
Abstract
De operationele continuïteit van onbemande luchtvaartuigen (UAV's) wordt fundamenteel beperkt door de beschikbaarheid en juiste onderhoudstoestand van hun aan boord geïnstalleerde elektrochemische energieopslagsystemen. Hoewel oorspronkelijke, door de fabrikant geleverde opladers zijn ontworpen om te voldoen aan de strenge eisen die gelden voor lithiumgebaseerde batterijchemieën, vinden praktijktoepassingen van UAV's vaak plaats in omgevingen waar dergelijke apparatuur niet beschikbaar is. Dit artikel ontwikkelt een systeemniveau analytisch kader om te begrijpen hoe dronebatterijen kunnen worden opgeladen wanneer de originele opladers ontbreken. Gebaseerd op beginselen uit de elektrochemie, vermogenselektronica en onderzoek naar energiebeheer bij UAV's, evalueert de studie alternatieve laadmethoden, bepaalt hun technische haalbaarheid en stelt de veiligheidsgrenzen vast waarbinnen dergelijke methoden verantwoord kunnen worden toegepast.
1. Inleiding
De snelle verspreiding van UAV-technologieën in wetenschappelijke, industriële en commerciële domeinen heeft de behoefte aan betrouwbare en aanpasbare energiebeheersstrategieën versterkt. Lithium-polymeer (LiPo) en lithium-ion (Li-ion)-batterijen — vanwege hun hoge specifieke energiedichtheid en gunstige ontladingskenmerken — blijven de dominante energiebronnen voor UAV-aandrijfsystemen. Deze batterijchemieën leggen echter strikte operationele beperkingen op, met name tijdens het opladen, waarbij afwijkingen van de voorgeschreven spanning, stroom of thermische omstandigheden onomkeerbare achteruitgang of catastrofale storingen kunnen veroorzaken.
Bij veldoperaties kunnen gebruikers van UAV's scenario's tegenkomen waarin het oorspronkelijke laadapparaat verloren is gegaan, beschadigd is of op andere wijze onbereikbaar is. De centrale uitdaging is daarom om te bepalen of alternatieve laadmechanismen de elektrochemische omgeving kunnen reproduceren die nodig is voor een veilige en efficiënte energieherstel. Dit artikel behandelt deze uitdaging door de theoretische grondslagen, technische vereisten en praktische beperkingen van niet-standaard laadmethoden te onderzoeken.
2. Elektrochemische en technische grondslagen van het laden van UAV-batterijen
2.1 Lithiumgebaseerde batterijchemieën
LiPo- en Li-ion-batterijen werken via omkeerbare lithium-ion-intercalatieprocessen. Hun prestaties en levensduur zijn afhankelijk van het handhaven van:
● Spanningsstabiliteit binnen smalle elektrochemische vensters
● Gecontroleerde stroomvoering om lithiumplating te voorkomen
● Thermisch evenwicht om versnelde SEI-afbraak te voorkomen
● Celbalans bij multi-celconfiguraties
Deze beperkingen zijn niet willekeurig; ze voortkomen uit de intrinsieke thermodynamica en kinetica van lithium-iontransport. Elke alternatieve laadmethode moet daarom de omstandigheden benaderen waarbinnen deze reacties veilig verlopen.
2.2 Het CC–CV-laadparadigma
Het standaardlaadprotocol voor lithiumgebaseerde batterijen is de methode met constante stroom–constante spanning (CC–CV). Tijdens de CC-fase wordt de batterij met een vaste stroom opgeladen totdat deze zijn maximale toegestane spanning bereikt. Tijdens de CV-fase wordt deze spanning gehandhaafd terwijl de stroom geleidelijk afneemt. Deze tweefasenbenadering minimaliseert de belasting op de elektrodematerialen en vermindert het risico op lithiumplating.
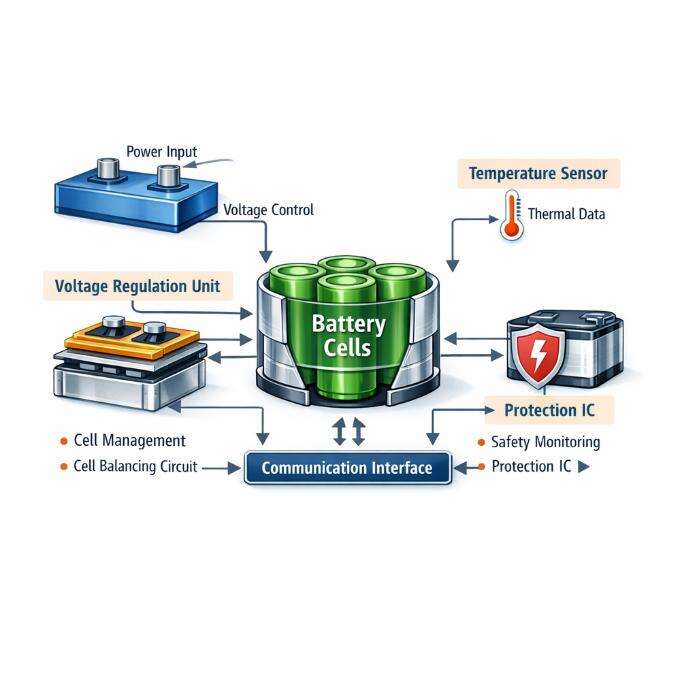
2.3 Batterijbeheersystemen (BMS)
Veel consumentendrones zijn uitgerust met slimme batterijen die zijn voorzien van BMS-modules die de volgende functies uitvoeren:
● Regelgeving van spanning en stroom in real time
● Thermisch bewaken
● Celbalancering
● Storingdetectie
De aanwezigheid van een BMS breidt het scala aan haalbare laadopties aanzienlijk uit, aangezien de batterij zelf onregelmatigheden in de externe stroombron kan compenseren.
