
Abstrakcja
Ciągłość działania bezzałogowych statków powietrznych (UAV) jest zasadniczo ograniczana dostępnością oraz prawidłową konserwacją ich pokładowych systemów elektrochemicznego magazynowania energii. Choć ładowarki dostarczane przez producenta są zaprojektowane tak, aby zapewnić zgodność ze ścisłymi wymaganiami dotyczącymi chemii baterii litowych, rzeczywiste wdrożenia UAV często mają miejsce w środowiskach, w których takie urządzenia nie są dostępne. W niniejszym artykule opracowano analityczną ramę systemową umożliwiającą zrozumienie sposobów ładowania akumulatorów dronów w przypadku braku ich oryginalnych ładowarek. Opierając się na zasadach elektrochemii, elektroniki mocy oraz badań nad zarządzaniem energią w UAV, badanie ocenia alternatywne ścieżki ładowania, określa ich wykonalność techniczną oraz wyznacza granice bezpieczeństwa, w obrębie których metody te mogą być stosowane w sposób odpowiedzialny.
1. Wprowadzenie
Rozprzestrzenianie się technologii bezzałogowych statków powietrznych (UAV) w dziedzinach naukowych, przemysłowych i komercyjnych nasiliło potrzebę niezawodnych i elastycznych strategii zarządzania energią. Baterie litowo-polimerowe (LiPo) i litowo-jonowe (Li-ion) — dzięki wysokiej gęstości energii właściwej oraz korzystnym charakterystykom rozładowania — pozostają dominującymi źródłami zasilania systemów napędowych UAV. Jednak te chemie nakładają surowe ograniczenia eksploatacyjne, szczególnie podczas ładowania, gdzie odchylenia od zalecanych warunków napięcia, prądu lub temperatury mogą prowadzić do nieodwracalnego zużycia lub katastrofalnego uszkodzenia.
W operacjach terenowych użytkownicy dronów (UAV) mogą napotkać sytuacje, w których oryginalne urządzenie do ładowania zostało utracone, uszkodzone lub jest w inny sposób niedostępne. Głównym wyzwaniem jest zatem określenie, czy alternatywne metody ładowania są w stanie odtworzyć środowisko elektrochemiczne niezbędne do bezpiecznego i wydajnego uzupełniania energii. W niniejszym artykule problem ten został podjęty poprzez analizę podstaw teoretycznych, wymagań inżynieryjnych oraz ograniczeń praktycznych niestandardowych metod ładowania.
2. Podstawy elektrochemiczne i inżynieryjne ładowania akumulatorów dronów (UAV)
2.1 Chemie akumulatorów litowych
Akumulatory LiPo i Li-ion działają na zasadzie odwracalnych procesów interkalacji jonów litu. Ich wydajność i trwałość zależą od utrzymania:
● stabilności napięcia w wąskich oknach elektrochemicznych
● kontrolowanego przepływu prądu w celu zapobiegania platerowaniu litu
● równowagi termicznej w celu uniknięcia przyspieszonego rozkładu warstwy SEI
● zrównoważenia napięć poszczególnych ogniw w konfiguracjach wieloogniwowych
Te ograniczenia nie są przypadkowe; wynikają one z wewnętrznej termodynamiki i kinetyki transportu jonów litu. Każda alternatywna metoda ładowania musi zatem przybliżać warunki, w których te reakcje przebiegają bezpiecznie.
2.2 Paradygmat ładowania CC–CV
Kanonową procedurą ładowania akumulatorów litowych jest metoda stałego prądu–stałego napięcia (CC–CV). W fazie CC akumulator jest ładowany prądem o stałej wartości aż do osiągnięcia maksymalnego dopuszczalnego napięcia. W fazie CV utrzymywane jest to napięcie, podczas gdy prąd stopniowo maleje. Ten dwufazowy sposób ładowania minimalizuje obciążenie materiałów elektrod i ogranicza ryzyko platerowania litu.
