
ภาพย่อ
ความต่อเนื่องในการปฏิบัติงานของยานอากาศไร้คนขับ (UAV) ขึ้นอยู่โดยพื้นฐานกับการมีระบบจัดเก็บพลังงานไฟฟ้าเคมีบนตัวเครื่องให้พร้อมใช้งานและได้รับการบำรุงรักษาอย่างเหมาะสม แม้ว่าที่ชาร์จที่ผู้ผลิตจัดให้มานั้นจะถูกออกแบบมาเพื่อให้มั่นใจว่าสอดคล้องกับข้อกำหนดที่เข้มงวดสำหรับแบตเตอรี่ที่ใช้สารเคมีลิเธียม แต่ในทางปฏิบัติ การนำ UAV ไปใช้งานจริงมักเกิดขึ้นในสภาพแวดล้อมที่ไม่มีอุปกรณ์ดังกล่าวพร้อมใช้งาน บทความนี้พัฒนากรอบการวิเคราะห์ระดับระบบเพื่อทำความเข้าใจว่าแบตเตอรี่ของโดรนสามารถชาร์จใหม่ได้อย่างไรในกรณีที่ไม่มีที่ชาร์จต้นฉบับ โดยอาศัยหลักการจากสาขาวิชาเคมีไฟฟ้า อุปกรณ์อิเล็กทรอนิกส์กำลัง และงานวิจัยด้านการจัดการพลังงานของ UAV การศึกษานี้ประเมินเส้นทางการชาร์จทางเลือก ระบุความเป็นไปได้เชิงเทคนิคของแต่ละวิธี และกำหนดขอบเขตด้านความปลอดภัยที่จำเป็นสำหรับการใช้งานวิธีดังกล่าวอย่างรับผิดชอบ
1. บทนำ
การแพร่กระจายของเทคโนโลยีอากาศยานไร้คนขับ (UAV) ทั่วทั้งด้านวิทยาศาสตร์ อุตสาหกรรม และพาณิชยกรรม ได้ทำให้ความต้องการกลยุทธ์การจัดการพลังงานที่เชื่อถือได้และปรับตัวได้ดีขึ้นอย่างมาก แบตเตอรี่ลิเธียม-โพลิเมอร์ (LiPo) และแบตเตอรี่ลิเธียม-ไอออน (Li-ion) ซึ่งมีค่าพลังงานจำเพาะสูงและคุณสมบัติการปล่อยประจุที่เหมาะสม ยังคงเป็นแหล่งพลังงานหลักสำหรับระบบขับเคลื่อน UAV อย่างไรก็ตาม ปฏิกิริยาเคมีของแบตเตอรี่ทั้งสองชนิดนี้กำหนดข้อจำกัดในการใช้งานอย่างเข้มงวด โดยเฉพาะในระหว่างการชาร์จ ซึ่งหากเกิดการเบี่ยงเบนจากเงื่อนไขแรงดันไฟฟ้า กระแสไฟฟ้า หรืออุณหภูมิที่กำหนดไว้ อาจนำไปสู่การเสื่อมสภาพอย่างถาวร หรือความล้มเหลวอย่างรุนแรง
