
Abstraktno
Moduli za shranjevanje energije na osnovi litijeve kemije so temeljni za delovanje sodobnih brezpilotnih letalnih plovil (UAV). Čeprav se te baterije redno polnijo v terenskih in laboratorijskih okoljih, je sam postopek polnjenja podrejen nizu elektrokemičnih, toplotnih in operativnih omejitev, ki jih pogosto podcenjujemo. Odstopanja od ustrezne polnilne obratne temperature pospešujejo strukturno degradacijo, zmanjšujejo razpoložljivo kapaciteto in povečujejo verjetnost katastrofalne odpovedi. V tej študiji ponovno preučujemo polnjenje UAV-baterij z vidika sistemskega inženirstva in poudarjamo medsebojno povezanost med celično kemijo, algoritmi polnjenja, okoljskimi mejami in zahtevami na ravni misije. Analiza združuje inženirska načela v enotni okvir, primeren za raziskovalce in operaterje UAV-jev.
Ključne besede— Energijski sistemi UAV-jev, litijeve baterije, regulacija polnjenja, toplotne omejitve, operativna varnost.
I. Uvod
Ponovno polnljive litijeve baterije so postale prevladujoč vir energije za majhne zračne robotske platforme zaradi njihove ugodne mase-specifične energije in sposobnosti vzdrževanja visokih prehodnih obremenitev. Kljub njihovi razširjenosti ostaja polnjenje teh baterij netrivialna inženirska naloga. Postopek polnjenja je omejen s kinetiko litijevega vstajanja, stabilnostjo trdne elektrolitske meje (SEI) in toplotnim obnašanjem celic v sklopu. Te omejitve določajo stroge meje napetosti, toka in temperature med polnjenjem. Ko se brezpilotna letala (UAV) premikajo iz rekreacijskih naprav k nalogam, ki so ključne za uspeh misije, postane potreba po natančno določenih postopkih polnjenja vedno pomembnejša. V tem članku analiziramo postopek polnjenja z večplastnega inženirskega vidika, pri čemer združujemo elektrokemične osnove z operativnimi zahtevami za brezpilotna letala.
II. Arhitekture baterij na platformah UAV
A. Celične baterije z polimernim elektrolitom v torbicah
Polimerno-elektrolitske celice v torbici, ki se pogosto imenujejo litijeve polimerne baterije (LiPo), uporabljajo laminirane elektrodne sklope in gelast elektrolit. Njihova mehanska gibljivost omogoča visoko energijsko gostoto, hkrati pa povečuje tudi občutljivost za odpoved zaradi deformacije.
B. Cilindrične in prizmatične litijeve celice
Litijeve celice z togimi ohišji kažejo izboljšano strukturno trdnost in daljšo življenjsko dobo. Njihovo elektrokemijsko obnašanje določajo dinamika vstavljanja (interkalacije) znotraj slojevitih ali spinelnih katodnih struktur. Čeprav je njihova razbremenska zmogljivost nižja kot pri LiPo celicah, jih zaradi boljše toplotne stabilnosti in predvidljivih lastnosti staranja naredi primernimi za brezpilotna letala (UAV), ki so namenjena trajnosti.
C. Baterijski paketi z vgrajeno elektroniko za upravljanje
Napredne platforme za brezpilotna letala (UAV) vključujejo sisteme za upravljanje baterij (BMS), ki nadzorujejo napetosti celic, temperature in operacije uravnoteženja. Ti vgrajeni sistemi uveljavljajo delovne meje in zagotavljajo diagnostične informacije, vendar ne odpravljajo potrebe po nadzorovanih okoljih za polnjenje.
III. Ocena pred polnjenjem
A. Ocena strukturne celovitosti

Pred začetkom polnjenja je treba baterijo oceniti za mehanske nepravilnosti. Deformacija, nabiranje plina ali ostanki elektrolita kažejo na poškodovano notranjo strukturo. Takšni pogoji spreminjajo notranjo impedanco in lahko povzročijo toplotno nestabilnost med polnjenjem.
B. Preverjanje toplotnega stanja
Temperatura sklopa celic močno vpliva na sprejem polnjenja. Polnjenje pri nizkih temperaturah upočasni difuzijo litija in spodbuja odlaganje kovinskega litija, medtem ko visoke temperature pospešujejo parazitske reakcije. Zato je pred polnjenjem potrebno toplotno uravnoteženo stanje.
