
Abstrakt
Energioplagringsmoduler baseret på litiumkemi er grundlæggende for driften af moderne ubemandede luftfartøjer (UAV'er). Selvom disse batterier rutinemæssigt oplades i felten og laboratoriemiljøer, styres selve opladningsprocessen af en række elektrokemiske, termiske og driftsmæssige begrænsninger, som ofte undervurderes. Afvigelser fra passende opladningsforhold accelererer strukturel nedbrydning, reducerer tilgængelig kapacitet og øger risikoen for katastrofal fejl. Denne undersøgelse genovervejer opladning af UAV-batterier fra et systemteknisk perspektiv med fokus på interaktionen mellem cellekemi, opladningsalgoritmer, miljømæssige grænser og krav på missionsniveau. Analysen samler ingeniørprincipper i en forenet ramme, der er velegnet til UAV-forskere og operatører.
Indekstermer— UAV-energisystemer, batterier baseret på litium, opladningsregulering, termiske begrænsninger, driftssikkerhed.
I. Introduktion
Genopladelige litiumbatterier er blevet den dominerende strømkilde til små luftbårne robotplatforme på grund af deres gunstige masse-specifikke energi og evne til at klare høje transiente belastninger. Trods deres udbredelse forbliver opladningen af disse batterier en ikke-triviel ingeniøropgave. Opladningsprocessen er begrænset af kinetikken i litiuminterkalering, stabiliteten af den faste elektrolyt-grænseflade (SEI) og cellestakens termiske adfærd. Disse begrænsninger pålægger strenge grænser for spænding, strøm og temperatur under opladning. Når UAV’er udvikler sig fra rekreative enheder til missionskritiske aktiver, bliver behovet for strengt definerede opladningsprocedurer stadig mere vigtigt. Denne artikel analyserer opladningsprocessen ud fra et flerlaget ingeniørperspektiv, hvor elektrokemiske grundprincipper integreres med UAV’s driftskrav.
II. Batteriarkitekturer i UAV-platforme
A. Polymer-elektrolyt-poseceller
Polymer-elektrolyt-pungceller, almindeligt kaldet LiPo-batterier, anvender laminerede elektrodestak og en gelagtig elektrolyt. Deres mekaniske fleksibilitet muliggør høj energitæthed, men øger også følsomheden over for deformationsbetingede fejl. Spændingsområdet er strengt begrænset af elektrolytens stabilitet, og overskridelse af den øvre grænse udløser irreversible sidereaktioner.
B. Cylindriske og prismeformede litium-ionceller
Litium-ionceller med stive omslag udviser forbedret strukturel robusthed og længere cyklusliv. Deres elektrokemiske adfærd styres af interkalationsdynamikken inden for laggede eller spinel-katodestrukturer. Selvom deres afladningskapacitet er lavere end den for LiPo-celller, gør deres termiske stabilitet og forudsigelige aldringskarakteristika dem velegnede til UAV’er, hvor holdbarhed er afgørende.
C. Batteripakker med integreret styringselektronik
Avancerede UAV-platforme integrerer batteristyringssystemer (BMS), der overvåger celle-spændinger, temperaturer og balanceringsoperationer. Disse indlejrede systemer håndhæver driftsgrænser og leverer diagnostisk information, men eliminerer ikke behovet for kontrollerede opladningsmiljøer.
III. Evaluering før opladning
A. Vurdering af strukturel integritet

Før opladning påbegyndes, skal batteriet vurderes for mekaniske anomalier. Deformation, gasakkumulation eller elektrolytrest er tegn på en kompromitteret intern struktur. Sådanne forhold ændrer den interne impedans og kan udløse termisk ustabilitet under opladning.
B. Verificering af termisk tilstand
Cellens temperatur påvirker kraftigt opladningsmodtageligheden. Opladning ved lav temperatur nedsætter litiumdiffusionen og fremmer aflejring af metallisk litium, mens høje temperaturer accelererer parasitiske reaktioner. En termisk afbalanceret tilstand er derfor påkrævet før opladning.
C. Konsistens i opladerkonfiguration
For pakker uden indbygget styringselektronik skal opladeren konfigureres, så den svarer til pakkens antal celler og kemisk sammensætning. Forkert konfiguration ændrer spændingsgrænsen eller strømprofilen, hvilket fører til accelereret forringelse eller øjeblikkelig fejl.
