
Abstrakti
Litiumpohjaiset energiavarastomoduulit ovat keskeisiä nykyaikaisten ohjaamattomien ilmalaiteiden (UAV) toiminnalle. Vaikka näitä akkuja ladataan tavallisesti kentällä ja laboratoriossa, latausprosessi itsessään noudattaa joukkoa sähkökemiallisia, lämpötilallisia ja käyttöolosuhteisiin perustuvia rajoituksia, joita usein aliarvioidaan. Poikkeamat sopivista latausolosuhteista kiihdyttävät rakenteellista rappeutumista, vähentävät saatavilla olevaa kapasiteettia ja lisäävät katastrofaalisen vian todennäköisyyttä. Tässä tutkimuksessa tarkastellaan uudelleen UAV-akkujen latausta järjestelmäinsinöörin näkökulmasta, korostamalla solukemian, latausalgoritmien, ympäristörajoitusten ja tehtäväkohtaisten vaatimusten välistä vuorovaikutusta. Analyysi tiivistää insinööriperiaatteet yhtenäiseksi kehykseksi, joka soveltuu UAV-tutkijoille ja -käyttäjille.
Avainsanat— UAV:n energijärjestelmät, litiumpohjaiset akut, latauksen säätö, lämpötilalliset rajoitukset, käyttöturvallisuus.
I. Johdanto
Uudelleenladattavat litiumparistot ovat nousseet pienien ilmalla toimivien robottialustojen hallitsevaksi energialähteeksi niiden suotuisan massakohtaisen energian ja kykyyn kestää korkeita hetkellisiä kuormia ansiosta. Vaikka nämä paristot ovatkin yleisiä, niiden lataaminen säilyy edelleen epätriviaalina insinööritehtävänä. Latausprosessi on rajoitettu litiumin interkalointikinetiikalla, kiinteän elektrolyyttirajan (SEI) stabiilisuudella ja solupakan lämmönkäyttäytymisellä. Nämä rajoitukset asettavat tiukat rajat jännitteelle, virralle ja lämpötilalle latauksen aikana. Kun UAV:t siirtyvät harrastuslaitteista tehtäväkriittisiksi varusteiksi, tiukasti määriteltyjen latausmenettelyjen tarve kasvaa entisestään. Tässä artikkelissa analysoidaan latausprosessia monitasoisesta insinöörimielikuvasta lähtien, yhdistäen sähkökemialliset perusteet UAV:n käyttövaatimuksiin.
II. Paristoarkkitehtuurit UAV-alustoissa
A. Polymeerielektrolyyttiset pussisolut
Polymeri-elektrolyyttiset pussikennot, joita yleisesti kutsutaan LiPo-akunimikkeellä, käyttävät laminoituja elektrodipinoja ja geelimaista elektrolyyttiä. Niiden mekaaninen joustavuus mahdollistaa korkean energiatiukkuuden, mutta lisää myös alttiutta muodonmuutoksiin liittyvälle vialle. Jännitealue on tiukasti rajoitettu elektrolyytin stabiilisuuden mukaan, ja ylärajan ylittäminen aloittaa peruuttamattomia sivureaktioita.
B. Sylinterimäiset ja prismaattiset litiumioniakut
Jäykällä kotelolla varustetut litiumioniakut ovat rakenteellisesti kestävämpiä ja niillä on pidempi kierrosluku. Niiden sähkökemiallinen käyttäytyminen määräytyy kerros- tai spinelikatodirakenteissa tapahtuvan interkaloinnin dynamiikan mukaan. Vaikka niiden purkukyky on alhaisempi kuin LiPo-akkujen, niiden lämpötilavakaus ja ennustettavat vanhenemisominaisuudet tekevät niistä sopivia kestoisuuteen suunnattuihin UAV-lentolaitteisiin.
C. Akkupaketit upotetulla hallintaelektroniikalla
Edistyneet UAV-alustat sisältävät akkujen hallintajärjestelmiä (BMS), jotka valvovat solujen jännitteitä, lämpötiloja ja tasausoperaatioita. Nämä upotetut järjestelmät varmistavat toiminnalliset rajat ja tarjoavat diagnostiikkatietoja, mutta ne eivät poista tarvetta ohjattuihin latausympäristöihin.
III. Ennenlatauksen arviointi
A. Rakenteellisen eheytteen arviointi

Ennen latauksen aloittamista akkua on arvioitava mekaanisilta poikkeamilta. Muodonmuutos, kaasun kertyminen tai elektrolyyttijäämä viittaavat vaurioituneeseen sisäiseen rakenteeseen. Tällaiset olosuhteet muuttavat sisäistä impedanssia ja voivat aiheuttaa lämpöepävakautta latauksen aikana.