C. Skladnost nastavitve polnilnika
Za pakete brez vgrajene elektronike za upravljanje mora biti polnilnik nastavljen tako, da ustreza številu celic in kemiji paketa. Napačna nastavitev spremeni zgornjo napetostno mejo ali profil toka, kar povzroči pospešeno degradacijo ali takojšnjo odpoved.
IV. Mehanizmi regulacije polnjenja
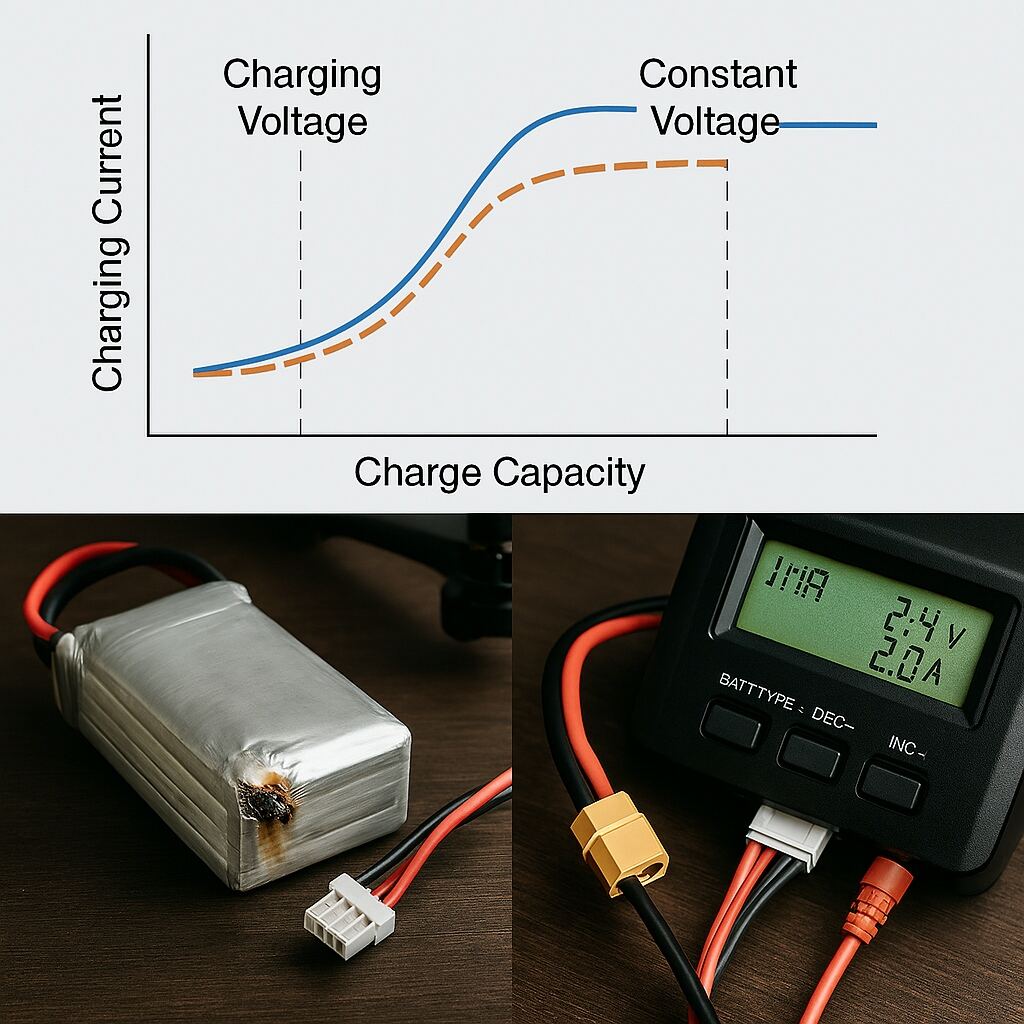
A. Dvo-fazno krmiljenje polnjenja
Litijeve baterije se običajno polnijo z dvofaznim regulacijskim postopkom. V začetni fazi se ohranja konstanten tok, kar omogoča naraščanje napetosti celice v skladu z njeno notranjo impedanco. Ko napetost doseže zgornjo mejo, polnilnik preklopi na fazo konstantne napetosti, v kateri tok postopoma pada. Ta pristop zmanjšuje obremenitev na meji med elektrodo in elektrolitom.
