
Abstrait
Le stockage de l'énergie reste le principal goulot d'étranglement dans la plage de performances des systèmes aériens sans pilote (UAS). Bien que des progrès significatifs aient été réalisés en matière d'optimisation aérostructurale, de navigation autonome et de matériaux composites légers, les limitations électrochimiques des technologies actuelles de batteries continuent de restreindre l'autonomie de vol et la continuité opérationnelle. Cet article propose une analyse universitaire des performances des batteries de drones, en mettant l'accent sur la durée de vol, la dynamique de charge, les mécanismes de dégradation et les dépendances environnementales. En intégrant des concepts provenant de l'électrochimie, du génie aérospatial et de l'optimisation des systèmes, cette discussion vise à établir un fondement théorique permettant de comprendre les contraintes pesant sur les systèmes énergétiques des UAS ainsi que leurs évolutions futures.
1. Introduction
L'expansion rapide des applications des systèmes aériens sans pilote (UAS), allant de l'agriculture de précision et de la topographie géospatiale à l'intervention d'urgence et à la surveillance environnementale, a accru la demande de systèmes énergétiques embarqués fiables. Contrairement aux aéronefs habités, qui peuvent tirer parti de carburants à haute densité énergétique, les drones électriques sont fondamentalement limités par les caractéristiques d'énergie spécifique et de puissance de leurs batteries. Par conséquent, l'autonomie d'un drone ne dépend pas uniquement de la conception de la cellule ou de l'efficacité de la propulsion, mais est intrinsèquement liée au comportement électrochimique de son système de stockage d'énergie.
L'intérêt académique pour les performances des batteries des UAS s'est considérablement accru, porté par la nécessité de quantifier les modèles de consommation énergétique, de prédire la dégradation et de développer des solutions hybrides ou de nouvelle génération pour le stockage d'énergie. Cet article synthétise les connaissances actuelles afin d'offrir un examen rigoureux des durées de vol et de recharge dans le contexte plus large de la conception des systèmes énergétiques des UAS.
2. Chimies des batteries dans les systèmes aériens sans pilote (UAS) : fondements électrochimiques
2.1 Systèmes lithium-polymère (LiPo)
Les batteries LiPo dominent les UAS à multirotors en raison de leur puissance massique élevée et de leur capacité à supporter des taux de décharge élevés. Leur architecture à électrolyte polymère réduit la masse et permet des formes flexibles, ce qui est avantageux pour les cellules aérodynamiques compactes.
Du point de vue électrochimique, les cellules LiPo présentent :
● Une tolérance élevée aux taux C , permettant une extraction rapide de courant sans chute de tension sévère
● Une impédance interne faible , améliorant la réponse transitoire lors des ajustements de poussée
●Une densité de puissance gravimétrique élevée , essentielle pour les plateformes à multirotors exigeantes en matière de portance
Toutefois, les systèmes LiPo sont sensibles à la décomposition de l’électrolyte, à la formation de dendrites et à l’instabilité thermique. Ces mécanismes de dégradation réduisent la durée de vie en cycles et imposent des exigences strictes en matière de protocoles de charge et de stockage.
2.2 Systèmes lithium-ion (Li-ion)
Les batteries lithium-ion, notamment celles utilisant des chimies NMC ou NCA, offrent une énergie massique plus élevée et une meilleure stabilité cyclique. Leur stabilité électrochimique les rend adaptées aux systèmes aériens sans pilote à voilure fixe et aux missions à longue endurance, où la puissance soutenue, plutôt que la puissance crête, constitue la principale exigence.
Les principaux avantages sont les suivants:
● Densité énergétique supérieure , permettant des durées de mission prolongées
●Autodécharge plus faible , avantageux pour un déploiement intermittent
●Résistance structurelle améliorée , réduisant le risque de défaillance mécanique
Leur capacité de décharge crête plus faible limite toutefois leur applicabilité dans des régimes de vol exigeant une forte poussée ou fortement dynamique.
3. Durée de vol : un modèle multivarié de consommation énergétique
L'autonomie de vol des systèmes aériens sans pilote (UAS) dépend d'une interaction complexe entre des variables aérodynamiques, mécaniques et électrochimiques. Les modèles académiques expriment généralement l'autonomie en fonction des besoins en poussée, de la capacité de la batterie et de l'efficacité du système.
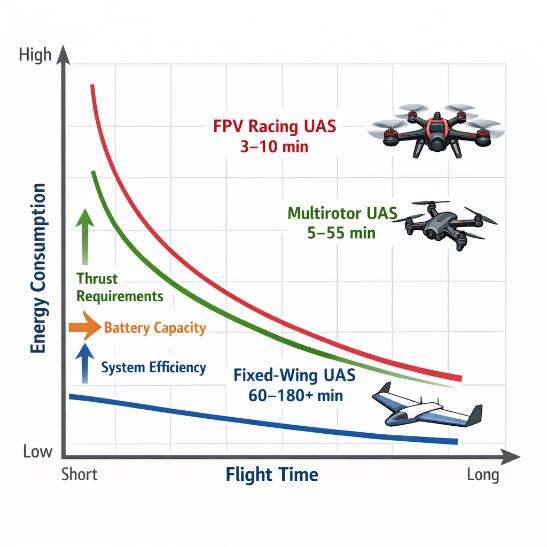
3.1 Plateformes multirotors
Les UAS multirotors nécessitent une poussée continue pour maintenir leur portance, ce qui entraîne une forte consommation d'énergie. Les plages d'autonomie typiques comprennent :
● UAS micro : 5–15 minutes
● UAS grand public : 20 à 40 minutes
● UAS professionnels : 30 à 55 minutes
Le plafond d'autonomie est fondamentalement limité par la relation quadratique entre la poussée et la demande en puissance.