B. Lämpötilatilan varmistus
Solupakan lämpötila vaikuttaa merkittävästi latauskapasiteettiin. Alhaisessa lämpötilassa tapahtuva lataus hidastaa litiumin diffuusiota ja edistää metallisen litiumin saostumista, kun taas korkeassa lämpötilassa tapahtuvat haitallisesti kuluttavat reaktiot kiihtyvät. Siksi latauksen aloittamisen edellytyksenä on lämpötilatasapainoinen tila.
C. Laturin määrittelyn yhdenmukaisuus
Paketeissa, joissa ei ole upotettuja hallintaelektroniikkoja, laturin on oltava asetettu vastaamaan paketin kennojen lukumäärää ja kemiallista koostumusta. Virheellinen asetus muuttaa jännitteen ylärajaa tai virran profiilia, mikä johtaa nopeutettuun vanhenemiseen tai välittömään vikaantumiseen.
IV. Lataussäätömekanismit
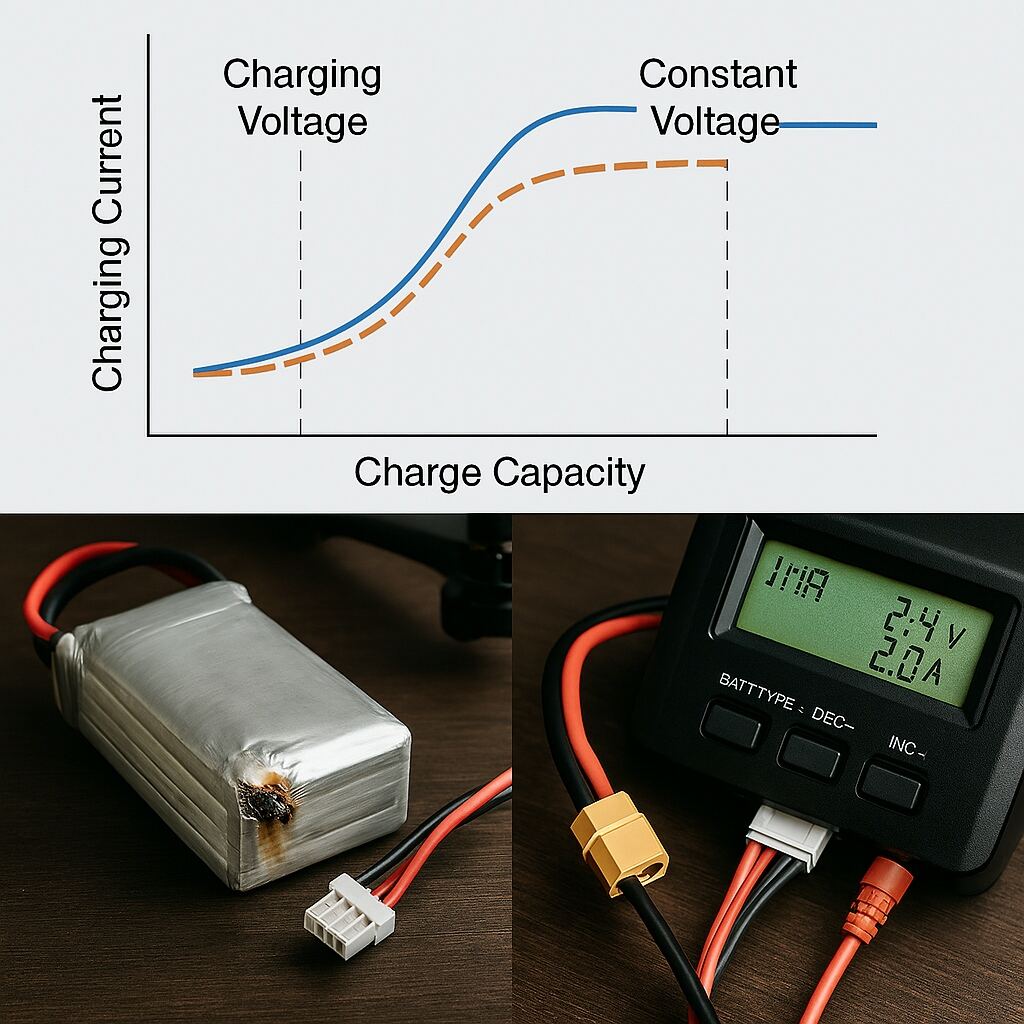
A. Kaksivaiheinen lataussäätö
Litiumperusteisia akkuja ladataan yleensä kaksivaiheisella säätömenetelmällä. Alkuvaiheessa ylläpidetään vakiovirtaa, jolloin kennojännite nousee sen sisäisen impedanssin mukaisesti. Kun jännite saavuttaa ylärajan, laturi siirtyy vakiojännitetilaan, jossa virta vähenee asteikollisesti. Tämä menetelmä vähentää rasitusta elektrodi–elektrolyytti-rajapinnalla.