IV. Mekanismer til opladningsregulering
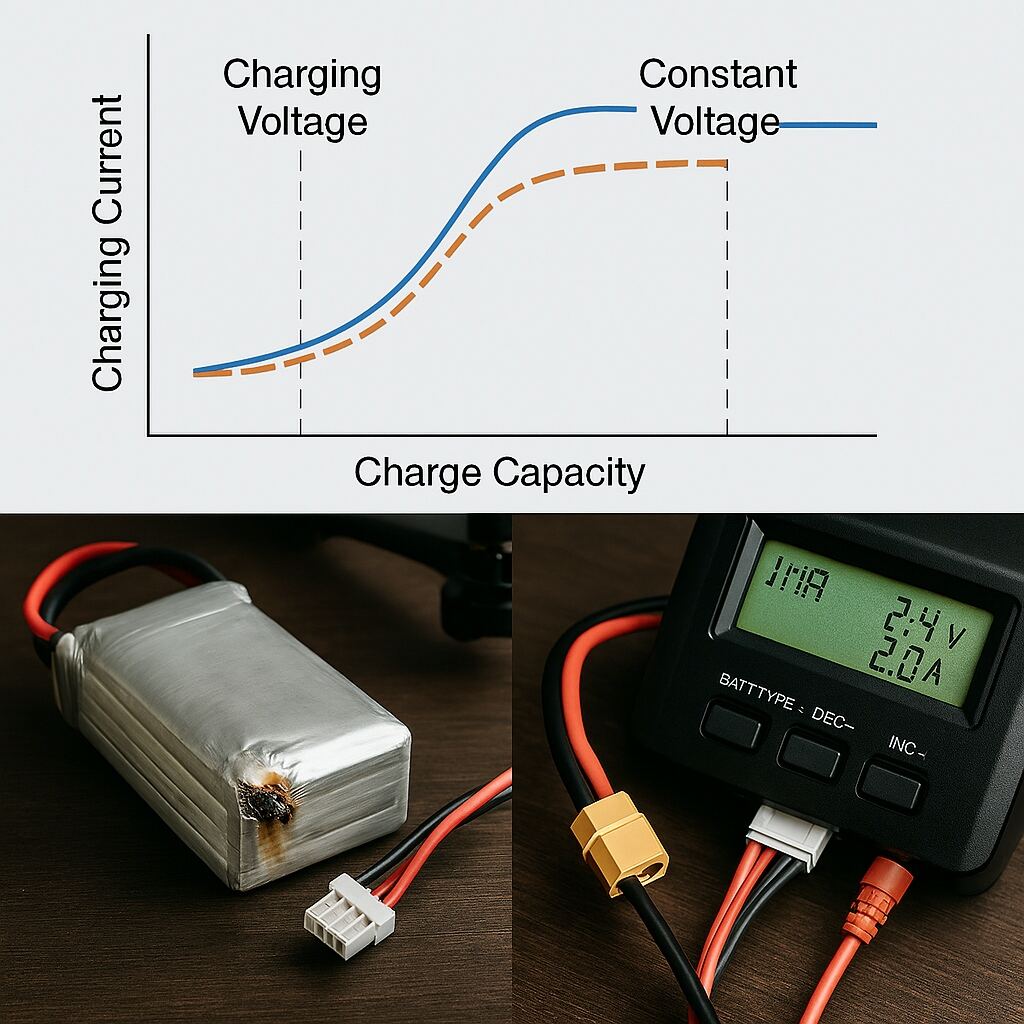
A. To-trins opladningsstyring
Lithiumbaserede batterier oplades typisk ved hjælp af en to-trins reguleringsskema. I den første fase opretholdes en konstant strøm, hvilket tillader, at celle-spændingen stiger i henhold til dens indre impedans. Når spændingen når den øvre grænse, skifter opladeren til en konstant-spændingsfase, hvor strømmen gradvist aftager. Denne fremgangsmåde minimerer belastningen på elektrode–elektrolyt-grænsefladen.
