
Lühikokkuvõte
Pilootimata lennukite (UAV) töökindlus on põhimõtteliselt piiratud nende pardal olevate elektrokeemiliste energiamahtude saadavuse ja nende õige hooldusega. Kuigi tootja poolt tarnitud laadurid on projekteeritud vastama liitiumpõhiste akukeemiate rangele nõuetele, toimuvad reaalsetes UAV-de kasutusolukordades sageli keskkonnas, kus sellist varustust pole saadaval. Selles artiklis arendatakse süsteemitasandil analüütilist raamistikku, et mõista, kuidas drone’i akusid saab laadida originaallaadurite puudumisel. Toetudes elektrokeemia, võimsuselektroniika ja UAV-de energiavalitsemise uuringute põhimõtetele hindab uuring alternatiivseid laadimisviise, tuvastab nende tehnilise teostatavuse ning määrab kindlaks ohutuspiirid, milles neid meetodeid saab vastutustundlikult kasutada.
1. Sissejuhatus
UAV-tehnoloogiate levik teaduslikus, tööstuslikus ja kaubanduslikus valdkonnas on suurendanud vajadust usaldusväärsete ja kohandatavate energiavalitsemisstrateegiate järele. Liitium-polimeer (LiPo) ja liitium-ioon (Li-ion) akud – nende kõrge erienergia ja soodsate lahtilaadimisomaduste tõttu – jäävad UAV-propulssioonisüsteemide peamisteks toiteallikateks. Siiski seab see keemia rangeid toimimispiiranguid, eriti laadimisel, kus ettenähtud pinge, voolu või soojusrežiimi kõrvalekaldumine võib põhjustada pöördumatut degradatsiooni või katastrooflikku ebaõnnestumist.
Välitöödes võivad lennuaparaadi (UAV) kasutajad kokku puutuda olukordadega, kus originaallaadimisseade on kaotatud, kahjustatud või muul viisil ligipääsmatu. Seega on peamiseks väljakutseks kindlaks teha, kas alternatiivsed laadimismeetodid suudavad taastada elektrokeemilise keskkonna, mis on vajalik turvaliseks ja tõhusaks energiavarude täiendamiseks. Käesolev artikkel lahendab seda väljakutset, uurides mittestandardsete laadimismeetodite teoreetilisi aluseid, inseneritehnoloogilisi nõudeid ja praktilisi piiranguid.
2. Lennuaparaadi (UAV) aku laadimise elektrokeemilised ja inseneritehnoloogilised alused
2.1 Liitiumipõhised akukeemiad
LiPo- ja Li-ion-akud töötavad pööratavate liitiumioonide interkalaatsiooniprotsesside abil. Nende toimetus ja eluiga sõltuvad järgmise säilitamisest:
● Pinge stabiilsusest kitsastes elektrokeemilistes aknades
● Kontrollitud voolu voolust, et vältida liitiumi plaatumist
● Soojuslikust tasakaalust, et vältida kiirendatud SEI-kihiga seotud degradatsiooni
● Rakukontrollist mitmerakulistes konfiguratsioonides
Need piirangud ei ole suvalised; nad tulenevad liitiumioonide transpordi sisemisest termodynamikast ja kinetikast. Seega peab iga alternatiivne laadimismeetod järgima tingimusi, mille korral toimuvad need reaktsioonid ohutult.
2.2 CC–CV laadimisparadigma
Liitiumpõhiste akude standardlaadimisprotokoll on pidev-voolu–pidev-pinge (CC–CV) meetod. CC-faasis laaditakse akku kindla voolutugevusega, kuni see saavutab oma maksimaalse lubatava pinge. CV-faasis säilitatakse see pinge, samal ajal kui vool järk-järgult väheneb. See kahefaasiline lähenemine vähendab elektroodmaterjalidele avalduvat koormust ja vähendab liitiumi plaatumise riski.