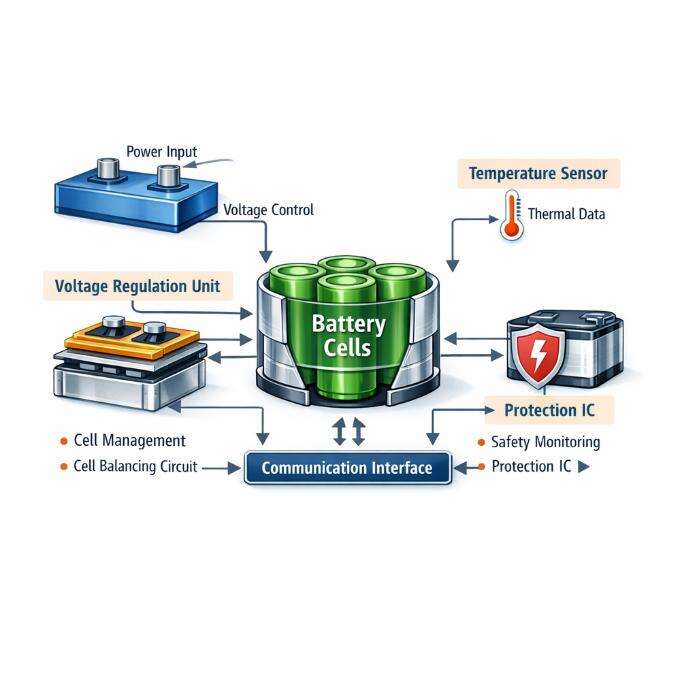
2.3 Systemy zarządzania akumulatorami (BMS)
Wiele komercyjnych dronów wyposażonych jest w inteligentne akumulatory zawierające moduły BMS, które wykonują następujące funkcje:
● Regulację napięcia i prądu w czasie rzeczywistym
● Monitorowanie temperatury
● Równoważenie ogniw
● Wykrywanie błędów
Obecność systemu BMS znacznie poszerza zakres możliwych do zastosowania metod ładowania, ponieważ sama bateria może kompensować nieregularności w zewnętrznym źródle zasilania.
3. Alternatywne mechanizmy ładowania: przegląd techniczny i analityczny
3.1 Uniwersalne ładowarki z funkcją balansowania
3.1.1 Architektura funkcjonalna
Uniwersalne ładowarki z funkcją balansowania to oparte na mikrokontrolerach urządzenia do kondycjonowania mocy, zdolne do wykonywania ładowania prądem stałym–napięciem stałym (CC–CV) przy jednoczesnym wyrównywaniu napięć ogniw. Ich wewnętrzne algorytmy dynamicznie dostosowują prąd i napięcie w celu utrzymania stabilności elektrochemicznej.
3.1.2 Zalety techniczne
● Wysoka zgodność z profilami ładowania określonymi przez producenta
● Zintegrowane mechanizmy bezpieczeństwa
● Kompatybilność z różnorodnymi konfiguracjami akumulatorów
Z inżynierskiego punktu widzenia metoda ta najbardziej wiernie odzwierciedla zachowanie oryginalnych ładowarek producenta (OEM) i jest zatem najbardziej uzasadnioną technicznie alternatywą.