B. Mellemcelle-udligning
Flercellede batteripakker kræver balancering for at forhindre afvigelse i celle-spændingerne. Uden balancering bestemmer den svageste celle den brugbare kapacitet, og den stærkeste celle risikerer overbelastning under opladning. Balanceringskredsløb dissiperer eller omfordeler ladning for at opretholde ensartethed i hele pakken.
C. Valg af strøm og overvejelser ved nedbrydning
Opladningsstrømmen angives typisk som en brøkdel af pakkens nominelle kapacitet. Højere strømme forkorter opladningstiden, men øger den termiske belastning og accelererer dannelse af SEI-lag. Lavere strømme reducerer nedbrydning, men forlænger omdrejningstiden, hvilket skaber en afvejning mellem driftshastighed og batteriets levetid.
V. Opladningsprocedure og miljøkrav
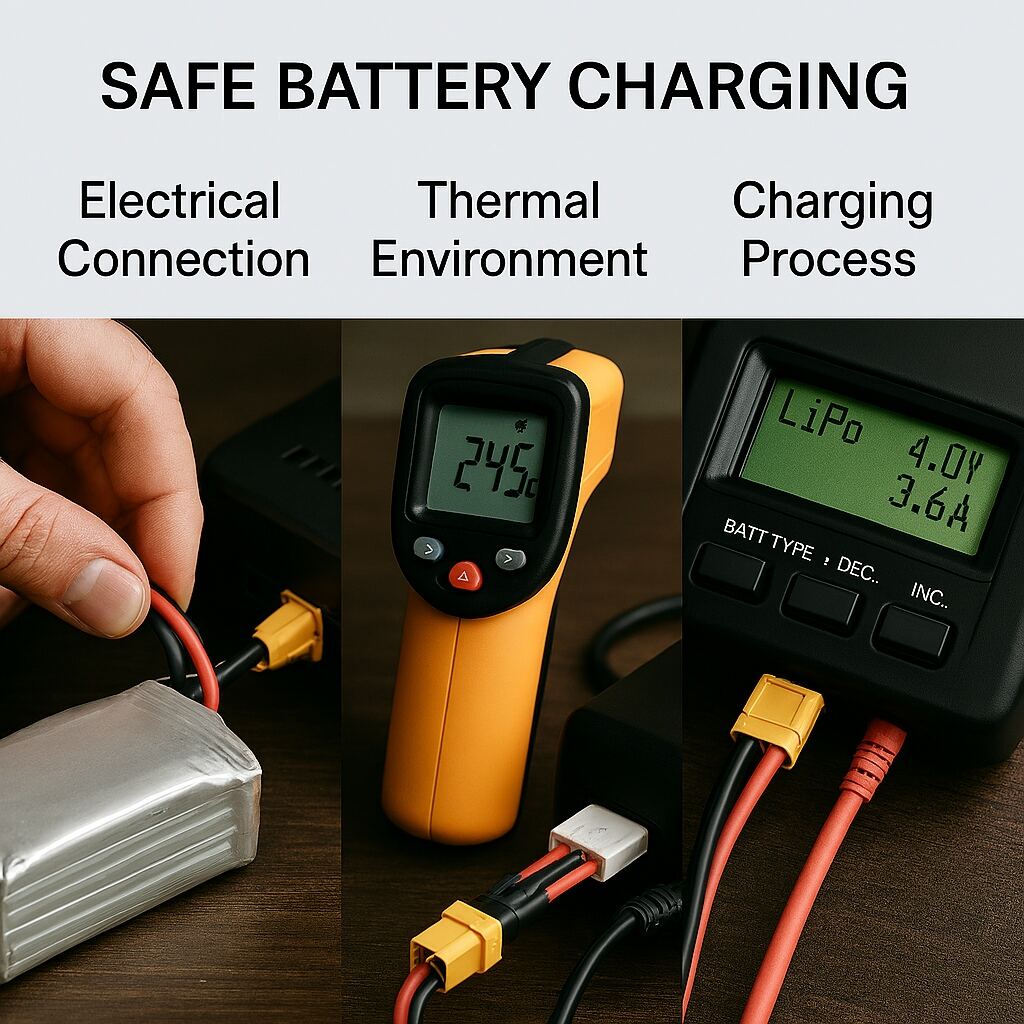
A. Elektrisk grænseflade og tilslutningsrækkefølge
Opladning kræver sikker tilslutning af både de primære strømforsyningsledninger og – for LiPo-pakker – balanceringsstikket. Forkert rækkefølge eller løse tilslutninger medfører resistiv opvarmning og spændingsustabilitet.