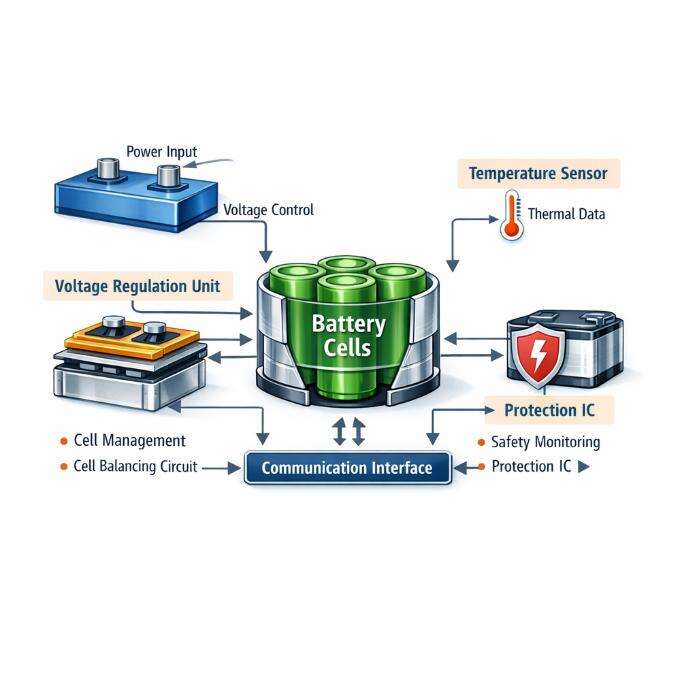
2.3 Akude juhtsüsteemid (BMS)
Paljud tarbijatele mõeldud lennukid (UAV-id) on varustatud nutikate akudega, millel on BMS-moodulid, mis teostavad järgmisi funktsioone:
● Reaalajas pinge- ja voolureguleerimine
● Soojusmonitoring
● Rakkude tasakaalustamine
● Vigade tuvastamine
BMS olemasolu laiendab oluliselt sobivate laadimisvõimaluste valikut, kuna aku ise suudab kompenseerida välist võimsusallikat iseloomustavaid ebaregulaarsusi.
3. Alternatiivsed laadimismeetodid: tehniline ja analüütiline ülevaade
3.1 Universaalsed tasakaalustavad laadurid
3.1.1 Funktsionaalne arhitektuur
Universaalsed tasakaalustavad laadurid on mikrokontrolleripõhised võimsuse reguleerimise seadmed, mis suudavad rakendada CC–CV-laadimist ning samal ajal tasakaalustada akurakkude pingeid. Nende sisemised algoritmid kohandavad dünaamiliselt voolu ja pinget elektrokeemilise stabiilsuse säilitamiseks.
3.1.2 Tehnilised eelised
● Kõrge täpsus tootja määratletud laadimisprofili järgimisel
● Sisseehitatud ohutusmehhanismid
● Ühilduvus erinevate aku konfiguratsioonidega
Ingenöörlikust vaatenurgast kujutab see meetod OEM-laadureid kõige täpsemalt ja on seega ka tehniliselt kõige põhjendatum alternatiiv.
