
Abstrait
La continuité opérationnelle des véhicules aériens sans pilote (UAV) est fondamentalement limitée par la disponibilité et l’entretien adéquat de leurs systèmes embarqués de stockage d’énergie électrochimique. Bien que les chargeurs fournis par le fabricant soient conçus pour garantir le respect des exigences strictes liées aux chimies de batteries au lithium, les déploiements réels d’UAV se produisent fréquemment dans des environnements où ce type d’équipement n’est pas disponible. Cet article développe un cadre analytique de niveau système permettant de comprendre comment les batteries de drones peuvent être rechargées en l’absence de leurs chargeurs d’origine. En s’appuyant sur des principes issus de l’électrochimie, de l’électronique de puissance et des recherches sur la gestion énergétique des UAV, l’étude évalue les voies alternatives de recharge, détermine leur faisabilité technique et définit les limites de sécurité dans lesquelles ces méthodes peuvent être utilisées de façon responsable.
1. Introduction
La prolifération des technologies de drones (UAV) dans les domaines scientifique, industriel et commercial a accru la nécessité de stratégies fiables et adaptables de gestion de l'énergie. Les batteries au lithium-polymère (LiPo) et au lithium-ion (Li-ion), grâce à leur forte énergie massique et à leurs caractéristiques de décharge favorables, restent les sources d’alimentation dominantes pour les systèmes de propulsion des drones. Toutefois, ces technologies imposent des contraintes opérationnelles strictes, notamment lors de la charge, où toute déviation par rapport aux conditions prescrites de tension, de courant ou de température peut entraîner une dégradation irréversible ou une défaillance catastrophique.
Lors des opérations sur le terrain, les utilisateurs de drones (UAV) peuvent être confrontés à des scénarios dans lesquels l’appareil de charge d’origine est perdu, endommagé ou autrement inaccessible. Le défi central consiste donc à déterminer si des mécanismes de charge alternatifs sont capables de reproduire l’environnement électrochimique requis pour un réapprovisionnement énergétique sûr et efficace. Cet article aborde ce défi en examinant les fondements théoriques, les exigences techniques et les limites pratiques des approches de charge non standard.
2. Fondements électrochimiques et techniques de la charge des batteries d’UAV
2.1 Chimies de batteries à base de lithium
Les batteries LiPo et Li-ion fonctionnent grâce à des processus réversibles d’intercalation des ions lithium. Leur performance et leur durée de vie dépendent du maintien de :
● Une stabilité de tension dans des plages électrochimiques étroites
● Un flux de courant contrôlé afin d’éviter le dépôt de lithium
● Un équilibre thermique pour éviter une dégradation accélérée de la couche SEI
● L’équilibrage des cellules dans les configurations multi-cellules
Ces contraintes ne sont pas arbitraires ; elles découlent de la thermodynamique et de la cinétique intrinsèques du transport des ions lithium. Tout autre procédé de charge doit donc s’approcher des conditions dans lesquelles ces réactions se déroulent en toute sécurité.
2.2 Le paradigme de charge CC–CV
Le protocole de charge canonique pour les batteries au lithium est la méthode à courant constant–tension constante (CC–CV). Pendant la phase CC, la batterie est chargée à un courant fixe jusqu’à ce qu’elle atteigne sa tension maximale autorisée. La phase CV maintient ensuite cette tension tandis que le courant diminue progressivement. Cette approche en deux phases minimise les contraintes exercées sur les matériaux des électrodes et atténue le risque de dépôt de lithium.
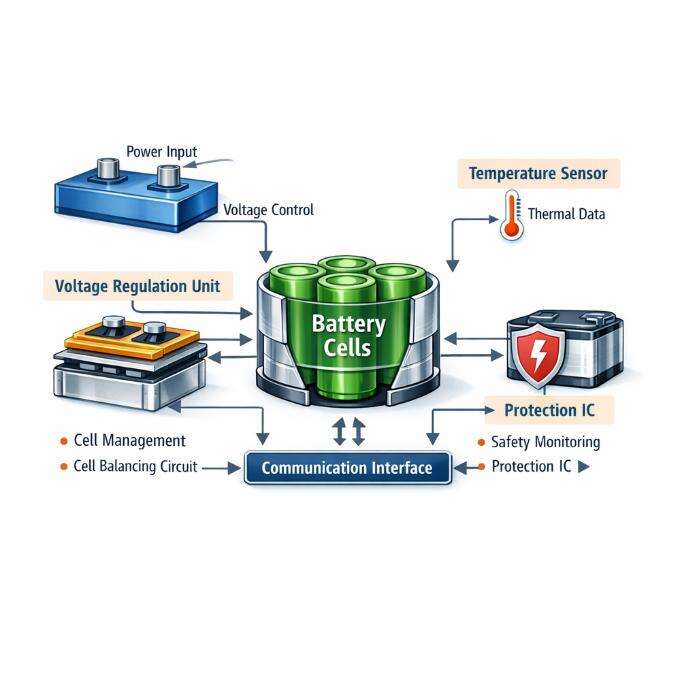
2.3 Systèmes de gestion de batterie (BMS)
De nombreux UAV grand public intègrent des batteries intelligentes équipées de modules BMS qui assurent les fonctions suivantes :
● Régulation en temps réel de la tension et du courant
● Surveillance thermique
● Équilibrage des cellules
● Détection des défauts
La présence d'un système de gestion de batterie (BMS) élargit considérablement la gamme d'alternatives de charge viables, car la batterie elle-même peut compenser les irrégularités de la source d'alimentation externe.