ในการปฏิบัติงานภาคสนาม ผู้ใช้โดรนอาจประสบสถานการณ์ที่อุปกรณ์ชาร์จต้นฉบับสูญหาย ชำรุด หรือไม่สามารถเข้าถึงได้ตามปกติ ดังนั้นความท้าทายหลักจึงอยู่ที่การพิจารณาว่า กลไกการชาร์จทางเลือกสามารถจำลองสภาพแวดล้อมเชิงไฟฟ้าเคมีที่จำเป็นสำหรับการเติมพลังงานอย่างปลอดภัยและมีประสิทธิภาพได้หรือไม่ บทความนี้จัดการกับความท้าทายนี้โดยการวิเคราะห์พื้นฐานเชิงทฤษฎี ข้อกำหนดด้านวิศวกรรม และข้อจำกัดเชิงปฏิบัติของวิธีการชาร์จที่ไม่ใช่มาตรฐาน
2. พื้นฐานเชิงไฟฟ้าเคมีและวิศวกรรมของการชาร์จแบตเตอรี่โดรน
2.1 สารเคมีแบตเตอรี่ที่ใช้ลิเธียม
แบตเตอรี่ LiPo และ Li-ion ทำงานผ่านกระบวนการแทรกซ้อนของไอออนลิเธียมแบบย้อนกลับได้ ประสิทธิภาพและความทนทานของแบตเตอรี่เหล่านี้ขึ้นอยู่กับการรักษาระดับต่อไปนี้:
● ความมั่นคงของแรงดันไฟฟ้าภายในขอบเขตไฟฟ้าเคมีที่แคบ
● การควบคุมกระแสไฟฟ้าให้อยู่ในระดับที่เหมาะสมเพื่อป้องกันการเกิดลิเธียมเคลือบ (lithium plating)
● สมดุลทางความร้อนเพื่อหลีกเลี่ยงการเสื่อมสภาพของชั้น SEI ที่เร่งตัว
● ความสมดุลของเซลล์ในระบบแบตเตอรี่แบบหลายเซลล์
ข้อจำกัดเหล่านี้ไม่ได้เกิดขึ้นโดยพลการ แต่เกิดจากเทอร์โมไดนามิกส์และจลนศาสตร์โดยธรรมชาติของการขนส่งไอออนลิเธียม ดังนั้นวิธีการชาร์จแบบทางเลือกใดๆ จึงจำเป็นต้องใกล้เคียงกับสภาวะที่ปฏิกิริยาเหล่านี้ดำเนินไปอย่างปลอดภัย
2.2 แนวทางการชาร์จแบบ CC–CV
โปรโตคอลการชาร์จมาตรฐานสำหรับแบตเตอรี่ที่ใช้ลิเธียมคือวิธีการชาร์จแบบกระแสคงที่–แรงดันคงที่ (CC–CV) ระหว่างขั้นตอน CC จะชาร์จแบตเตอรี่ด้วยกระแสไฟฟ้าคงที่จนถึงแรงดันสูงสุดที่ยอมรับได้ จากนั้นในขั้นตอน CV จะรักษาระดับแรงดันนี้ไว้ ในขณะที่กระแสไฟฟ้าลดลงอย่างค่อยเป็นค่อยไป แนวทางสองขั้นตอนนี้ช่วยลดความเครียดที่เกิดกับวัสดุอิเล็กโทรด และลดความเสี่ยงของการเกิดการสะสมของลิเธียม (lithium plating)
