
Abstrakt
Den operative kontinuitet for ubemandede luftfartøjer (UAV'er) er grundlæggende begrænset af tilgængeligheden og korrekt vedligeholdelse af deres bordmonterede elektrokemiske energilagringssystemer. Mens opladere fra producenterne er konstrueret til at sikre overholdelse af de strenge krav, som lithiumbaserede batterikemi stiller, finder reelle UAV-indsatser ofte sted i miljøer, hvor sådanne udstyr ikke er tilgængelige. Denne artikel udvikler en systemniveau-analytisk ramme til forståelse af, hvordan dronebatterier kan genoplades uden brug af deres originale opladere. Ved at bygge på principper fra elektrokemi, effektelektronik og forskning i UAV-energistyring vurderer studiet alternative opladningsveje, identificerer deres tekniske gennemførlighed og afgrænser sikkerhedsgrænserne, inden for hvilke sådanne metoder kan anvendes ansvarligt.
1. Introduktion
Udbredelsen af UAV-teknologier inden for videnskabelige, industrielle og kommercielle områder har forstærket behovet for pålidelige og tilpasningsdygtige energistyringsstrategier. Lithium-Polymer (LiPo) og Lithium-Ion (Li-ion)-batterier – på grund af deres høje specifikke energi og gunstige afladningsegenskaber – er fortsat de dominerende strømkilder til UAV-fremdriftssystemer. Disse batterityper stiller dog strenge driftsbegrænsninger, især under opladning, hvor afvigelser fra de angivne spændings-, strøm- eller termiske forhold kan føre til uigenrevlig nedbrydning eller katastrofal fejl.
Under feltoperationer kan brugere af UAV’er støde på scenarier, hvor den oprindelige opladningsenhed er gået tabt, beskadiget eller på anden måde utilgængelig. Den centrale udfordring er derfor at afgøre, om alternative opladningsmekanismer kan genskabe det elektrokemiske miljø, der kræves for sikker og effektiv energigenopfyldning. Denne artikel tager fat i denne udfordring ved at undersøge de teoretiske grundlag, ingeniørmæssige krav og praktiske begrænsninger ved ikke-standardiserede opladningsmetoder.
2. Elektrokemiske og ingeniørmæssige grundlag for opladning af UAV-batterier
2.1 Lithiumbaserede batterikemi
LiPo- og Li-ion-batterier fungerer via reversible lithium-ion-interkalationsprocesser. Deres ydelse og levetid afhænger af opretholdelse af:
● Spændingsstabilitet inden for smalle elektrokemiske vinduer
● Kontrolleret strømstrøm for at forhindre lithiumaflejring
● Termisk ligevægt for at undgå accelereret SEI-forringelse
● Cellebalance i flercellekonfigurationer
Disse begrænsninger er ikke vilkårlige; de opstår fra de indbyggede termodynamiske og kinetiske forhold for lithium-iontransport. Enhver alternativ opladningsmetode skal derfor tilnærme de betingelser, under hvilke disse reaktioner forløber sikkert.
2.2 CC–CV-opladningsparadigmet
Den klassiske opladningsprotokol for lithiumbaserede batterier er metoden med konstant strøm–konstant spænding (CC–CV). Under CC-fasen oplades batteriet med en fast strøm, indtil det når sin maksimale tilladte spænding. Under CV-fasen fastholdes denne spænding, mens strømmen gradvist aftager. Denne tofasede fremgangsmåde minimerer belastningen på elektrodematerialerne og mindsker risikoen for lithiumaflejring.
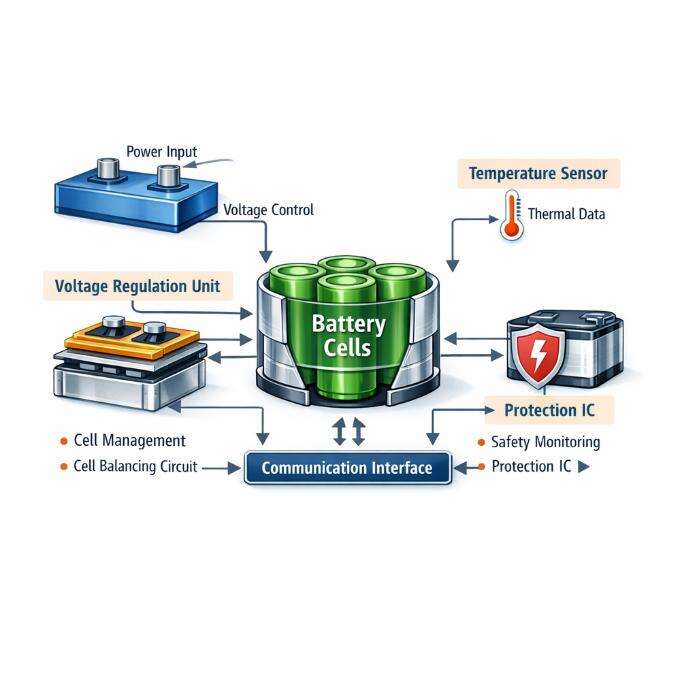
2.3 Batteristyringssystemer (BMS)
Mange forbruger-UAV’er indeholder intelligente batterier udstyret med BMS-moduler, der udfører følgende funktioner:
● Regulering af spænding og strøm i realtid
● Temperaturovervågning
● Cellebalancering
● Fejldetektering
Tilstedeværelsen af et BMS udvider betydeligt antallet af brugbare opladningsmuligheder, da batteriet selv kan kompensere for uregelmæssigheder i den eksterne strømkilde.