3. Mécanismes de charge alternatifs : une revue technique et analytique
3.1 Chargeurs universels équilibrés
3.1.1 Architecture fonctionnelle
Les chargeurs universels équilibrés sont des dispositifs de conditionnement d'énergie à base de microcontrôleur, capables d'exécuter une charge CC–CV tout en égalisant simultanément les tensions des cellules. Leurs algorithmes internes ajustent dynamiquement le courant et la tension afin de maintenir la stabilité électrochimique.
3.1.2 Avantages techniques
● Conformité élevée aux profils de charge spécifiés par le fabricant
● Mécanismes de sécurité intégrés
● Compatibilité avec diverses configurations de batteries
Du point de vue de l'ingénierie, cette méthode reproduit le plus fidèlement le comportement des chargeurs d'origine (OEM) et constitue donc l'alternative techniquement la plus justifiable.
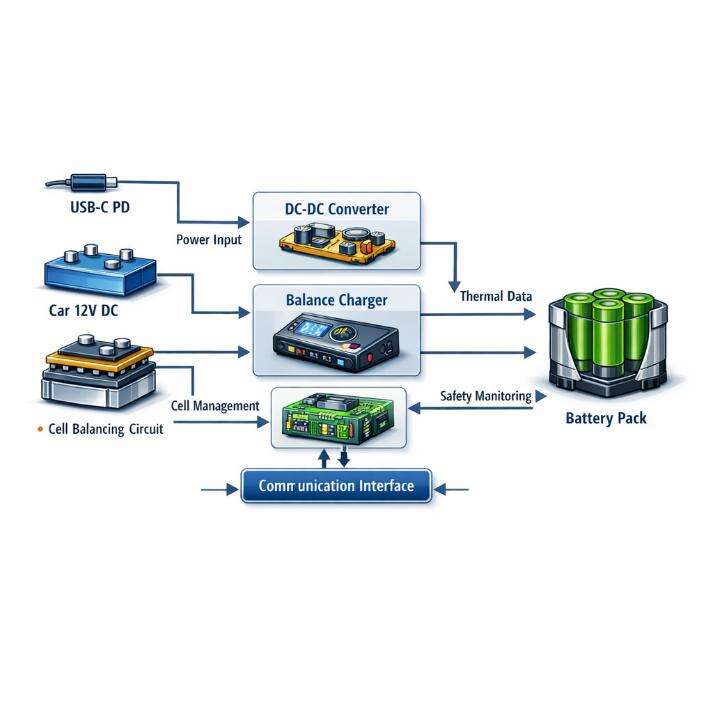
3.2 Alimentation par USB-C avec fonctionnalité Power Delivery pour batteries intelligentes
3.2.1 Mécanisme sous-jacent
La fonctionnalité Power Delivery (PD) USB-C ne prend pas en charge intrinsèquement la charge des batteries lithium. À la place, les batteries intelligentes intègrent des convertisseurs continu-continu (DC-DC) et des circuits de protection qui transforment l’alimentation USB en un environnement de charge régulée. La source d’alimentation externe fournit simplement de l’énergie ; les électroniques internes de la batterie régulent le processus de charge.
3.2.2 Contraintes d’application
Cette méthode n’est applicable que pour les batteries dotées d’un système de gestion intégré (BMS). Les blocs LiPo bruts ne disposent pas de la régulation nécessaire et ne peuvent donc pas être chargés en toute sécurité via des systèmes basés sur USB.
3.3 Systèmes de charge intégrés aux véhicules
3.3.1 Infrastructure électrique automobile
Les automobiles fournissent une alimentation continue stable de 12 V qui peut être convertie en courant alternatif (CA) ou en courant continu (CC) régulé à l’aide d’onduleurs. Cette infrastructure peut alimenter des chargeurs équilibrés ou des chargeurs automobiles spécifiques aux drones, ce qui fait des véhicules une plateforme mobile pratique pour la charge.
3.3.2 Considérations techniques
● Les fluctuations de tension doivent être atténuées
● La recharge avec le moteur éteint risque d’épuiser la batterie du véhicule
● La gestion thermique reste essentielle
3.4 Architectures de recharge pilotées par l’énergie solaire
3.4.1 Intégration photovoltaïque
Les panneaux solaires produisent un courant continu (CC) variable, dépendant de l’irradiance. Lorsqu’ils sont couplés à une station d’alimentation régulée ou à un convertisseur, ils peuvent assurer la recharge des batteries des UAV dans des environnements éloignés.