B. Izenačevanje med celicami
Večcelični paketi zahtevajo izenačevanje, da se prepreči razhajanje napetosti med celicami. Brez uravnavanja najšibkejša celica določa uporabno kapaciteto, najmočnejša celica pa je med polnjenjem ogrožena z nadnapetostjo. Izenačevalne vezje porabijo ali preusmerijo naboj, da ohranijo enakomernost po celotnem paketu.
C. Izbira toka in obravnava degradacije
Tok polnjenja je običajno izražen kot delež nazivne kapacitete paketa. Višji tokovi skrajšajo čas polnjenja, vendar povečajo toplotno obremenitev in pospešijo rast SEI-plasti. Nižji tokovi zmanjšujejo degradacijo, vendar podaljšajo čas priprave, kar ustvarja kompromis med operativno hitrostjo in življenjsko dobo baterije.
V. Postopek polnjenja in okoljski zahtevki
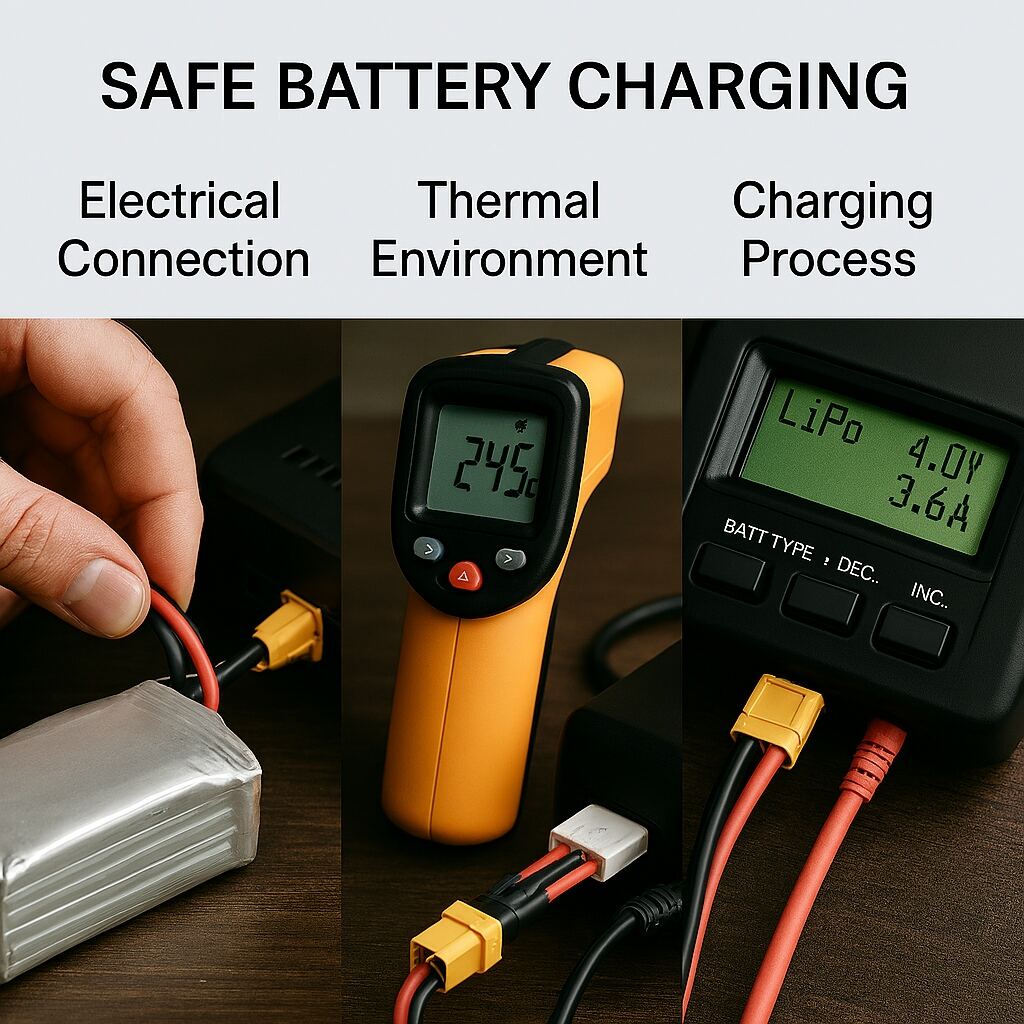
A. Električni vmesnik in vrstni red priključitve
Za polnjenje je potrebna varna priključitev tako glavnih močnostnih vodnikov kot tudi izravnalnega priključka (za LiPo pakete). Napačen vrstni red priključitve ali ohlapni stiki povzročajo upornostno segrevanje in nestabilnost napetosti.