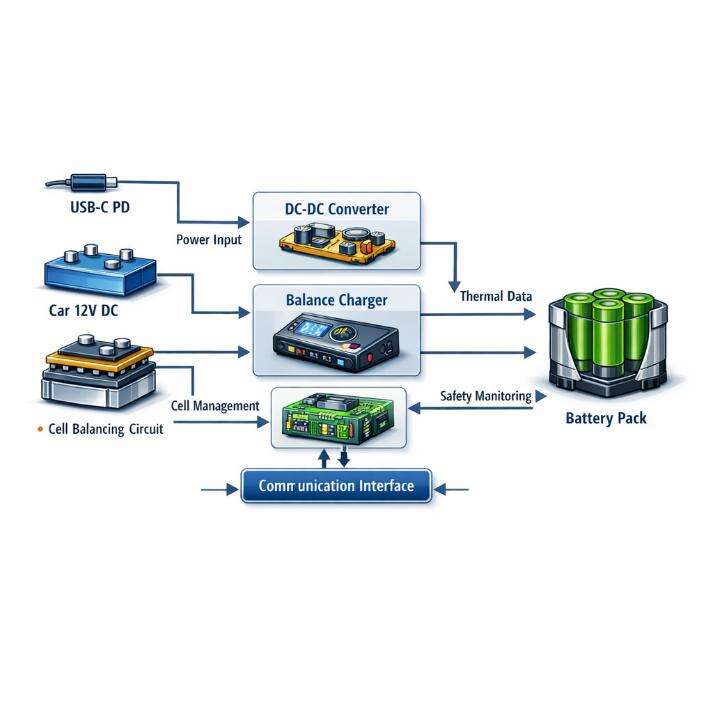
3.2 USB-C võimsusülekanne nuttide akude jaoks
3.2.1 Aluseks olev mehhanism
USB-C PD ei toeta omaniselt liitiumakude laadimist. Selle asemel sisaldavad nuttakud alalisvoolu-alalisvoolu (DC-DC) teisendajaid ja kaitseelektronikat, mis muudavad USB-sisendi reguleeritud laadimiskeskkonnaks. Välise toiteallika ülesanne on lihtsalt energiavaru tarnimine; laadimisprotsessi juhib akusisesed elektroonikakomponendid.
3.2.2 Rakendatavuse piirangud
Seda meetodit saab kasutada ainult sisseehitatud BMS-ga akude puhul. Töötlemata LiPo-pakkidel puudub vajalik reguleerimine ning seetõttu ei ole nende ohutu laadimine USB-põhiste süsteemide abil võimalik.
3.3 Sõidukitesse integreeritud laadimissüsteemid
3.3.1 Autode elektriline infrastruktuur
Autod pakuvad stabiilset 12 V alalisvoolu toiteallikat, mida saab kasutada võimsusinverteerijatega alalisvoolu muutmiseks vahelduvvooluks või reguleeritud alalisvooluks. See infrastruktuur võimaldab tasakaalustavaid laadimise seadmeid või lennukite jaoks mõeldud autolaadimisseadmeid, muutes sõidukid praktiliseks mobiilsel laadimisplatvormiks.
3.3.2 Inseneritehnoloogilised kaalutlused
● Pinge kõikumisi tuleb leevendada
● Mootori väljalülitamisel laadimine kaasab ohtu, et sõiduki aku tühjeneb
● Soojusjuhtimine jääb oluliseks
3.4 Päikeseenergiaga toodetud laadimisarhitektuurid
3.4.1 Fotovoltaikaintegratsioon
Päikesepaneelid toodavad muutlikku alalisvoolu väljundit, mille suurus sõltub kiirgusest. Kui neid kasutatakse reguleeritud võimsusjaama või konverteriga koos, saab nendega toetada lennukite (UAV) aku laadimist kaugsetes keskkondades.
3.4.2 Piirangud
● Madal laadimise efektiivsus
● Sõltuvus keskkonnatingimustest
● Vahesüsteemi reguleerimise seadmete vajadus
Seega tuleks päikseenergiaga toodetud laadimist käsitleda pigem täiendava või hädaolukorras kasutatava mehhanismena kui esmase laadimisstrateegiana.
3.5 Laboratooriatasemel toiteplokid (ainult ekspertidele)
3.5.1 Tehniline teostatavus
Programmeeritavad alalispinge toiteplokid suudavad imiteerida CC–CV laadimist, kui need on täpselt seadistatud. Siiski neil puudub rakupõhine tasakaalustamisvõime, mistõttu ei sobi nad mitmerakuliste pakkide jaoks ilma väliste tasakaalustusseadmeteta.
3.5.2 Riskihindamine
Kuna vale seadistuse tõenäosus on kõrge, on see meetod sobiv ainult isikutele, kes on saanud ametlikku koolituset võimsuselektroniikas või elektrokeemilises inseneriteaduses.
