
抽象
無人航空機(UAV)の運用継続性は、基本的に、機載の電気化学エネルギー貯蔵システムの供給状況および適切な保守管理に制約される。メーカーが提供する充電器は、リチウム系電池の化学的特性に対する厳格な要件を満たすよう設計されているが、実際のUAV運用現場では、こうした機器が利用できない環境下で運用が行われることが頻繁にある。本論文では、純正充電器が使用できない状況においてドローン用バッテリーを再充電する方法を理解するための、システムレベルにおける分析的枠組みを構築する。電気化学、パワーエレクトロニクス、およびUAVエネルギー管理に関する研究の知見を基に、代替的な充電手法を評価し、その技術的実現可能性を明らかにするとともに、これらの手法を責任を持って適用可能な安全限界を明確に規定する。
1. はじめに
科学、産業、商業の各分野における無人航空機(UAV)技術の急速な普及に伴い、信頼性が高くかつ柔軟なエネルギー管理戦略への需要が高まっています。リチウムポリマー(LiPo)電池およびリチウムイオン(Li-ion)電池は、高い質量エネルギー密度と優れた放電特性を有することから、UAV推進システムにおいて依然として主流の電源となっています。しかし、これらの電池化学系には、特に充電時において厳格な運用制約が課されており、規定された電圧、電流、あるいは温度条件から逸脱すると、不可逆的な劣化や重大な故障を引き起こす可能性があります。
現場運用において、UAVユーザーは、元の充電装置を紛失・損傷した場合や、何らかの理由でアクセスできない状況に直面することがあります。したがって、本件における中心的な課題は、代替充電機構が、安全かつ効率的なエネルギー補給に必要な電気化学的環境を再現できるかどうかを明らかにすることです。本論文では、この課題に対処するため、非標準的な充電手法の理論的基盤、工学的要件、および実用上の制約について検討します。
2. UAVバッテリー充電の電気化学的および工学的基盤
2.1 リチウム系バッテリーの化学組成
LiPo(リチウムポリマー)およびLi-ion(リチウムイオン)バッテリーは、可逆的なリチウムイオン挿入脱離プロセスによって動作します。その性能および寿命は、以下の条件を維持することに依存します。
● 狭い電気化学的ウィンドウ内での電圧安定性
● リチウム析出を防止するための制御された電流供給
● 加速されたSEI(固体電解質界面)劣化を回避するための熱的平衡
● 多セル構成におけるセル間バランス
これらの制約は恣意的なものではなく、リチウムイオンの移動に固有の熱力学および反応速度論から生じるものである。したがって、代替的な充電方法は、これらの反応が安全に進行する条件をできる限り近似しなければならない。
2.2 CC–CV充電パラダイム
リチウム系電池における標準的な充電プロトコルは、定電流–定電圧(CC–CV)方式である。CC段階では、電池に一定の電流を流し続け、最大許容電圧に達するまで充電する。その後のCV段階では、この電圧を維持しつつ、電流を徐々に減少させる。この二段階方式により、電極材料へのストレスが最小限に抑えられ、リチウム析出のリスクも低減される。