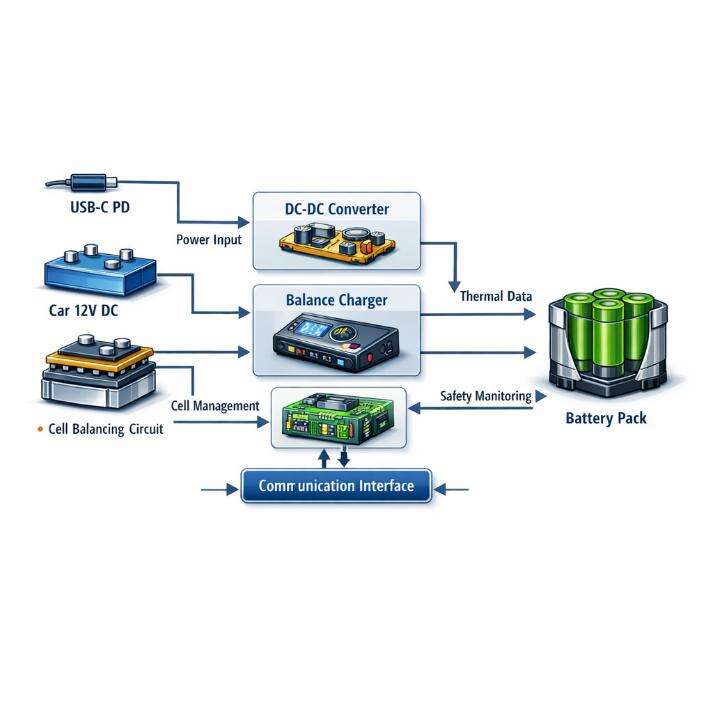
3.2 Dostawa mocy przez port USB-C z obsługą Power Delivery dla inteligentnych akumulatorów
3.2.1 Mechanizm podstawowy
Standard USB-C PD nie obsługuje w sposób wbudowany ładowania akumulatorów litowych. Zamiast tego inteligentne akumulatory zawierają konwertery DC-DC oraz obwody ochronne, które przekształcają napięcie wejściowe z portu USB w regulowaną ścieżkę ładowania. Zewnętrzne źródło zasilania dostarcza jedynie energii; proces ładowania kontrolują elektronika wewnętrzna akumulatora.
3.2.2 Ograniczenia stosowalności
Metoda ta jest możliwa wyłącznie w przypadku akumulatorów wyposażonych w wbudowany system zarządzania baterią (BMS). Surowe pakiety LiPo nie posiadają niezbędnej regulacji i dlatego nie mogą być bezpiecznie ładowane za pomocą systemów opartych na USB.
3.3 Systemy ładowania zintegrowane z pojazdami
3.3.1 Infrastruktura elektryczna pojazdów samochodowych
Samochody zapewniają stabilne napięcie stałe 12 V, które można przekształcić w napięcie przemienne (AC) lub regulowane napięcie stałe (DC) przy użyciu falowników. Ta infrastruktura może zasilać ładowarki równoważące lub specjalistyczne ładowarki samochodowe przeznaczone do dronów, czyniąc pojazdy praktyczną mobilną platformą ładowania.
3.3.2 Uwagi inżynierskie
● Fluktuacje napięcia należy zniwelować
● Ładowanie przy wyłączonym silniku niesie ryzyko wyczerpania akumulatora pojazdu
● Zarządzanie termiczne pozostaje niezbędne
3.4 Architektury ładowania napędzane energią słoneczną
3.4.1 Integracja fotowoltaiczna
Panele słoneczne generują zmienny prąd stały (DC), którego wartość zależy od natężenia promieniowania słonecznego. Po połączeniu z regulowaną stacją zasilającą lub przetwornicą mogą one wspierać ładowanie akumulatorów bezzałogowych statków powietrznych (UAV) w odległych środowiskach.
3.4.2 Ograniczenia
● Niska wydajność ładowania
● Uwarunkowanie czynnikami środowiskowymi
● Konieczność użycia dodatkowego sprzętu do regulacji
Ładowanie oparte na energii słonecznej należy więc traktować głównie jako mechanizm uzupełniający lub awaryjny, a nie jako podstawową strategię ładowania.
3.5 Zasilacze laboratoryjne (tylko dla ekspertów)
3.5.1 Możliwość techniczna
Programowalne zasilacze prądu stałego mogą symulować ładowanie CC–CV przy precyzyjnej konfiguracji. Nie posiadają jednak funkcji równoważenia ogniw, co czyni je nieodpowiednimi do pakietów wieloogniwowych, chyba że są stosowane w połączeniu z zewnętrznym sprzętem do równoważenia.
3.5.2 Ocena ryzyka
Ze względu na wysokie prawdopodobieństwo błędnej konfiguracji metoda ta jest odpowiednia wyłącznie dla użytkowników posiadających formalne wykształcenie w zakresie elektroniki mocy lub inżynierii elektrochemicznej.