3. Alternative opladningsmekanismer: En teknisk og analytisk gennemgang
3.1 Universelle balanceoplader
3.1.1 Funktionsarkitektur
Universelle balanceoplader er mikrocontrollerbaserede strømtilpasningsenheder, der kan udføre CC–CV-opladning samtidig med jævning af celle-spændingerne. Deres interne algoritmer justerer dynamisk strøm og spænding for at opretholde elektrokemisk stabilitet.
3.1.2 Tekniske fordele
● Høj overensstemmelse med producentens specificerede opladningsprofiler
● Integrerede sikkerhedsforanstaltninger
● Kompatibilitet med forskellige batterikonfigurationer
Fra et ingeniørperspektiv efterligner denne metode mest præcist adfærden for OEM-opladerne og er derfor den mest teknisk velbegrundede alternative løsning.
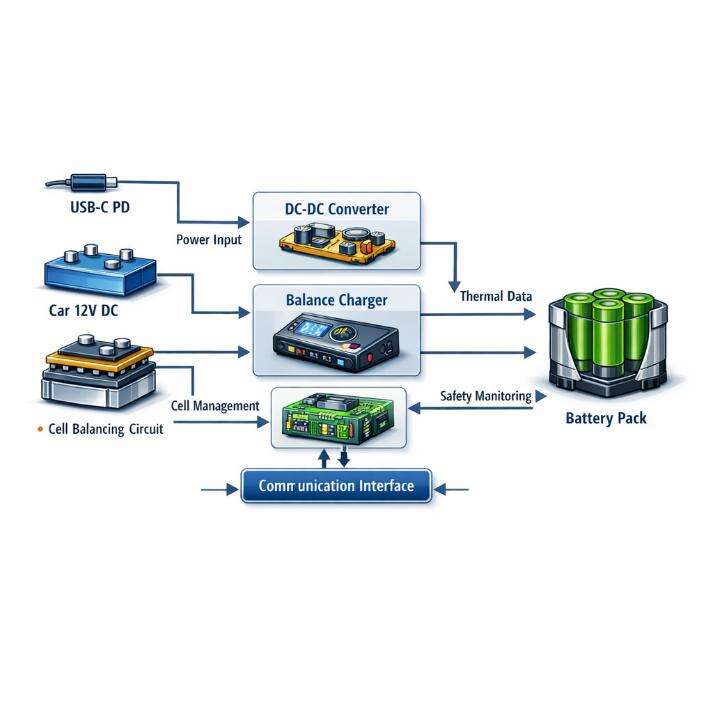
3.2 USB-C Power Delivery til intelligente batterier
3.2.1 Underliggende mekanisme
USB-C PD understøtter ikke i sig selv opladning af lithiumbatterier. I stedet indeholder intelligente batterier DC-DC-konvertere og beskyttelseskredsløb, der omdanner USB-input til en reguleret opladningsmiljø. Den eksterne strømkilde lever blot energi; batteriets interne elektronik styrer opladningsprocessen.
3.2.2 Anvendelsesbegrænsninger
Denne metode er kun anvendelig for batterier med indbygget BMS. Rå LiPo-pakker mangler den nødvendige regulering og kan derfor ikke sikkert oplades via USB-baserede systemer.
3.3 Ført-integrerede opladningssystemer
3.3.1 Automobilens elektriske infrastruktur
Biler leverer en stabil 12 V DC-strømforsyning, som kan konverteres til vekselstrøm (AC) eller reguleret jævnstrøm (DC) ved hjælp af strømomformere. Denne infrastruktur kan understøtte balanceladere eller biloplader specifikt til droner, hvilket gør køretøjer til en praktisk mobil opladningsplatform.
3.3.2 Ingeniørtekniske overvejelser
● Spændningsudsving skal afhjælpes
● Opladning med motor slukket risikerer at udtømme bilens batteri
● Termisk styring forbliver afgørende
3.4 Solenergidrevne opladningsarkitekturer
3.4.1 Integration af fotovoltaiske paneler
Solcellepaneler genererer en variabel jævnstrømsudgang, der afhænger af strålingsintensiteten. Når de kombineres med en reguleret strømforsyningsstation eller en konverter, kan de understøtte opladning af UAV-batterier i fjerne omgivelser.