B. Kennojen välinen tasapainotus
Monisoluisten akkupakkojen tasaus on tarpeen estääkseen solujen jännitteiden hajaantumista. Ilman tasausta heikoin solu määrittää käytettävissä olevan kapasiteetin, ja vahvin solu saattaa ylijännittyä latauksen aikana. Tasauspiirit hajottavat tai uudelleenjakavat varauksen säilyttääkseen yhtenäisyyden koko akkupakassa.
C. Virran valinta ja vanhenemisen huomioon ottaminen
Latausvirta ilmoitetaan yleensä osana akkupakun nimelliskapasiteetista. Korkeammat virrat lyhentävät latausaikaa, mutta lisäävät lämpökuormitusta ja kiihdyttävät SEI-kerroksen kasvua. Alhaisemmat virrat vähentävät vanhenemista, mutta pidentävät kiertoaikaa, mikä luodaan kompromissin välille toiminnan tahti ja akun kestävyys.
V. Latausmenettely ja ympäristövaatimukset
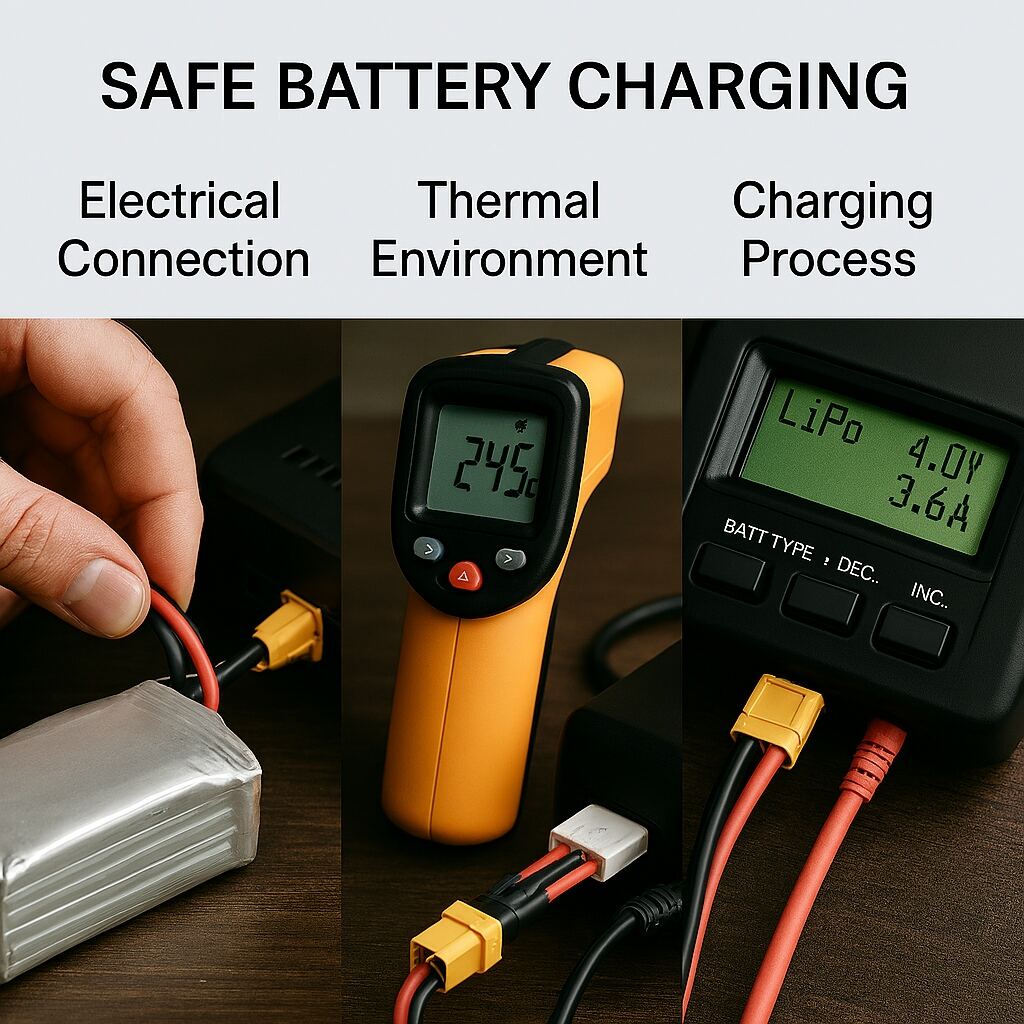
A. Sähköinen liitäntä ja liittämisjärjestys
Lataus vaatii turvallisen liittämisen sekä päävirtajohtimien että LiPo-akkupakkojen tasausliittimen kautta. Virheellinen liittämisjärjestys tai löysät liitokset aiheuttavat resistiivistä lämmönmuodostumista ja jännitteen epävakautta.