B. Fysisk opladningsmiljø
Opladningsmiljøet skal minimere termisk akkumulation og eliminere antændelseskilder. Ubrandbare overflader og tilstrækkelig luftcirkulation er afgørende. Batterier må ikke placeres i indskrænkede rum, hvor varme ikke kan afledes.
C. Overvågning af parametre i realtid
Under opladning skal temperatur, spændingsens enhedlighed og strømnedgang overvåges. Afvigelser fra den forventede adfærd indikerer interne anomalier såsom stigende impedans eller lokal opvarmning.
D. Stabilisering efter opladning
Efter opladning gennemgår batteriet en kort afslapningsperiode, hvor interne gradienter aftager. Denne stabilisering forbedrer spændingsnøjagtigheden og reducerer termisk spænding før brug eller opbevaring.
VI. Sikkerhedsbegrænsninger og fejlforløb
A. Mekanismer for termisk ustabilitet
Termisk løberi opstår, når eksotermiske reaktioner overstiger battericellens evne til at aflede varme. Over-spænding, interne kortslutninger og mekanisk beskadigelse kan udløse sådanne reaktioner. Forebyggende foranstaltninger omfatter kontrollerede opladningsmiljøer og kontinuerlig overvågning.
B. Miljøfølsomhed
Fugtighed, direkte solstråling og lukkede rum ændrer de termiske grænsebetingelser for batteriet. Opladning under sådanne forhold øger sandsynligheden for, at sikre driftsgrænser overskrides.
VII. Opladning af styrerede batterisystemer
A. Indbyggede tilsynsfunktioner
Intelligente batterier indeholder mikrokontrollere, der regulerer opladningsparametre, overvåger cellestatus og håndhæver sikkerhedsgrænser. Disse systemer reducerer operatørens byrde, men kræver stadig overholdelse af miljømæssige og termiske begrænsninger.
B. Driftsprocedure
Opladning finder typisk sted via en dedikeret grænseflade eller hub, der kommunikerer med den indbyggede controller. Systemet håndterer automatisk balancerings- og beskyttelsesfunktioner.
C. Driftsbegrænsninger
Selvom smarte batterier er avancerede, er de stadig følsomme over for ekstreme temperaturer og langvarig opbevaring ved høj ladestatus. Deres beskyttelsesfunktioner kan ikke kompensere for ukorrekt håndtering.
VIII. Driftsfejl og deres tekniske konsekvenser
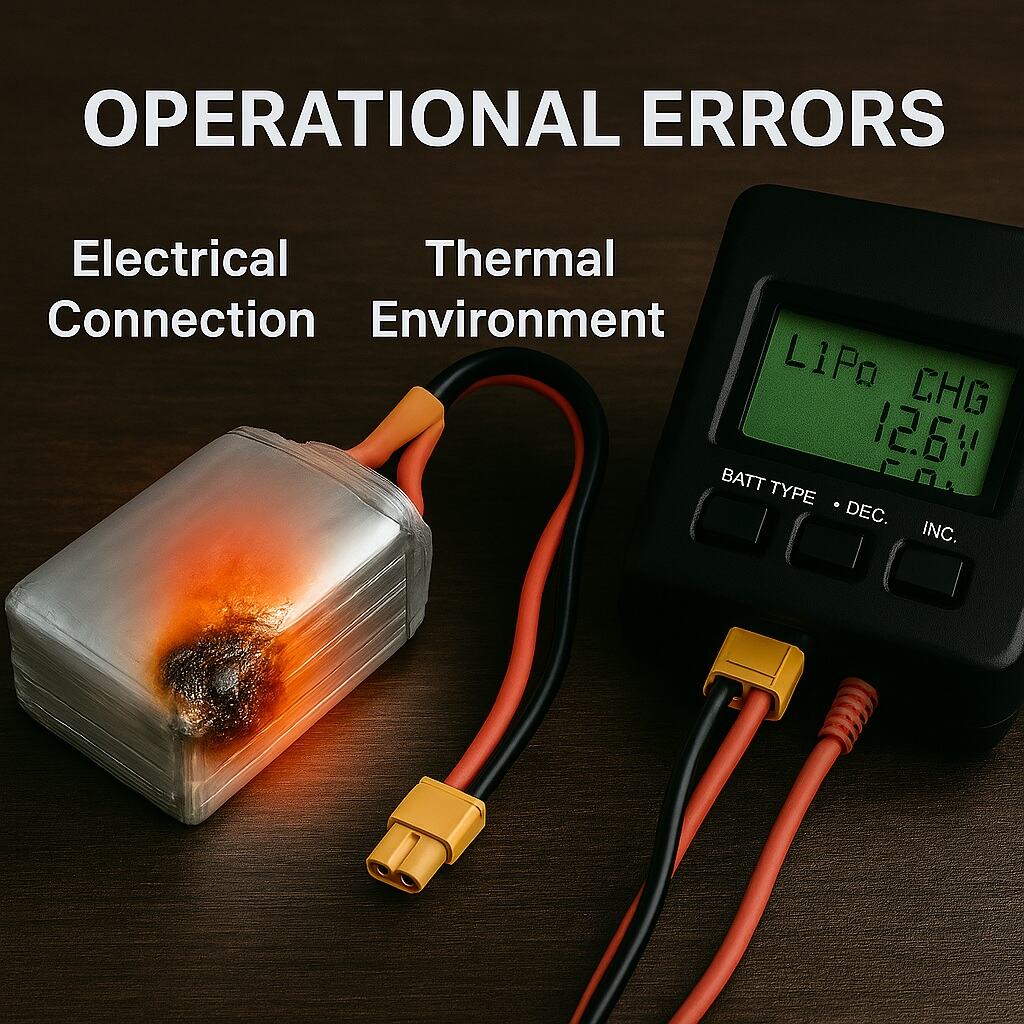
