
Resumen
La continuidad operativa de los vehículos aéreos no tripulados (UAV, por sus siglas en inglés) está fundamentalmente limitada por la disponibilidad y el mantenimiento adecuado de sus sistemas embarcados de almacenamiento electroquímico de energía. Aunque los cargadores suministrados por el fabricante están diseñados para garantizar el cumplimiento de los rigurosos requisitos de las químicas de baterías basadas en litio, las implementaciones reales de UAV con frecuencia tienen lugar en entornos donde dicho equipo no está disponible. Este artículo desarrolla un marco analítico a nivel de sistema para comprender cómo pueden recargarse las baterías de drones en ausencia de sus cargadores originales. Basándose en principios de electroquímica, electrónica de potencia e investigación sobre gestión energética en UAV, el estudio evalúa vías alternativas de carga, identifica su viabilidad técnica y delimita los límites de seguridad dentro de los cuales dichos métodos pueden emplearse de forma responsable.
1. Introducción
La proliferación de las tecnologías de vehículos aéreos no tripulados (UAV) en los ámbitos científico, industrial y comercial ha intensificado la necesidad de estrategias fiables y adaptables de gestión energética. Las baterías de polímero de litio (LiPo) y de iones de litio (Li-ion), debido a su elevada energía específica y sus favorables características de descarga, siguen siendo las fuentes de alimentación dominantes para los sistemas de propulsión de UAV. Sin embargo, estas químicas imponen restricciones operativas estrictas, especialmente durante la carga, donde desviaciones respecto a las condiciones prescritas de tensión, corriente o temperatura pueden provocar una degradación irreversible o un fallo catastrófico.
En operaciones de campo, los usuarios de UAV pueden encontrarse con escenarios en los que el dispositivo de carga original se ha perdido, dañado o, de otro modo, es inaccesible. El desafío principal consiste, por tanto, en determinar si mecanismos alternativos de carga pueden replicar el entorno electroquímico necesario para una recarga segura y eficiente de energía. Este artículo aborda dicho desafío mediante el análisis de los fundamentos teóricos, los requisitos de ingeniería y las limitaciones prácticas de los métodos de carga no convencionales.
2. Fundamentos electroquímicos e ingenieriles de la carga de baterías para UAV
2.1 Químicas de baterías basadas en litio
Las baterías LiPo y Li-ion funcionan mediante procesos reversibles de intercalación de iones de litio. Su rendimiento y durabilidad dependen del mantenimiento de:
● Estabilidad de tensión dentro de ventanas electroquímicas estrechas
● Flujo de corriente controlado para evitar la formación de depósitos de litio
● Equilibrio térmico para evitar una degradación acelerada de la capa SEI
● Equilibrio entre celdas en configuraciones de múltiples celdas
Estas restricciones no son arbitrarias; surgen de la termodinámica y la cinética intrínsecas del transporte de iones de litio. Por lo tanto, cualquier método alternativo de carga debe aproximar las condiciones bajo las cuales estas reacciones proceden de forma segura.
2.2 El paradigma de carga CC–CV
El protocolo de carga canónico para baterías basadas en litio es el método de Corriente Constante–Tensión Constante (CC–CV). Durante la fase CC, la batería se carga a una corriente fija hasta que alcanza su tensión máxima admisible. A continuación, en la fase CV, se mantiene dicha tensión mientras la corriente disminuye gradualmente. Este enfoque de dos fases minimiza el estrés sobre los materiales de los electrodos y reduce el riesgo de deposición de litio.
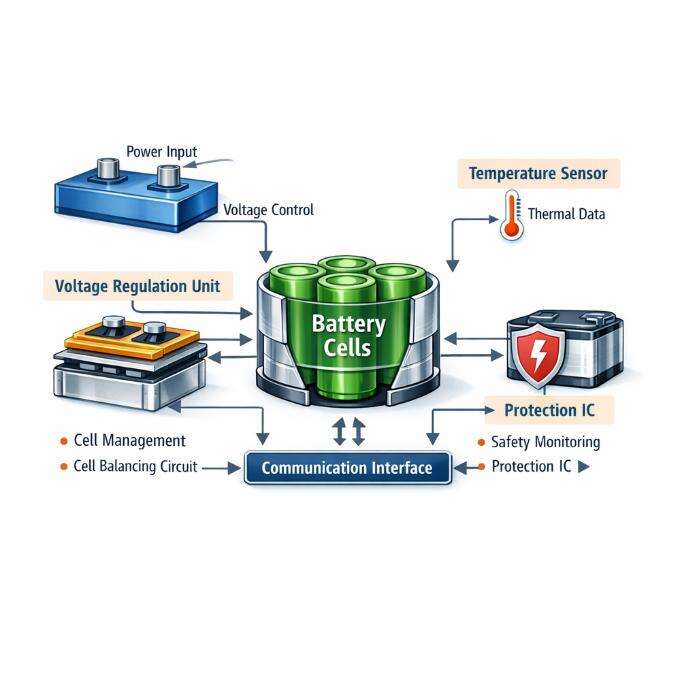
2.3 Sistemas de gestión de baterías (BMS)
Muchos UAV comerciales incorporan baterías inteligentes equipadas con módulos BMS que realizan:
● Regulación en tiempo real de la tensión y la corriente
● Supervisión térmica
● Equilibrado de celdas
● Detección de fallos
La presencia de un BMS amplía significativamente el rango de alternativas de carga viables, ya que la propia batería puede compensar las irregularidades de la fuente de alimentación externa.