B. Fyysinen latausympäristö
Latausympäristön on vähennettävä lämmön kertymistä mahdollisimman paljon ja poistettava syttymissuunnat. Palamattomat pinnat ja riittävä ilmanvaihto ovat välttämättömiä. Akkuja ei saa sijoittaa suljettuihin tiloihin, joissa lämpö ei voi häätyä.
C. Reaaliaikainen parametrien seuranta
Latauksen aikana on seurattava lämpötilaa, jännitteen tasaisuutta ja virran heikkenemistä. Poikkeamat odotetusta käyttäytymisestä viittaavat sisäisiin poikkeamiin, kuten impedanssin nousuun tai paikallisesti kohonneeseen lämpötilaan.
D. Latauksen jälkeinen vakautuminen
Latauksen jälkeen akku kuluttaa lyhyen lepokauden, jonka aikana sisäiset gradientit häätyvät. Tämä vakautuminen parantaa jännitteen tarkkuutta ja vähentää lämpöstressiä ennen käyttöönottoa tai varastointia.
VI. Turvallisuusrajoitukset ja vian kehityspolut
A. Lämpöepävakausmekanismit
Lämpötilan karkaaminen syntyy, kun eksotermiset reaktiot ylittävät akkukennon kyvyn hajottaa lämpöä. Ylijännite, sisäiset oikosulut ja mekaaninen vaurio voivat aloittaa tällaiset reaktiot. Ehkäiseviä toimenpiteitä ovat muun muassa valvotut latausympäristöt ja jatkuvan seuranta.
B. Ympäristöherkkyys
Kosteus, suora auringonsäteily ja suljetut tilat muuttavat akun lämpörajaehtoja. Lataaminen näissä olosuhteissa lisää mahdollisuutta ylittää turvalliset käyttörajat.
VII. Hallittujen akkujärjestelmien lataaminen
A. Upotetut valvontafunktiot
Älykkäät akut sisältävät mikro-ohjaimia, jotka säädövät latausparametreja, seuraavat kennojen kuntoa ja varmistavat turvallisuusrajojen noudattamisen. Nämä järjestelmät vähentävät käyttäjän kuormitusta, mutta niiden käytössä on edelleen noudatettava ympäristö- ja lämpörajoituksia.
B. Toimintatyönkulku
Lataus tapahtuu yleensä erityisen liittimen tai keskukseen kautta, joka kommunikoi upotetun ohjaimen kanssa. Järjestelmä hallinnoi tasapainotus- ja suojatoiminnot autonomisesti.
C. Toiminnalliset rajoitukset
Vaikka älykkäät akut ovatkin monitasoisia, ne ovat edelleen herkkiä lämpötilan äärimmäisyyksille ja pitkäaikaiselle korkeassa lataustasossa säilytetylle akulle. Niiden suojatoiminnot eivät voi kompensoida epäasianmukaista käsittelyä.