Almindelige driftsfejl omfatter at påbegynde opladning umiddelbart efter en udslip med høj belastning, brug af beskadigede stikforbindelser, anvendelse af for stor strøm og opladning i termisk ustabile miljøer. Disse praksisser accelererer impedansstigningen, reducerer cykluslivet og øger fejlrisikoen.
IX. Strategier til at forlænge batteriets levetid
A. Modererede opladningshastigheder
Lavere opladningsstrømme reducerer termisk stress og bremser nedgraderingsmekanismerne.
B. Kontrolleret opbevaringsstatus
At opretholde batteriet i en mellemtilstand af opladning under opbevaring minimerer kemisk aldring.
C. Rotation på flådeplan
Fordeling af brug på flere batteripakker forhindrer ujævn aldring og forbedrer den samlede flades pålidelighed.
D. Vedligeholdelse af elektrisk interface
Periodisk rengøring af forbindelsesstik reducerer resistive tab og forbedrer opladningseffektiviteten.
X. Opladning under ikke-standardiserede forhold
A. Drift ved lave temperaturer
Opladning ved lave temperaturer kræver forvarmning og reduceret strøm for at undgå lithiumbelægning.
B. Drift ved høje temperaturer
Opladning i varme miljøer kræver aktiv køling eller flytning til termisk stabile områder.
C. Feltladebegrænsninger
Bærbare strømkilder skal levere stabil spænding og bølgeformer med lav forvrængning for at undgå laderens fejlfungering.
XI. Missionsspecifik ladestyring
A. Driftsplanlægning
Missionkritiske UAV-drift kræver strukturerede ladeplaner, herunder fuld opladning før missionen, køling mellem missioner og konditionering af opbevaring efter missionen.
B. Sundhedsovervågning
Overvågning af indre modstand, temperaturhistorik og spændingsafvigelse gør det muligt at udføre forudsigende vedligeholdelse og tidlig opdagelse af defekte batteripakker.
Konklusion
Opladning af UAV-batterier er en teknisk proces med flere begrænsninger, der påvirkes af elektrokemisk adfærd, termiske dynamikker og driftskrav. Effektive ladeprotokoller forbedrer sikkerheden, forlænger levetiden og øger missionspålideligheden. En systemniveau-forståelse af disse begrænsninger er afgørende for både forskere og praktikere inden for energistyring af UAV’er.