3. Mecanismos alternativos de carga: una revisión técnica y analítica
3.1 Cargadores universales equilibrados
3.1.1 Arquitectura funcional
Los cargadores universales equilibrados son dispositivos microcontrolados de acondicionamiento de potencia capaces de ejecutar la carga CC–CV mientras igualan simultáneamente los voltajes de las celdas. Sus algoritmos internos ajustan dinámicamente la corriente y el voltaje para mantener la estabilidad electroquímica.
3.1.2 Ventajas técnicas
● Alta fidelidad respecto a los perfiles de carga especificados por el fabricante
● Mecanismos de seguridad integrados
● Compatibilidad con diversas configuraciones de baterías
Desde un punto de vista ingenieril, este método reproduce con mayor fidelidad el comportamiento de los cargadores OEM y, por tanto, constituye la alternativa más técnicamente justificable.
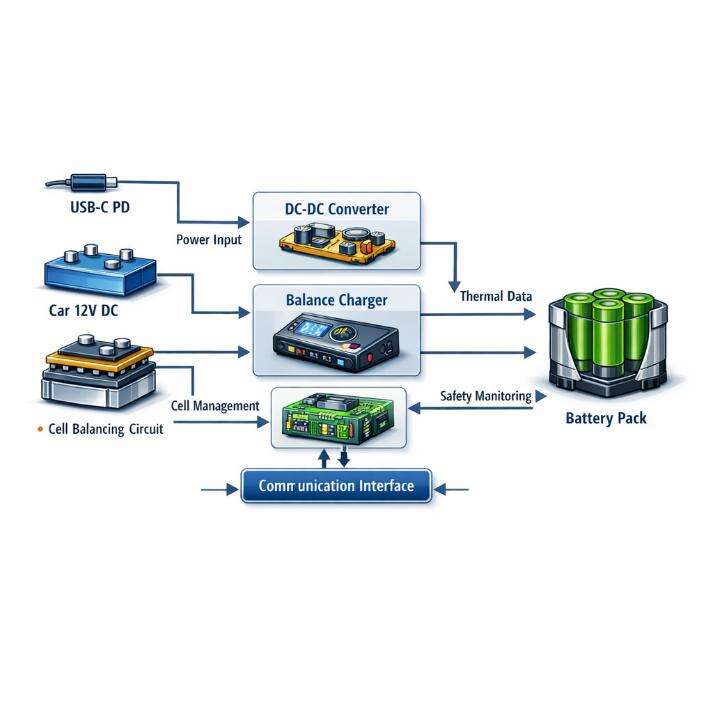
3.2 Entrega de energía USB-C para baterías inteligentes
3.2.1 Mecanismo subyacente
La tecnología USB-C PD no admite intrínsecamente la carga de baterías de litio. En su lugar, las baterías inteligentes incorporan convertidores CC-CC y circuitos de protección que transforman la entrada USB en un entorno de carga regulado. La fuente de alimentación externa simplemente suministra energía; los circuitos electrónicos internos de la batería controlan el proceso de carga.
3.2.2 Restricciones de aplicabilidad
Este método es viable únicamente para baterías con sistema de gestión de baterías (BMS) integrado. Los paquetes de LiPo sin procesar carecen de la regulación necesaria y, por lo tanto, no pueden cargarse de forma segura mediante sistemas basados en USB.
3.3 Sistemas de carga integrados en vehículos
3.3.1 Infraestructura eléctrica automotriz
Los automóviles proporcionan una fuente de alimentación estable de 12 V CC que puede convertirse en CA o en CC regulada mediante inversores de potencia. Esta infraestructura puede soportar cargadores equilibrados o cargadores específicos para drones diseñados para automóvil, convirtiendo así a los vehículos en una plataforma móvil práctica para la carga.
3.3.2 Consideraciones de ingeniería
● Las fluctuaciones de voltaje deben mitigarse
● La carga con el motor apagado puede agotar la batería del vehículo
● La gestión térmica sigue siendo esencial
3.4 Arquitecturas de carga impulsadas por energía solar
3.4.1 Integración fotovoltaica
Los paneles solares generan una salida de corriente continua (CC) variable, dependiente de la irradiación. Cuando se combinan con una estación de energía regulada o un convertidor, pueden respaldar la carga de la batería de UAV en entornos remotos.