4. Laadimismeetodid, mida tuleb kategooriliselt välistada
Mitmed improviseeritud laadimismeetodid ilmuvad sageli veebikettaidetes, kuid neil puudub teaduslik põhjendatus. Need hõlmavad:
● Otsene ühendus mobiiltelefoni või sülearvuti laaduritega
● Laadimine reguleerimata alalisvoolu allikast
● LiPo-pakkide otsene ühendamine autode akudega
Sellised meetodid rikuvad põhielektrokeemilisi piiranguid ja kujutavad endast tõsiseid ohusid, sealhulgas soojuslikku lähtumist ja akukorpuse purunemist.
5. Laadimise efektiivsus ja ajaline dünaamika
Laadimise kestust mõjutavad:
● Akukapatsiteet
● Sisendvõimsuse saadavus
● Laadimisahela efektiivsus
Tasakaalustavad laadimisseadmed saavutavad tavaliselt kõrgeima efektiivsuse, samas kui päikesepõhised süsteemid on kõige madalamad. USB-C PD hõlmab vaheasendit, mille peamiseks piiranguks on selle võimsusülekande piir.
6. Mittestandardse laadimise ohutussüsteem
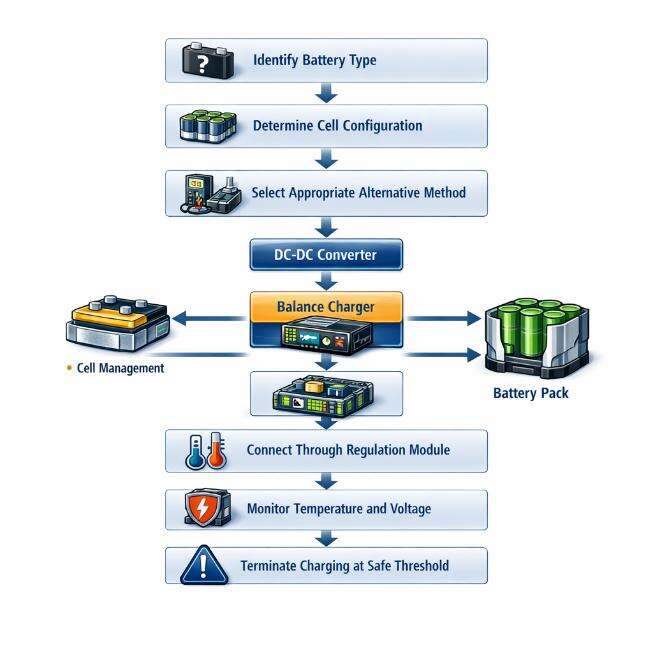
Rigoraalsed ohutusprotokollid peaksid sisaldama:
● Pidevat soojusmonitoringut
● Tulekindlate mahutussüsteemide kasutamine
● Laadimise jätmise vältimine ilma järelevalveta
● Pinge ja voolu parameetrite kontrollimine
Need meetmed vähendavad litiumipõhiste energiamahtudega seotud olemasolevaid riske.
7. Ärkhoiumeetmed ja toimimisvalmidus
Kui laadimisseadmeid pole saadaval, on kõige usaldusväärsemad lahendused:
● Ühilduvate laadurite laenamine
● RC-hobi poed külastamine
● Avalikute või professionaalsete laadimisjaamade kasutamine
Pikaajalised valmisolekustrateegiad hõlmavad ülearu laadurite säilitamist, PD-võimalustega laadimispangade kaasaspidamist ning modulaarsete välilaadimiskomplektide koostamist.
8. Järeldus
Drone aku laadimine ilma selle originaallaadurita on tehniliselt võimalik teatud tingimustel. Alternatiivsete meetodite kasutatavus sõltub kaitseelektroonika olemasolust, reguleeritud toiteallikate saadavusest ja kasutaja arusaamast liitiumaku käitumisest. Inseneriteadustes põhinevate praktikate rakendamisel ja ohutusprotokollide järgimisel saavad UAV-ioperaatorid tagada töökindluse ka ressursinappuses keskkonnas.