3.4.2 Limitations
● Faible rendement de charge
● Dépendance aux conditions environnementales
● Nécessité d’un équipement intermédiaire de régulation
La recharge basée sur l’énergie solaire doit donc être considérée principalement comme un mécanisme complémentaire ou d’usage d’urgence, et non comme une stratégie de recharge principale.
3.5 Alimentations électriques de qualité laboratoire (utilisation réservée aux experts)
3.5.1 Faisabilité technique
Les alimentations électriques à courant continu programmables peuvent simuler la charge CC–CV si elles sont configurées avec précision. Toutefois, elles ne disposent pas de fonction d’équilibrage des cellules, ce qui les rend inadaptées aux blocs de plusieurs cellules, sauf lorsqu’elles sont associées à un matériel externe d’équilibrage.
3.5.2 Évaluation des risques
En raison de la forte probabilité de mauvaise configuration, cette méthode convient uniquement aux utilisateurs disposant d’une formation formelle en électronique de puissance ou en génie électrochimique.
4. Méthodes de charge devant être catégoriquement exclues
Plusieurs techniques de charge improvisées apparaissent fréquemment dans les discussions en ligne, mais elles manquent de fondement scientifique. Il s’agit notamment de :
● Branchement direct sur des chargeurs de téléphone ou d’ordinateur portable
● Charge via des sources de courant continu non régulées
● Branchement direct de blocs LiPo sur des batteries automobiles
Ces méthodes violent des contraintes électrochimiques fondamentales et présentent des risques graves pour la sécurité, notamment la défaillance thermique et la rupture de la cellule.
5. Efficacité de la charge et dynamique temporelle
La durée de charge dépend de :
● Capacité de la batterie
● Disponibilité de la puissance d’entrée
● Efficacité du circuit de charge
Les chargeurs équilibrés atteignent généralement le rendement le plus élevé, tandis que les systèmes basés sur l’énergie solaire affichent le rendement le plus faible. La technologie USB-C PD occupe une position intermédiaire, limitée principalement par son seuil maximal de puissance délivrée.
6. Cadre de sécurité pour la charge non standard
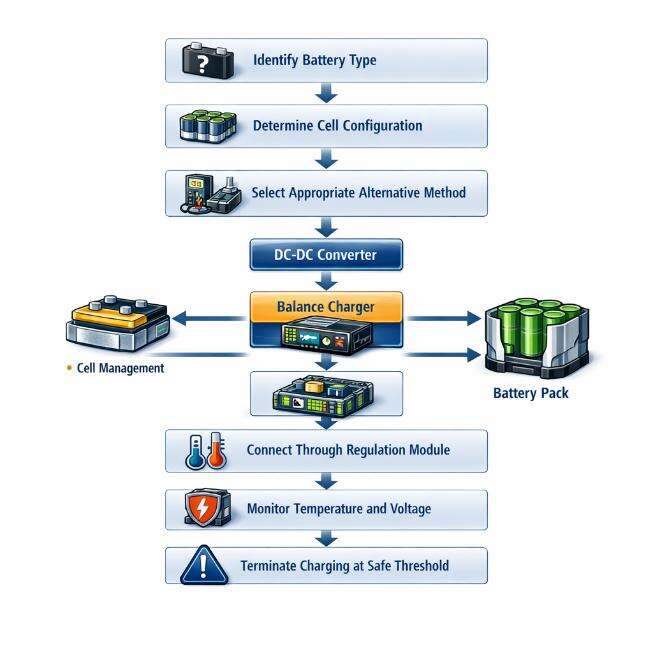
Un protocole de sécurité rigoureux doit inclure :
● Surveillance thermique continue
● Utilisation de systèmes de confinement résistants au feu
● Éviter la charge non surveillée
● Vérification des paramètres de tension et de courant
Ces mesures atténuent les risques inhérents liés au stockage d'énergie à base de lithium.
7. Mesures d'urgence et préparation opérationnelle
Lorsqu’aucun équipement de charge n’est disponible, les solutions les plus fiables consistent à :
● Emprunter des chargeurs compatibles
● Se rendre dans des magasins spécialisés en modélisme RC
● Utiliser des bornes de recharge publiques ou professionnelles
Les stratégies de préparation à long terme comprennent le maintien de chargeurs redondants, le transport de banques d’alimentation compatibles avec la norme PD et l’assemblage de kits de charge sur site modulaires.
8. Conclusion
Recharger la batterie d’un drone sans son chargeur d’origine est techniquement possible dans des conditions spécifiques. La viabilité des méthodes alternatives dépend de la présence d’électronique de protection, de la disponibilité de sources d’alimentation régulées et de la compréhension par l’utilisateur du comportement des batteries au lithium. En adoptant des pratiques fondées sur l’ingénierie et en respectant les protocoles de sécurité, les opérateurs d’UAV peuvent assurer la continuité de leurs opérations, même dans des environnements aux ressources limitées.