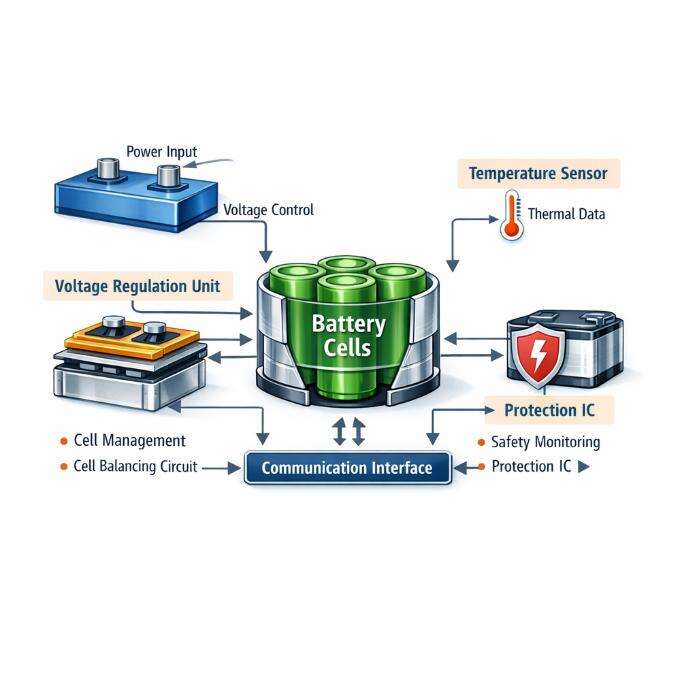
2.3 バッテリーマネジメントシステム(BMS)
多くの民生用UAVには、BMSモジュールを内蔵したスマートバッテリーが採用されており、以下の機能を実行する。
● 実時間での電圧および電流制御
● 温度監視
● セルバランス調整
● 異常検出
BMSの存在により、外部電源の不規則性をバッテリー自体が補償できるため、実用可能な充電方法の選択肢が大幅に広がります。
3. 代替充電メカニズム:技術的・分析的レビュー
3.1 ユニバーサルバランスチャージャー
3.1.1 機能アーキテクチャ
ユニバーサルバランスチャージャーは、マイクロコントローラーを基盤とする電力調整装置であり、CC–CV充電を実行すると同時にセル電圧の均等化も行います。その内部アルゴリズムは、電気化学的安定性を維持するために、電流および電圧を動的に調整します。
3.1.2 技術的優位性
● 製造元が指定する充電プロファイルへの高精度な準拠
● 統合型安全機構
● 多様なバッテリー構成への対応性
工学的観点から見ると、この手法はOEM充電器の動作を最も忠実に再現しており、したがって技術的に最も正当化可能な代替手段です。
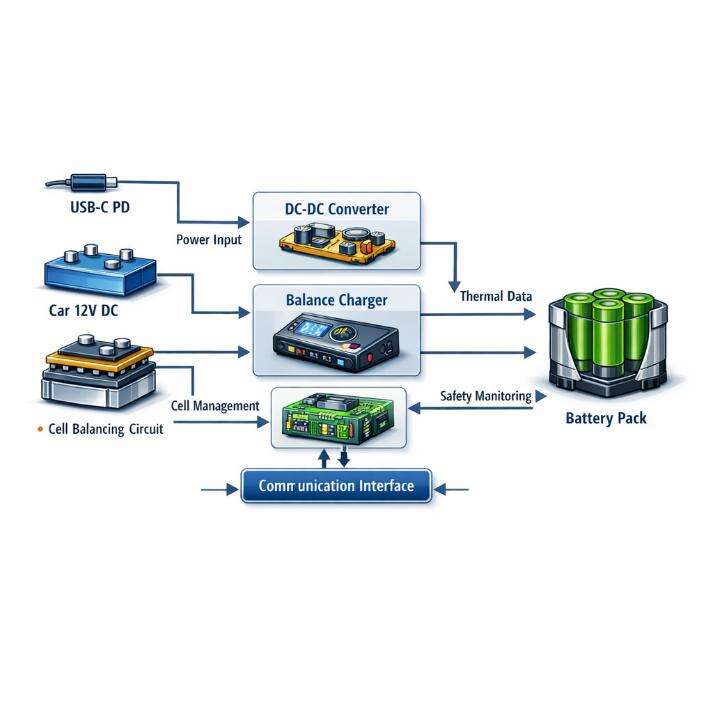
3.2 スマートバッテリー向けUSB-C電力供給(Power Delivery)
3.2.1 基盤となる動作メカニズム
USB-C PDは、リチウム電池の充電を本質的にサポートしていません。代わりに、スマートバッテリーにはDC-DCコンバーターおよび保護回路が内蔵されており、USB入力を制御された充電環境へと変換します。外部電源は単にエネルギーを供給するのみであり、充電プロセスそのものはバッテリー内部の電子回路によって制御されます。
3.2.2 適用上の制約
この方法は、内蔵BMS(バッテリーマネジメントシステム)を備えたバッテリーにのみ適用可能です。生のLiPoパックには必要な制御機能が欠けており、USBベースのシステムによる安全な充電はできません。
3.3 車両統合型充電システム
3.3.1 自動車の電気インフラストラクチャー
自動車は安定した12 V DC電源を提供し、電力インバーターを用いてACまたは制御されたDCへと変換できます。このインフラストラクチャーにより、バランス充電器やドローン専用車載充電器を駆動することが可能であり、車両を実用的なモバイル充電プラットフォームとして活用できます。
3.3.2 エンジニアリング上の検討事項
● 電圧変動は抑制しなければならない
● エンジン停止中の充電は、車両バッテリーの過放電を引き起こすリスクがある
● 熱管理は依然として不可欠である
3.4 太陽光駆動充電アーキテクチャ
3.4.1 光伏発電(PV)の統合
太陽光パネルは、照度に応じて変動する直流(DC)出力を生成する。規制された電源ステーションまたはコンバーターと組み合わせることで、遠隔地における無人航空機(UAV)バッテリーの充電を支援できる。