3.4.2 Begrænsninger
● Lav opladningseffektivitet
● Afhængighed af miljøforhold
● Behov for mellemregulerende hardware
Solbaseret opladning bør derfor primært betragtes som en supplerende eller nødbrugs-mekanisme snarere end en primær opladningsstrategi.
3.5 Laboratoriekvalitetsstrømforsyninger (kun til brug for eksperter)
3.5.1 Teknisk gennemførlighed
Programmerbare DC-strømforsyninger kan emulere CC–CV-opladning, hvis de er konfigureret med præcision. De mangler dog evnen til cellebalancering, hvilket gør dem uegnede til flercellebatteripakker, medmindre de kombineres med ekstern balanceringshardware.
3.5.2 Risikovurdering
På grund af den høje sandsynlighed for forkert konfiguration er denne metode kun egnet for brugere med formel uddannelse inden for strømelektronik eller elektrokemisk ingeniørvidenskab.
4. Opladningsmetoder, der kategorisk bør undgås
Adskillige improviserede opladningsteknikker fremkommer ofte i online-diskussioner, men mangler videnskabelig gyldighed. Disse omfatter:
● Direkte tilslutning til telefon- eller bærbarcomputer-ladere
● Opladning via uregulerede DC-kilder
● Direkte tilslutning af LiPo-batteripakker til bilbatterier
Sådanne metoder overtræder grundlæggende elektrokemiske begrænsninger og udgør alvorlige sikkerhedsrisici, herunder termisk løberi og cellebrud.
5. Opladningseffektivitet og tidsmæssig dynamik
Opladningstiden påvirkes af:
● Batterikapacitet
● Tilgængelig indgangseffekt
● Effektiviteten af opladningskredsløbet
Balanceopladerne opnår typisk den højeste effektivitet, mens solbaserede systemer viser den laveste. USB-C PD ligger i mellemposition, primært begrænset af dens effektafgivelsesgrænse.
6. Sikkerhedsramme for ikke-standard opladning
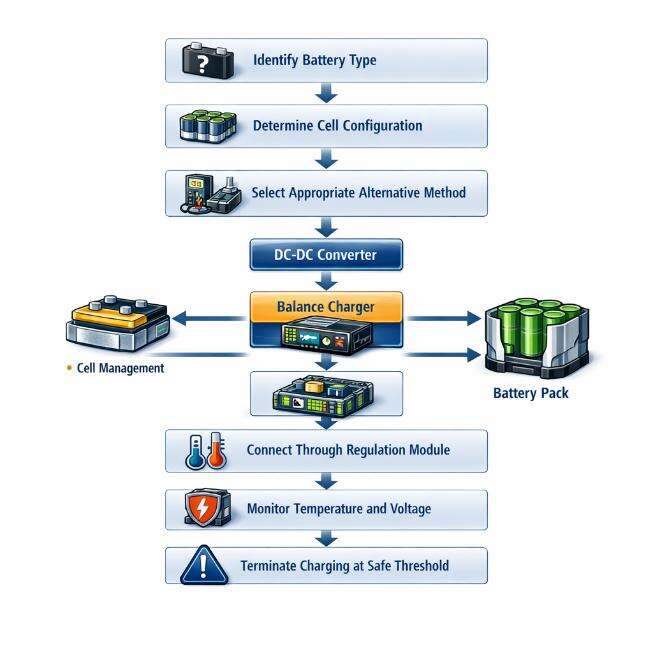
En streng sikkerhedsprotokol bør omfatte:
● Kontinuerlig temperaturovervågning
● Brug af ildhæmmende indekapslingsystemer
● Undgåelse af ubemærket opladning
● Verificering af spændings- og strømparametre
Disse foranstaltninger reducerer de iboende risici forbundet med lithiumbaserede energilagre.
7. Nødforanstaltninger og driftsmæssig beredskab
Når der ikke er noget opladningsudstyr til rådighed, er de mest pålidelige løsninger:
● At låne kompatible opladere
● At besøge RC-hobbybutikker
● At bruge offentlige eller professionelle opladestander
Langsigtede beredskabsstrategier omfatter vedligeholdelse af redundante opladere, bæring af PD-kompatible strømbanker og samling af modulære feltopladekit.
8. Konklusion
At lade en dronebatteri uden dens originale oplader er teknisk muligt under bestemte forhold. Muligheden for at bruge alternative metoder afhænger af tilstedeværelsen af beskyttende elektronik, tilgængeligheden af regulerede strømkilder og brugerenes forståelse af litiumbatteriers adfærd. Ved at anvende ingeniørkundskabsbaserede praksisformer og overholde sikkerhedsprotokoller kan UAV-operatører opretholde driftskontinuitet, selv i miljøer med begrænsede ressourcer.