B. Fizično okolje za polnjenje
Nabijalno okolje mora zmanjšati toplotno nabiranje in odpraviti vire vžiga. Nezgorljive površine in ustrezna zračna cirkulacija sta nujna. Akumulatorje ne smejo postavljati v omejene prostore, kjer se toplota ne more razpršiti.
C. Spremljanje parametrov v realnem času
Med nabijanjem je treba spremljati temperaturo, enakomernost napetosti in zmanjševanje toka. Odstopanja od pričakovanega obnašanja kažejo na notranje anomalije, kot so naraščanje impedance ali lokalno segrevanje.
D. Stabilizacija po nabijanju
Po nabijanju akumulator preide v kratek obdobje relaksacije, med katerim se razpršijo notranji gradienti. Ta stabilizacija izboljša natančnost napetosti in zmanjša termični stres pred vključitvijo v obratovanje ali shranitvijo.
VI. Varnostni pogoji in poti odpovedi
A. Mehanizmi termične nestabilnosti
Toplotni zagon nastane, ko eksotermne reakcije presegajo sposobnost celice za odvajanje toplote. Prekomerno napetost, notranji kratek stik in mehanska poškodba lahko sprožijo take reakcije. Preventivni ukrepi vključujejo nadzorovane okolja za polnjenje ter neprekinjeno spremljanje.
B. Občutljivost na okolje
Vlažnost, neposredna sončna svetloba in zaprta prostora spremenijo toplotne robne pogoje baterije. Polnjenje v takšnih pogojih poveča verjetnost presega varnih obratovalnih mej.
VII. Polnjenje nadzorovanih baterijskih sistemov
A. Vgrajene nadzorne funkcije
Pametne baterije vključujejo mikrokrmilnike, ki regulirajo parametre polnjenja, spremljajo stanje celic in uveljavljajo varnostne omejitve. Ti sistemi zmanjšujejo obremenitev operaterja, vendar je še naprej potrebno spoštovati okoljske in toplotne omejitve.
B. Operativni delovni tok
Policanje se običajno izvaja prek posebne vmesnika ali koncentratorja, ki komunicira z vgrajenim krmilnikom. Sistem samodejno upravlja funkcije uravnavanja in zaščite.
C. Delovne omejitve
Čeprav so pametne baterije izjemno napredne, ostajajo občutljive na ekstremne temperature in dolgotrajno shranjevanje pri visoki stopnji napolnjenosti. Njihove zaščitne funkcije ne morejo nadomestiti nepravilne rabe.
VIII. Delovne napake in njihove inženirske posledice
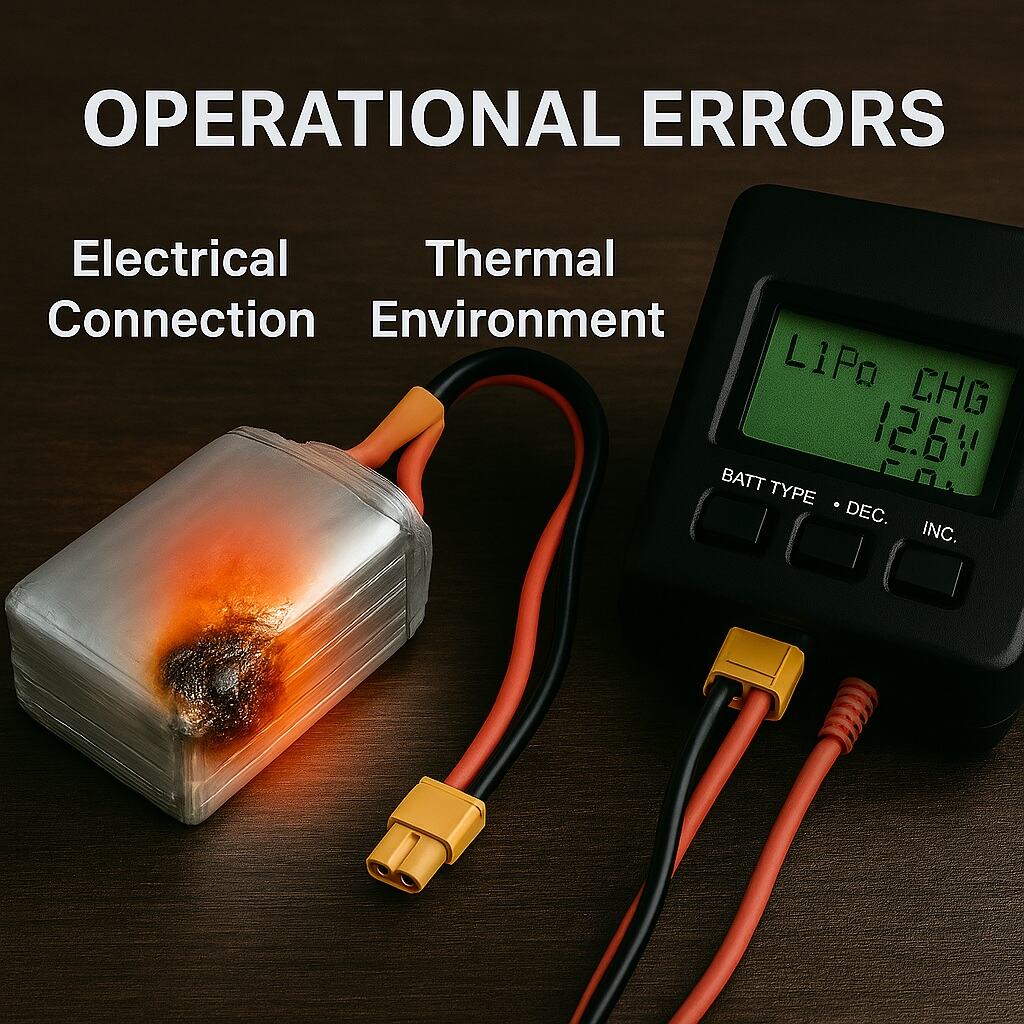