3. Alternatieve laadmechanismen: een technische en analytische beoordeling
3.1 Universele balansladers
3.1.1 Functionele architectuur
Universele balansladers zijn microcontrollergebaseerde stroomconditioneringsapparaten die CC–CV-opladen kunnen uitvoeren terwijl ze tegelijkertijd de celspanningen egaliseren. Hun interne algoritmes passen stroom en spanning dynamisch aan om elektrochemische stabiliteit te behouden.
3.1.2 Technische voordelen
● Hoge nauwkeurigheid ten opzichte van de door de fabrikant gespecificeerde laadprofielen
● Geïntegreerde veiligheidsmechanismen
● Compatibiliteit met diverse batterijconfiguraties
Vanuit technisch oogpunt benadert deze methode het gedrag van OEM-laders het meest en is zij daarom het meest technisch verantwoord alternatief.
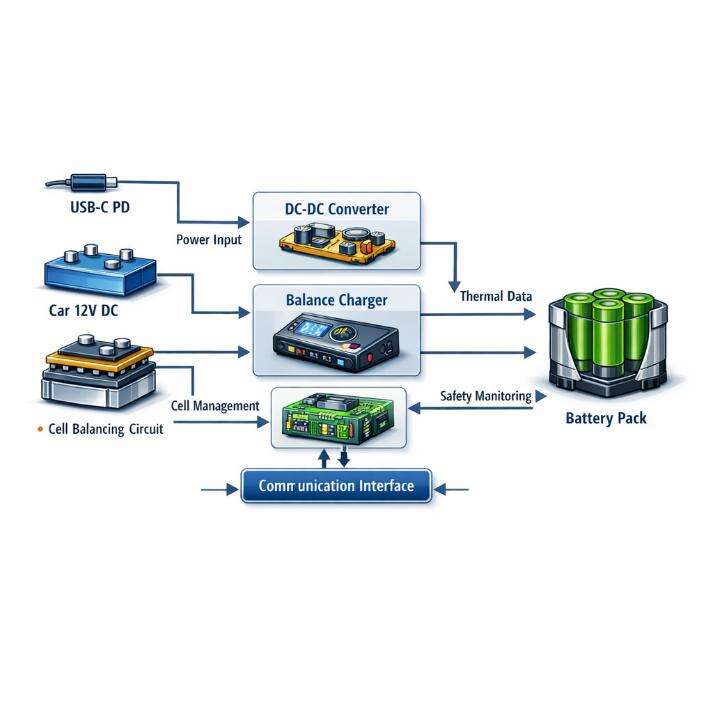
3.2 USB-C Power Delivery voor slimme accu's
3.2.1 Onderliggend mechanisme
USB-C PD ondersteunt van nature geen opladen van lithiumaccu's. In plaats daarvan zijn slimme accu's uitgerust met DC-DC-converters en beveiligingscircuits die de USB-ingang omzetten in een geregeld laadomgeving. De externe stroombron levert slechts energie; de interne elektronica van de accu beheert het laadproces.
3.2.2 Toepassingsbeperkingen
Deze methode is alleen geschikt voor accu's met ingebouwd BMS. Onbewerkte LiPo-pakketten beschikken niet over de benodigde regeling en kunnen daarom niet veilig via USB-gebaseerde systemen worden opgeladen.
3.3 In voertuigen geïntegreerde laadsystemen
3.3.1 Automobiel-elektrische infrastructuur
Auto's bieden een stabiele 12 V gelijkstroomvoorziening die met behulp van stroomomvormers kan worden omgezet in wisselstroom of geregeld gelijkstroom. Deze infrastructuur kan balansladers of voertuigspecifieke laders voor drones ondersteunen, waardoor voertuigen een praktisch mobiel laadplatform vormen.
3.3.2 Technische overwegingen
● Spanningsschommelingen moeten worden opgevangen
● Opladen met uitgeschakelde motor kan leiden tot het leeglopen van de voertuigbatterij
● Thermisch beheer blijft essentieel
3.4 Op zonne-energie gebaseerde oplaadarchitecturen
3.4.1 Fotovoltaïsche integratie
Zonnepanelen genereren een wisselende gelijkstroomuitvoer die afhankelijk is van de stralingsintensiteit. Wanneer gekoppeld aan een gereguleerde stroomvoorziening of omvormer, kunnen zij ondersteuning bieden bij het opladen van UAV-batterijen in afgelegen omgevingen.