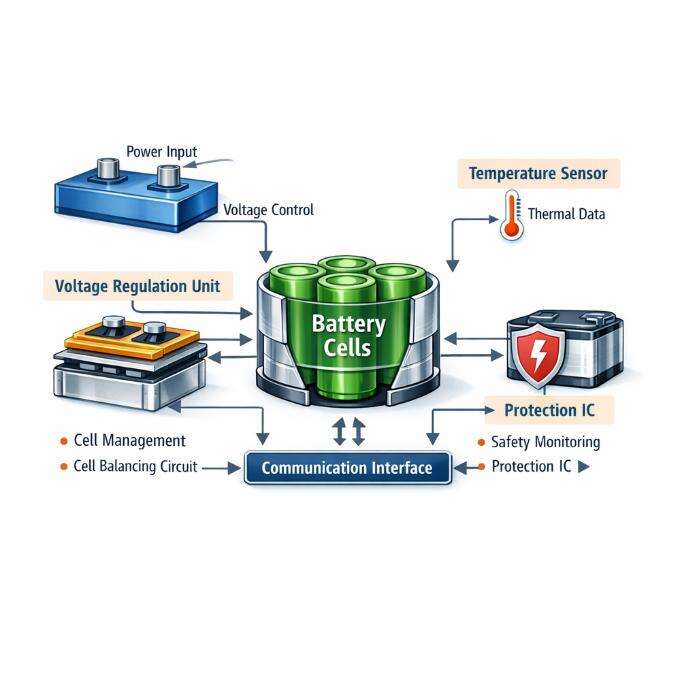
2.3 ระบบจัดการแบตเตอรี่ (BMS)
โดรนสำหรับผู้บริโภคหลายรุ่นมาพร้อมแบตเตอรี่อัจฉริยะที่มีโมดูล BMS ซึ่งทำหน้าที่ดังนี้:
● การควบคุมแรงดันและกระแสแบบเรียลไทม์
● การตรวจสอบอุณหภูมิ
● การสมดุลเซลล์
● การตรวจจับข้อผิดพลาด
การมีระบบจัดการแบตเตอรี่ (BMS) ช่วยขยายขอบเขตของทางเลือกในการชาร์จที่ใช้งานได้จริงอย่างมาก เนื่องจากแบตเตอรี่เองสามารถชดเชยความผิดปกติของแหล่งจ่ายไฟภายนอกได้
3. กลไกการชาร์จทางเลือก: การทบทวนเชิงเทคนิคและวิเคราะห์
3.1 ที่ชาร์จแบบสมดุลสากล
3.1.1 สถาปัตยกรรมการทำงาน
ที่ชาร์จแบบสมดุลสากลเป็นอุปกรณ์ปรับสภาพพลังงานที่ขับเคลื่อนด้วยไมโครคอนโทรลเลอร์ ซึ่งสามารถดำเนินการชาร์จแบบกระแสคงที่–แรงดันคงที่ (CC–CV) ไปพร้อมกันกับการปรับสมดุลแรงดันของเซลล์แต่ละเซลล์ อัลกอริธึมภายในจะปรับค่ากระแสและแรงดันแบบไดนามิกเพื่อรักษาเสถียรภาพทางอิเล็กโทรเคมี
3.1.2 ข้อดีเชิงเทคนิค
● ความแม่นยำสูงในการปฏิบัติตามโพรไฟล์การชาร์จที่ผู้ผลิตกำหนดไว้
● กลไกความปลอดภัยในตัว
● ความเข้ากันได้กับโครงสร้างแบตเตอรี่ที่หลากหลาย
จากมุมมองด้านวิศวกรรม วิธีนี้เลียนแบบพฤติกรรมของที่ชาร์จจากผู้ผลิตต้นฉบับ (OEM) ได้ใกล้เคียงที่สุด และจึงถือเป็นทางเลือกที่มีเหตุผลเชิงเทคนิคมากที่สุด
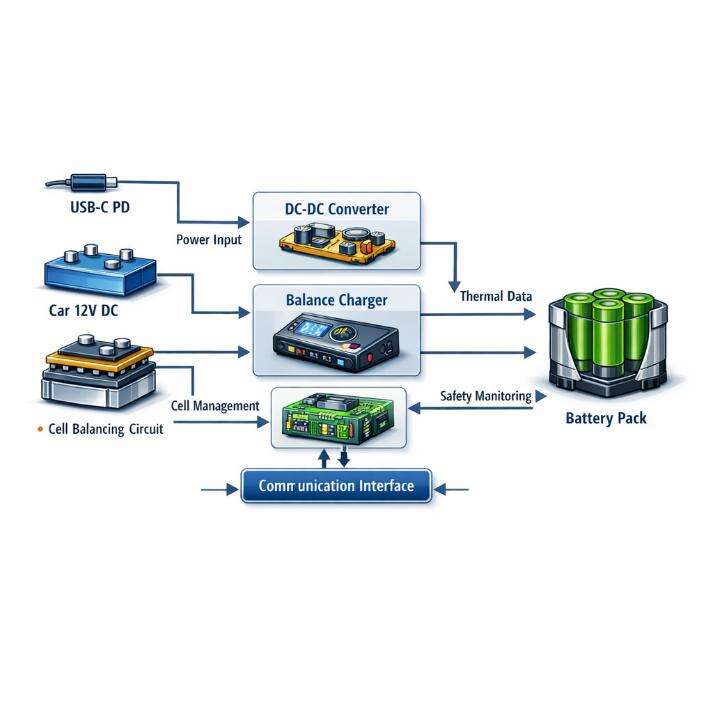
3.2 การส่งผ่านพลังงานผ่านพอร์ต USB-C สำหรับแบตเตอรี่อัจฉริยะ
3.2.1 กลไกพื้นฐาน