3.4.2 Limitaciones
● Baja eficiencia de carga
● Dependencia ambiental
● Necesidad de hardware regulador intermedio
La carga basada en energía solar debe considerarse, por tanto, como un mecanismo complementario o de uso de emergencia, y no como una estrategia principal de carga.
3.5 Fuentes de alimentación de grado de laboratorio (solo para uso experto)
3.5.1 Factibilidad técnica
Las fuentes de alimentación de CC programables pueden emular la carga CC–CV si se configuran con precisión. Sin embargo, carecen de capacidad de equilibrado de celdas, lo que las hace inadecuadas para paquetes de múltiples celdas, a menos que se combinen con hardware externo de equilibrado.
3.5.2 Evaluación de riesgos
Debido a la alta probabilidad de configuración incorrecta, este método es adecuado únicamente para usuarios con formación formal en electrónica de potencia o ingeniería electroquímica.
4. Métodos de carga que deben excluirse taxativamente
Varios métodos improvisados de carga aparecen con frecuencia en discusiones en línea, pero carecen de validez científica. Entre ellos se incluyen:
● Conexión directa a cargadores de teléfono móvil o portátil
● Carga mediante fuentes de CC no reguladas
● Conexión directa de paquetes LiPo a baterías automotrices
Dichos métodos violan restricciones electroquímicas fundamentales y suponen graves riesgos para la seguridad, incluyendo la inestabilidad térmica y la ruptura de la celda.
5. Eficiencia de carga y dinámica temporal
La duración de la carga depende de:
● Capacidad de la batería
● Disponibilidad de potencia de entrada
● Eficiencia del circuito de carga
Los cargadores equilibrados suelen alcanzar la mayor eficiencia, mientras que los sistemas basados en energía solar presentan la menor. USB-C PD ocupa una posición intermedia, limitado principalmente por su límite máximo de entrega de potencia.
6. Marco de seguridad para la carga no estándar
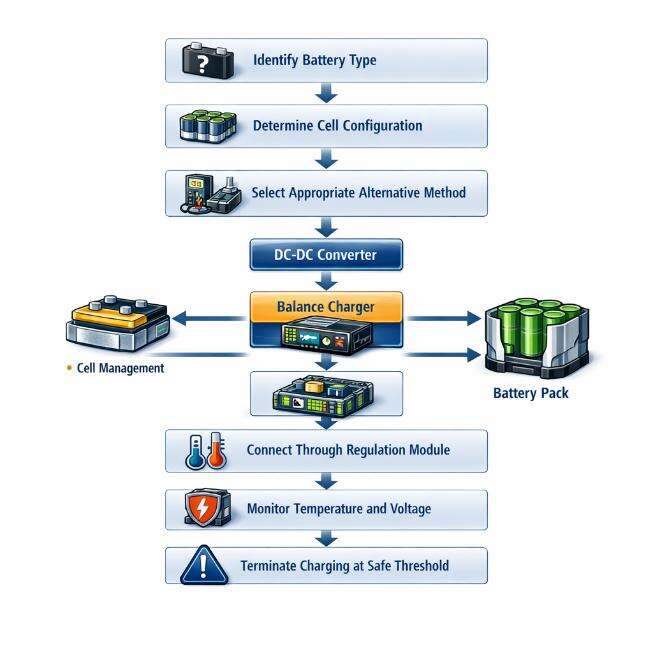
Un protocolo riguroso de seguridad debería incluir:
● Monitorización térmica continua
● Uso de sistemas de contención resistentes al fuego
● Evitar la carga sin supervisión
● Verificación de los parámetros de tensión y corriente
Estas medidas reducen los riesgos inherentes asociados al almacenamiento de energía basado en litio.
7. Medidas de emergencia y preparación operativa
Cuando no hay disponible ningún equipo de carga, las soluciones más fiables son:
● Prestarse cargadores compatibles
● Visitar tiendas especializadas en modelos a control remoto (RC)
● Utilizar estaciones de carga públicas o profesionales
Las estrategias de preparación a largo plazo incluyen mantener cargadores redundantes, llevar bancos de energía compatibles con Power Delivery (PD) y montar kits modulares de carga para campo.
8. Conclusión
Cargar la batería de un dron sin su cargador original es técnicamente factible bajo condiciones específicas. La viabilidad de los métodos alternativos depende de la presencia de electrónica de protección, de la disponibilidad de fuentes de alimentación reguladas y del conocimiento que tenga el usuario sobre el comportamiento de las baterías de litio. Al adoptar prácticas basadas en criterios de ingeniería y al cumplir estrictamente los protocolos de seguridad, los operadores de UAV pueden mantener la continuidad operativa incluso en entornos con recursos limitados.