3.4.2 Beperkingen
● Lage oplaadefficiëntie
● Afhankelijkheid van de omgeving
● Behoefte aan tussenliggende regelhardware
Zonne-energiegebaseerd opladen moet daarom vooral worden gezien als een aanvullende of noodoplaadmethode, en niet als een primaire oplaadstrategie.
3.5 Laboratoriumkwaliteit voedingen (uitsluitend voor experts)
3.5.1 Technische haalbaarheid
Programmeerbare gelijkstroomvoedingen kunnen CC–CV-opladen nabootsen indien ze met precisie zijn geconfigureerd. Ze beschikken echter niet over een celbalansfunctie, waardoor ze ongeschikt zijn voor meercelbatterijpakketten, tenzij ze worden gecombineerd met externe balanshardware.
3.5.2 Risicoanalyse
Vanwege de grote kans op verkeerde configuratie is deze methode uitsluitend geschikt voor gebruikers met formele opleiding op het gebied van vermoelektronica of elektrochemische techniek.
4. Oplaadmethoden die categorisch moeten worden uitgesloten
Verschillende geïmproviseerde oplaadtechnieken komen vaak voor in online discussies, maar ontberen wetenschappelijke geldigheid. Deze omvatten:
● Directe aansluiting op telefoon- of laptopladers
● Opladen via ongereguleerde gelijkstroombronnen
● Directe aansluiting van LiPo-pakketten op autoaccu’s
Dergelijke methoden schenden fundamentele electrochemische beperkingen en vormen ernstige veiligheidsrisico's, waaronder thermische ontlading en celbarsting.
5. Laadrendement en tijdsdynamiek
De laadduur wordt beïnvloed door:
● Batterijcapaciteit
● Beschikbaarheid van ingangsvermogen
● Rendement van de laadcircuitry
Balansladers behalen doorgaans het hoogste rendement, terwijl zonenergiesystemen het laagste rendement vertonen. USB-C PD neemt een tussenpositie in, voornamelijk beperkt door zijn maximale stroomafgifte.
6. Veiligheidskader voor niet-standaard opladen
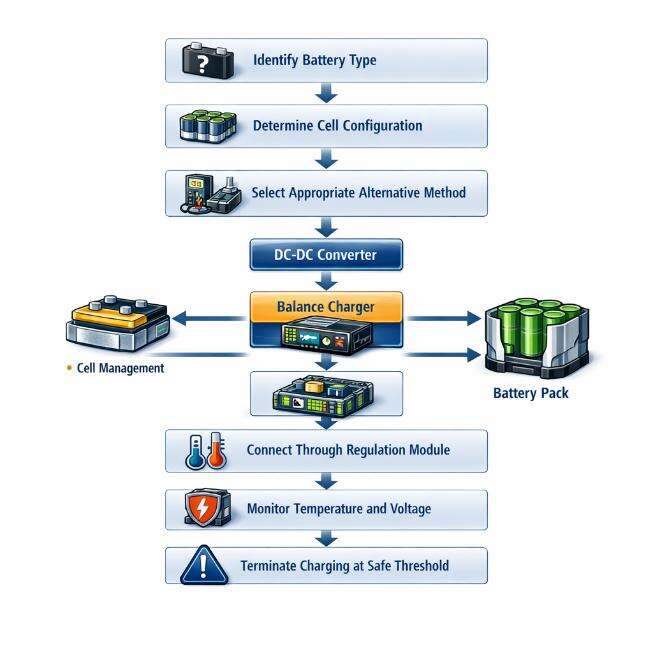
Een streng veiligheidsprotocol dient onder meer te omvatten:
● Voortdurende temperatuurbewaking
● Gebruik van vuurbestendige behoudsystemen
● Vermijden van onbeheerd opladen
● Verificatie van spanning- en stroomparameters
Deze maatregelen verminderen de inherente risico's die gepaard gaan met lithiumgebaseerde energieopslagsystemen.
7. Noodmaatregelen en operationele paraatheid
Wanneer er geen laadapparatuur beschikbaar is, zijn de meest betrouwbare oplossingen:
● Het lenen van compatibele laders
● Een bezoek aan RC-hobbywinkels
● Gebruik van openbare of professionele laadstations
Strategieën voor langetermijnparaatheid omvatten het onderhouden van redundante laders, het meenemen van PD- geschikte powerbanks en het samenstellen van modulaire veldlaadsets.
8. Conclusie
Het opladen van een dronebatterij zonder de originele lader is technisch haalbaar onder specifieke omstandigheden. De bruikbaarheid van alternatieve methoden hangt af van het aanwezig zijn van beschermende elektronica, de beschikbaarheid van gereguleerde stroombronnen en het begrip van de gebruiker van het gedrag van lithiumbatterijen. Door engineeringgebaseerde praktijken toe te passen en veiligheidsprotocollen na te leven, kunnen UAV-exploitanten operationele continuïteit behouden, zelfs in omgevingen met beperkte middelen.