การส่งผ่านพลังงานผ่านพอร์ต USB-C (USB-C PD) ไม่รองรับการชาร์จแบตเตอรี่ลิเธียมโดยธรรมชาติ แต่แบตเตอรี่อัจฉริยะจะมีวงจรแปลงแรงดันแบบ DC-DC และวงจรป้องกันในตัว ซึ่งทำหน้าที่แปลงพลังงานขาเข้าจากพอร์ต USB ให้เป็นสภาวะแวดล้อมสำหรับการชาร์จที่มีการควบคุมอย่างแม่นยำ แหล่งจ่ายไฟภายนอกทำหน้าที่เพียงจัดหาพลังงานเท่านั้น ในขณะที่อุปกรณ์อิเล็กทรอนิกส์ภายในแบตเตอรี่เป็นผู้ควบคุมกระบวนการชาร์จทั้งหมด
3.2.2 ข้อจำกัดด้านการใช้งาน
วิธีนี้สามารถใช้งานได้เฉพาะกับแบตเตอรี่ที่มีระบบจัดการแบตเตอรี่ในตัว (BMS) เท่านั้น ส่วนแพ็คแบตเตอรี่ลิเธียมโพลิเมอร์ (LiPo) แบบเปล่า (raw LiPo packs) ขาดกลไกการควบคุมที่จำเป็น จึงไม่สามารถชาร์จผ่านระบบแบบ USB ได้อย่างปลอดภัย
3.3 ระบบการชาร์จที่รวมอยู่ภายในยานพาหนะ
3.3.1 โครงสร้างพื้นฐานระบบไฟฟ้าของยานยนต์
รถยนต์จัดให้มีแหล่งจ่ายไฟกระแสตรง (DC) ที่เสถียรระดับ 12 โวลต์ ซึ่งสามารถแปลงเป็นไฟกระแสสลับ (AC) หรือกระแสตรงที่มีการควบคุมแรงดันแล้วได้ โดยใช้เครื่องแปลงพลังงาน (power inverters) โครงสร้างพื้นฐานนี้สามารถรองรับเครื่องชาร์จแบบสมดุล (balance chargers) หรือเครื่องชาร์จสำหรับโดรนที่ออกแบบมาเฉพาะสำหรับใช้ในรถยนต์ ทำให้ยานพาหนะกลายเป็นแพลตฟอร์มการชาร์จแบบเคลื่อนที่ที่ใช้งานได้จริง
3.3.2 ข้อพิจารณาด้านวิศวกรรม
● ต้องลดผลกระทบจากความผันผวนของแรงดันไฟฟ้า
● การชาร์จขณะเครื่องยนต์ดับอาจทำให้แบตเตอรี่ของยานพาหนะลดลงจนหมด
● การจัดการความร้อนยังคงมีความจำเป็นอย่างยิ่ง
3.4 สถาปัตยกรรมการชาร์จที่ขับเคลื่อนด้วยพลังงานแสงอาทิตย์
3.4.1 การผสานระบบเซลล์แสงอาทิตย์
แผงโซลาร์เซลล์สร้างกระแสตรง (DC) ที่มีค่าแปรผันตามความเข้มของรังสีแสงแดด เมื่อเชื่อมต่อกับสถานีจ่ายไฟที่ควบคุมแรงดันหรือตัวแปลงไฟที่มีการควบคุมอย่างเหมาะสม สามารถสนับสนุนการชาร์จแบตเตอรี่ของอากาศยานไร้คนขับ (UAV) ในสภาพแวดล้อมที่ห่างไกลได้