4. Metody ładowania, które należy bezwzględnie wykluczyć
Niektóre improwizowane metody ładowania często pojawiają się w dyskusjach internetowych, lecz nie mają podstaw naukowych. Obejmują one:
● Bezpośrednie podłączenie do ładowarek do telefonów lub laptopów
● Ładowanie za pomocą niestabilizowanych źródeł prądu stałego
● Bezpośrednie podłączanie pakietów LiPo do akumulatorów samochodowych
Takie metody naruszają podstawowe ograniczenia elektrochemiczne i stanowią poważne zagrożenia dla bezpieczeństwa, w tym ryzyko rozbiegu termicznego oraz pęknięcia ogniw.
5. Wydajność ładowania i dynamika czasowa
Czas ładowania zależy od:
● Pojemności akumulatora
● Dostępności mocy wejściowej
● Wydajności obwodów ładowania
Ładowarki zrównoważone osiągają zazwyczaj najwyższą wydajność, podczas gdy systemy oparte na energii słonecznej charakteryzują się najniższą wydajnością. Ładowanie za pośrednictwem portu USB-C PD zajmuje pozycję pośrednią, ograniczoną głównie przez maksymalną moc przekazywaną.
6. Ramy bezpieczeństwa dla niestandardowego ładowania
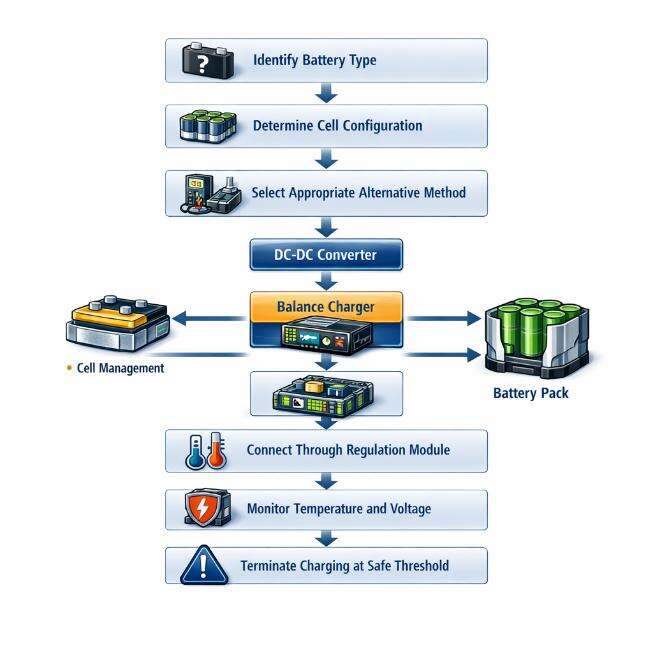
Ścisły protokół bezpieczeństwa powinien obejmować:
● Ciągłe monitorowanie temperatury
● Zastosowanie systemów zabezpieczających przed pożarem
● Unikanie ładowania bez nadzoru
● Weryfikacja parametrów napięcia i prądu
Te środki zmniejszają wrodzone ryzyko związane z magazynowaniem energii w akumulatorach litowych.
7. Środki awaryjne i gotowość operacyjna
Gdy nie ma dostępnego sprzętu do ładowania, najbardziej niezawodnymi rozwiązaniami są:
● Pożyczanie kompatybilnych ładowarek
● Odwiedzanie sklepów z artykułami dla miłośników modeli RC
● Korzystanie z publicznych lub profesjonalnych stacji ładowania
Długoterminowe strategie przygotowania obejmują posiadanie zapasowych ładowarek, noszenie power banków obsługujących standard Power Delivery (PD) oraz tworzenie modułowych zestawów do ładowania w terenie.
8. Podsumowanie
Ładowanie baterii drona bez oryginalnego ładowarki jest technicznie możliwe w określonych warunkach. Możliwość zastosowania alternatywnych metod zależy od obecności elektroniki ochronnej, dostępności źródeł zasilania z regulowanym napięciem oraz zrozumienia przez użytkownika zachowania się akumulatorów litowych. Dzięki zastosowaniu praktyk opartych na inżynierii i przestrzeganiu procedur bezpieczeństwa operatorzy UAV mogą zapewnić ciągłość operacyjną nawet w środowiskach o ograniczonych zasobach.