3.4.2 限界
● 充電効率が低い
● 環境条件への依存性
● 中間段階の電力調整ハードウェアが必要
したがって、太陽光による充電は、主たる充電戦略ではなく、補助的あるいは緊急時用の充電手段として位置づけるのが最も適切である。
3.5 ラボグレードの電源装置(専門家向け)
3.5.1 技術的実現可能性
プログラマブルDC電源装置は、高精度に設定することで定電流–定電圧(CC–CV)充電を模倣できます。ただし、セルバランス機能を備えていないため、外部のバランスハードウェアと併用しない限り、多セルパックへの使用には不適です。
3.5.2 リスク評価
誤設定の可能性が極めて高いため、この方法は、電力電子工学または電気化学工学に関する正式な教育を受けたユーザーのみが使用することを推奨します。
4. 明確に除外すべき充電方法
オンライン上の議論では、しばしばいくつかの即席の充電手法が登場しますが、これらは科学的根拠を欠いています。該当する例は以下のとおりです:
● スマートフォンやノートパソコンの充電器への直接接続
● 無調整DC電源による充電
● LiPoパックを自動車用バッテリーに直接接続
このような手法は、基本的な電気化学的制約に違反し、熱暴走やセルの破裂を含む深刻な安全上の危険を引き起こします。
5. 充電効率および時間的ダイナミクス
充電時間は以下の要因によって影響を受けます:
● バッテリー容量
● 入力電力の供給状況
● 充電回路の効率
バランス充電器は通常、最も高い効率を達成しますが、太陽光発電ベースのシステムは最も低い効率を示します。USB-C PDは中間的な位置を占め、その主な制約は電力供給能力の上限にあります。
6. 非標準充電のための安全フレームワーク
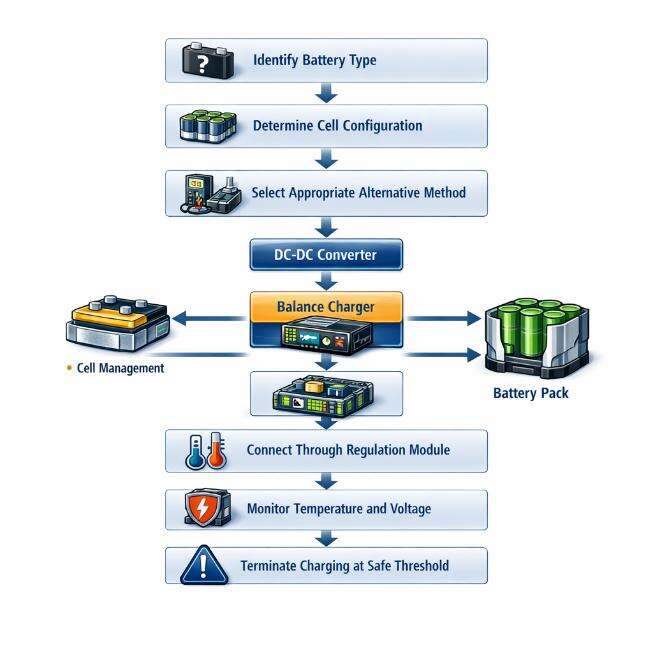
厳格な安全プロトコルには、以下を含める必要があります:
● 継続的な温度監視
● 耐火性の囲い込みシステムの使用
● 充電中の無人状態を避けること
● 電圧および電流パラメーターの確認
これらの対策により、リチウム系エネルギー貯蔵に固有のリスクが軽減されます。
7. 緊急時対応および運用準備
充電機器が利用できない場合、最も信頼性の高い解決策は以下のとおりです:
● 互換性のある充電器を借用すること
● RC(ラジオコントロール)ホビーショップを訪問すること
● 公共または専門の充電ステーションを利用すること
長期的な準備戦略には、予備の充電器を常備すること、PD対応のモバイルバッテリーを携行すること、およびモジュラー式の現場用充電キットを組み立てておくことが含まれます。
8. 結論
ドローンのバッテリーを純正充電器を使わずに充電することは、特定の条件下で技術的に可能です。代替方法の実用性は、保護用電子回路の有無、安定化された電源の入手可能性、およびユーザーがリチウム電池の特性をどの程度理解しているかに依存します。工学的な知見に基づいた手法を採用し、安全プロトコルを厳守することで、UAV運用者は資源が制約された環境においても運用の継続性を維持できます。