3.4.2 ข้อจำกัด
● ประสิทธิภาพการชาร์จต่ำ
● ขึ้นอยู่กับสภาพแวดล้อม
● ต้องใช้อุปกรณ์ควบคุมแรงดันระดับกลาง
ดังนั้น การชาร์จแบบใช้พลังงานแสงอาทิตย์จึงควรเข้าใจว่าเป็นกลไกเสริมหรือกลไกสำรองในกรณีฉุกเฉิน มากกว่าจะเป็นกลยุทธ์หลักสำหรับการชาร์จ
3.5 แหล่งจ่ายไฟระดับห้องปฏิบัติการ (ใช้ได้เฉพาะผู้เชี่ยวชาญเท่านั้น)
3.5.1 ความเป็นไปได้ทางเทคนิค
แหล่งจ่ายไฟแบบกระแสตรงที่สามารถเขียนโปรแกรมได้สามารถเลียนแบบโหมดการชาร์จแบบ CC–CV ได้ หากตั้งค่าด้วยความแม่นยำ อย่างไรก็ตาม อุปกรณ์เหล่านี้ไม่มีความสามารถในการปรับสมดุลเซลล์ จึงไม่เหมาะสมสำหรับแบตเตอรี่แบบหลายเซลล์ เว้นแต่จะใช้ร่วมกับฮาร์ดแวร์ปรับสมดุลภายนอก
3.5.2 การประเมินความเสี่ยง
เนื่องจากมีโอกาสสูงที่จะตั้งค่าผิดพลาด วิธีนี้จึงเหมาะสมเฉพาะผู้ใช้ที่มีการฝึกอบรมอย่างเป็นทางการด้านอุปกรณ์อิเล็กทรอนิกส์กำลังหรือวิศวกรรมอิเล็กโทรเคมีเท่านั้น
4. วิธีการชาร์จที่ควรยกเลิกโดยเด็ดขาด
มีเทคนิคการชาร์จแบบประดิษฐ์ขึ้นหลายแบบที่มักปรากฏในบทสนทนาออนไลน์ แต่ขาดหลักฐานเชิงวิทยาศาสตร์รองรับ ซึ่งประกอบด้วย:
● การต่อโดยตรงเข้ากับที่ชาร์จโทรศัพท์มือถือหรือแล็ปท็อป
● การชาร์จผ่านแหล่งจ่ายไฟแบบกระแสตรงที่ไม่มีการควบคุม
● การต่อแบตเตอรี่ LiPo โดยตรงเข้ากับแบตเตอรี่รถยนต์
วิธีการดังกล่าวขัดต่อข้อจำกัดพื้นฐานด้านอิเล็กโทรเคมี และก่อให้เกิดอันตรายต่อความปลอดภัยอย่างรุนแรง รวมถึงภาวะความร้อนล้น (thermal runaway) และการระเบิดของเซลล์
5. ประสิทธิภาพในการชาร์จและพลวัตเชิงเวลา
ระยะเวลาในการชาร์จได้รับอิทธิพลจาก:
● ความจุของแบตเตอรี่
● ความสามารถในการจ่ายกำลังไฟฟ้าเข้า
● ประสิทธิภาพของวงจรชาร์จ