Pogoste delovne napake vključujejo začetek polnjenja takoj po razbremenitvi pri visoki obremenitvi, uporabo poškodovanih priključkov, uporabo prekomernega toka ter polnjenje v termično nestabilnih okoljih. Te prakse pospešujejo rast impedance, zmanjšujejo število ciklov in povečujejo verjetnost odpovedi.
IX. Strategije za podaljšanje življenjske dobe baterije
A. Umerjene hitrosti polnjenja
Nižji tokovi polnjenja zmanjšujejo toplotno obremenitev in upočasnjene degradacijske mehanizme.
B. Nadzorovano stanje shranjevanja
Vzdrževanje akumulatorja pri srednjem naboju med shranjevanjem zmanjša kemično staranje.
C. Vrtenje na ravni flote
Razporeditev uporabe med več akumulatorskimi paketi preprečuje neenakomerno staranje in izboljša skupno zanesljivost flote.
D. Vzdrževanje električnega vmesnika
Redno čiščenje priključkov zmanjšuje upornostne izgube in izboljša učinkovitost polnjenja.
X. Polnjenje v nestandardnih pogojih
A. Delovanje pri nizkih temperaturah
Polnjenje pri nizkih temperaturah zahteva predogrev in zmanjšano tokovno moč, da se prepreči litijev odlagati.
B. Delovanje pri visokih temperaturah
Polnjenje v vročih okoljih zahteva aktivno hlajenje ali preselitev v termično stabilna območja.
C. Omejitve polnjenja na terenu
Prenosni viri energije morajo zagotavljati stabilno napetost in valovne oblike z nizko izoblikovanostjo, da se prepreči okvara polnilnika.
XI. Polnjenje, usmerjeno v opravljanje naloge
A. Operativno načrtovanje
Za operacije brezpilotnih letalnikov (UAV), ki so ključne za izvedbo naloge, so potrebni strukturirani urniki polnjenja, vključno s popolnim polnjenjem pred nalogo, ohlajanjem med posameznimi nalogami in pripravo akumulatorjev za shranjevanje po opravljeni nalogi.
B. Spremljanje stanja
Spremljanje notranje odpornosti, zgodovine temperature in odstopanja napetosti omogoča prediktivno vzdrževanje in zgodnje zaznavanje odpovedi akumulatorskih sklopov.
XII. Zaključek
Polnjenje akumulatorjev za brezpilotne letalnike je inženirska naloga z več omejitvami, ki jo določajo elektrokemijsko obnašanje, toplotne dinamike in operativne zahteve. Učinkoviti protokoli polnjenja izboljšujejo varnost, podaljšujejo življenjsko dobo in povečujejo zanesljivost opravljanja nalog. Sistemskega razumevanja teh omejitev zahtevajo tako raziskovalci kot strokovnjaki na področju energetskega upravljanja brezpilotnih letalnikov.