3.2 Plates-formes à voilure fixe
Les UAS à voilure fixe génèrent leur portance de manière aérodynamique, réduisant ainsi considérablement leur consommation d'énergie. L'autonomie varie couramment entre 60 et plus de 180 minutes, selon la charge alaire, l'efficacité de la propulsion et la capacité de la batterie.
3.3 Systèmes FPV haute performance
Les drones de course FPV présentent des taux de décharge extrêmement élevés, souvent supérieurs à 50–100 C, ce qui se traduit par des durées de vol de 3 à 10 minutes. Ces plateformes privilégient la puissance instantanée plutôt que l’autonomie, ce qui en fait des cas d’étude idéaux pour analyser le comportement des batteries sous contrainte élevée.
4. Déterminants de l’autonomie de vol : une analyse technique

4.1 Charge aérodynamique et mécanique
La masse de la charge utile augmente la poussée requise, tandis que la géométrie de la charge utile influence les coefficients de traînée. Ces deux facteurs élèvent directement la consommation d’énergie.
4.2 Dépendances environnementales
Les conditions environnementales exercent des effets mesurables sur les performances de la batterie :
● Basses Températures réduisent la mobilité ionique et augmentent la résistance interne
● Hautes altitudes réduisent l’efficacité des hélices en raison de la faible densité de l’air
● Perturbations dues au vent nécessitent une poussée compensatoire, augmentant la dépense énergétique
Ces variables doivent être intégrées dans les modèles prédictifs d’endurance.
4.3 Vieillissement électrochimique
Le vieillissement des batteries se manifeste par :
● Perte de capacité (perte de lithium actif)
● Augmentation de la résistance interne (épaississement de la couche SEI)
● Instabilité de la tension sous charge
Ces facteurs réduisent l’énergie utilisable et accélèrent le stress thermique lors de manœuvres à forte puissance.
5. Durée de charge : contraintes électrochimiques et thermiques
5.1 Régimes de charge standard
La durée de charge est régie par le protocole à courant constant/tension constante (CC/VC). Les durées de charge typiques sont les suivantes :
● UAS micro : 30 à 90 minutes
●UAS grand public : 60 à 120 minutes
● UAS professionnels : 90–180 minutes
5.2 Limitations de la charge rapide
La charge rapide augmente le risque de dépôt de lithium, accroît la charge thermique et accélère la dégradation. Des études académiques montrent systématiquement que la charge à haut débit réduit la durée de vie en cycles en raison de l’instabilité de la couche SEI et des contraintes exercées sur les électrodes.
5.3 Charge parallèle dans les applications hautes performances
La charge parallèle est largement utilisée dans les communautés FPV, mais elle introduit des risques liés au déséquilibre de tension et à la ruée thermique. Un équilibrage et une surveillance adéquats sont essentiels pour assurer la sécurité.
6. Stratégies d’amélioration de l’autonomie : une approche d’ingénierie des systèmes

6.1 Conditionnement thermique
Le maintien des batteries dans la plage de température optimale (20–30 °C) améliore la conductivité ionique et réduit l’affaissement de tension.
6.2 Optimisation structurelle et de la propulsion
● Hélices à haut rendement
● Moteurs à faible constante de vitesse (KV) pour les plateformes d’endurance
● Structures aérodynamiquement optimisées
Ces choix de conception réduisent la consommation d’énergie par unité de poussée.
6.3 Bonnes pratiques de gestion des batteries
● Éviter les décharges profondes (< 15 %)
● Stockage à un état de charge compris entre 40 % et 60 %
● Réduire au minimum l’exposition aux hautes températures
Ces pratiques atténuent la dégradation et préservent les performances à long terme.
7. Considérations de sécurité relatives aux systèmes de batteries pour les systèmes aériens sans pilote (UAS)
Les batteries au lithium présentent des risques inhérents en raison de leur forte densité énergétique et de leurs électrolytes inflammables. Les considérations de sécurité comprennent :
● Stockage à une tension appropriée afin de minimiser la contrainte chimique
● Inspection régulière pour éviter le gonflement ou la déformation mécanique
● Utilisation d’un contenant résistant au feu pendant la charge et le stockage
Ces mesures sont essentielles pour prévenir les événements de réaction thermique incontrôlée.
8. Perspectives futures de la recherche sur l’énergie pour les systèmes aériens sans pilote (UAS)
8.1 Batteries à état solide
Les électrolytes à état solide promettent :
● Une densité énergétique plus élevée
● Une stabilité thermique améliorée
● Une réduction du risque de formation de dendrites
8.2 Piles à combustible à hydrogène
Les systèmes aériens sans pilote (UAS) équipés de piles à combustible offrent une autonomie de plusieurs heures, constituant une alternative prometteuse pour les missions à longue portée.
8.3 Systèmes hybrides solaires
Les UAS à voilure fixe intégrant des panneaux solaires peuvent fonctionner quasi continuellement dans des conditions favorables.
8.4 Graphène et nanomatériaux avancés
Les électrodes renforcées au graphène pourraient permettre une charge ultra-rapide et de meilleures performances thermiques, bien que leur commercialisation reste limitée.
9. Conclusion
Les performances des batteries restent la contrainte déterminante en matière d'autonomie et d'efficacité opérationnelle des systèmes aériens sans pilote (UAS). À travers une analyse scientifique du comportement électrochimique, des dépendances environnementales et des stratégies d'optimisation au niveau système, cet article met en lumière la nature multifacette des limitations énergétiques des UAS. Des recherches continues sur les matériaux avancés, les architectures énergétiques hybrides et les algorithmes intelligents de gestion de l'énergie seront essentielles pour surmonter les barrières actuelles en matière d'autonomie et permettre le développement de la prochaine génération de plateformes UAS hautes performances.