เครื่องชาร์จแบบสมดุล (balance chargers) มักมีประสิทธิภาพสูงสุด ขณะที่ระบบพลังงานแสงอาทิตย์มีประสิทธิภาพต่ำที่สุด ส่วนมาตรฐาน USB-C PD อยู่ในระดับปานกลาง โดยถูกจำกัดหลักๆ จากเพดานการส่งกำลังไฟฟ้า (power-delivery ceiling)
6. โครงสร้างความปลอดภัยสำหรับการชาร์จแบบไม่มาตรฐาน
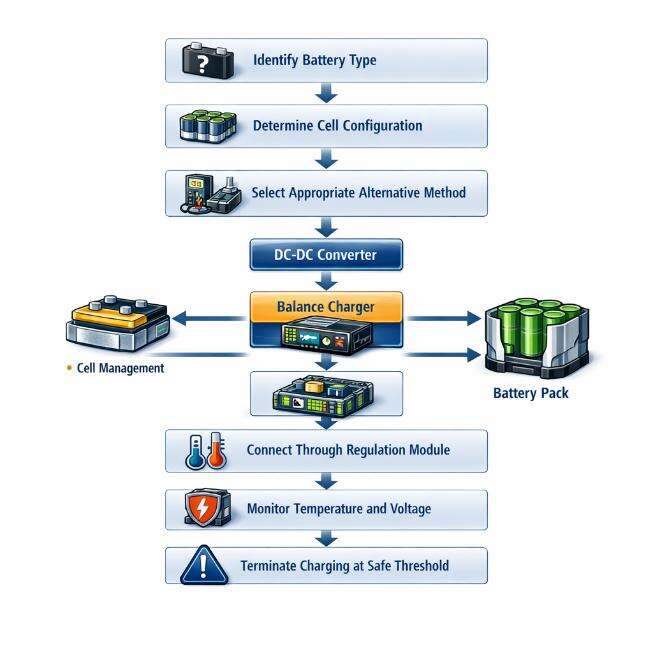
ควรกำหนดโปรโตคอลความปลอดภัยอย่างเข้มงวด ซึ่งรวมถึง:
● การตรวจสอบอุณหภูมิอย่างต่อเนื่อง
● การใช้ระบบบรรจุที่ทนไฟ
● หลีกเลี่ยงการชาร์จโดยไม่มีผู้ดูแล
● การตรวจสอบพารามิเตอร์แรงดันไฟฟ้าและกระแสไฟฟ้า
มาตรการเหล่านี้ช่วยลดความเสี่ยงโดยธรรมชาติที่เกี่ยวข้องกับระบบจัดเก็บพลังงานที่ใช้ลิเธียม
7. มาตรการฉุกเฉินและความพร้อมในการปฏิบัติงาน
เมื่อไม่มีอุปกรณ์ชาร์จพร้อมใช้งาน วิธีแก้ไขที่น่าเชื่อถือที่สุด ได้แก่:
● การยืมเครื่องชาร์จที่เข้ากันได้
● การไปเยี่ยมชมร้านขายอุปกรณ์สำหรับรถบังคับวิทยุ (RC hobby shops)
● การใช้สถานีชาร์จสาธารณะหรือสถานีชาร์จแบบมืออาชีพ
กลยุทธ์ในการเตรียมความพร้อมระยะยาว ได้แก่ การรักษาเครื่องชาร์จสำรองไว้ การพกพาแบตเตอรี่สำรองที่รองรับเทคโนโลยี Power Delivery (PD) และการจัดชุดอุปกรณ์ชาร์จแบบโมดูลาร์สำหรับใช้งานภาคสนาม
8. สรุป
การชาร์จแบตเตอรี่โดรนโดยไม่ใช้ที่ชาร์จดั้งเดิมเป็นไปได้ทางเทคนิคภายใต้เงื่อนไขเฉพาะ ความเหมาะสมของวิธีการทางเลือกขึ้นอยู่กับการมีวงจรป้องกันอิเล็กทรอนิกส์ การมีแหล่งจ่ายไฟที่ควบคุมได้อย่างแม่นยำ และความเข้าใจของผู้ใช้เกี่ยวกับพฤติกรรมของแบตเตอรี่ลิเธียม โดยการนำหลักปฏิบัติด้านวิศวกรรมมาประยุกต์ใช้และยึดมั่นในมาตรการความปลอดภัย ผู้ปฏิบัติงานยานบินไร้คนขับ (UAV) สามารถรักษาความต่อเนื่องในการปฏิบัติงานได้ แม้ในสภาพแวดล้อมที่มีทรัพยากรจำกัด
