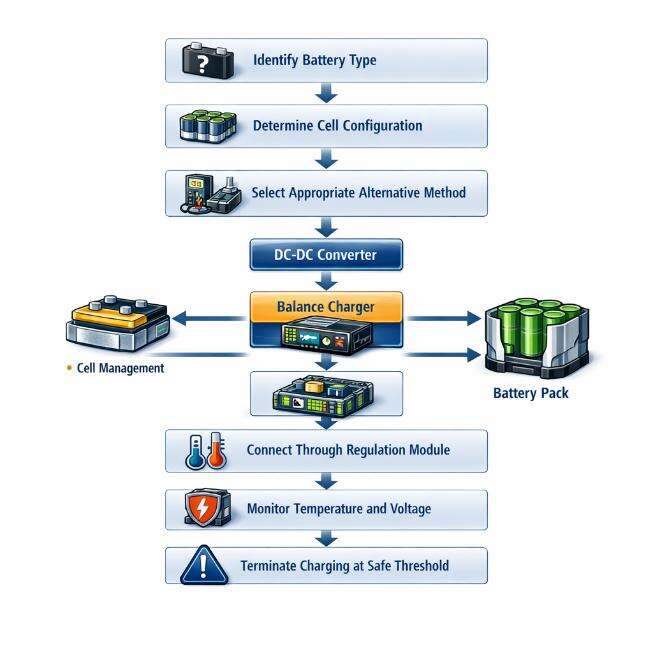
En streng sikkerhetsprotokoll bør inkludere:
● Kontinuerlig temperaturovervåking
● Bruk av ildsikre innkapslingssystemer
● Unngå opplading uten oppsyn
● Verifisering av spennings- og strømparametere
Disse tiltakene reduserer de iboende risikoene knyttet til energilagring basert på litium.
7. Nødtiltak og operativ beredskap
Når det ikke er noe ladeutstyr tilgjengelig, er de mest pålitelige løsningene:
● Å låne kompatible ladere
● Å besøke RC-hobbybutikker
● Å bruke offentlige eller profesjonelle ladeanlegg
Strategier for langsiktig beredskap inkluderer vedlikehold av redundante ladere, bæring av strømbanker med PD-funksjon og sammensetting av modulære feltladeutstyr.
8. Konklusjon
Å lade en dronebatteri uten dens opprinnelige lader er teknisk mulig under spesifikke forhold. Muligheten for alternative metoder avhenger av tilstedeværelsen av beskyttende elektronikk, tilgjengeligheten av regulerte strømkilder og brukerens forståelse av litiumbatteriers oppførsel. Ved å bruke ingeniørinformerade praksiser og følge sikkerhetsprotokoller kan UAV-operatører opprettholde driftskontinuitet selv i ressursbegrensede miljøer.