VIII. Toiminnalliset virheet ja niiden tekniset seuraukset
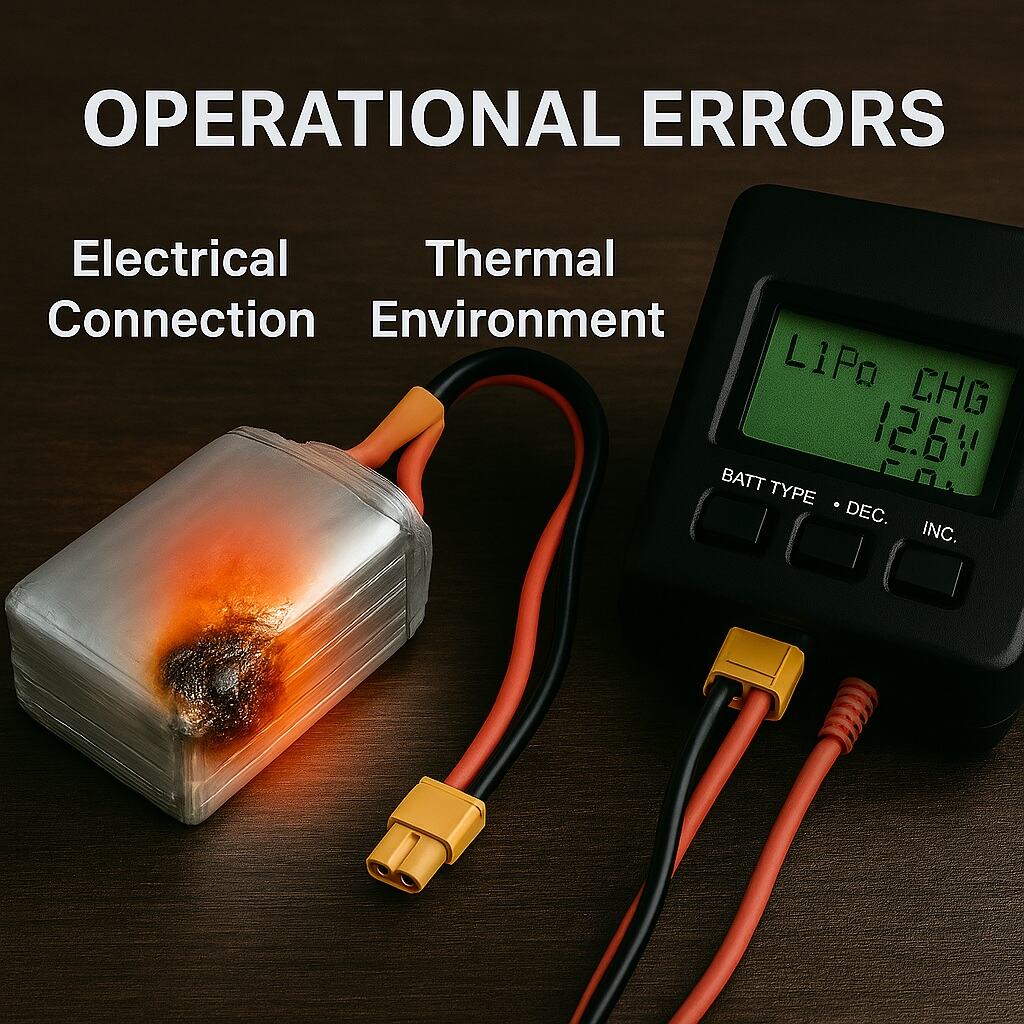
Yleisiä toiminnallisia virheitä ovat korkean kuorman aiheuttaman purkamisen jälkeinen välitön latauksen aloittaminen, vaurioituneiden liittimien käyttö, liiallisen virran käyttö ja lataaminen lämpötilallisesti epävakaissa ympäristöissä. Nämä käytännöt kiihdyttävät impedanssin kasvua, lyhentävät kiertokertojen määrää ja lisäävät vian todennäköisyyttä.
IX. Akun käyttöiän pidentämiseen tähtäävät strategiat
A. Hillitty latausnopeus
Alhaisemmat latausvirrat vähentävät lämpökuormitusta ja hidastavat rappeutumismekanismeja.
B. Hallittu säilytystila
Akun säilyttäminen varastoinnissa keskitilassa vähentää kemiallista ikääntymistä.
C. Laajamittainen kiertokäyttö
Käytön jakaminen useiden akkupakkojen kesken estää epätasaista ikääntymistä ja parantaa koko laitoksen luotettavuutta.
D. Sähköliitäntöjen huolto
Liittimien ajoittainen puhdistus vähentää resistiivisiä tappioita ja parantaa lataustehokkuutta.
X. Lataus epästandardien olosuhteiden alla
A. Toiminta alhaisessa lämpötilassa
Lataus alhaisessa lämpötilassa vaatii akun esilämmitystä ja virran vähentämistä litiumsaostumien välttämiseksi.
B. Toiminta korkeassa lämpötilassa
Lataus kuumissa ympäristöissä edellyttää aktiivista jäähdytystä tai siirtämistä lämpötilaltaan vakaita alueita.
C. Kenttälatausrajoitukset
Kannettavien virtalähteiden on tuotettava vakaita jännitteitä ja vähän vääristyneitä aaltomuotoja, jotta laturin toiminta ei häiriiny.
XI. Tehtäväkeskeinen lataushallinta
A. Toimintasuunnittelu
Tehtävänärikkaiden UAV-toimintojen suorittamiseen vaaditaan rakennettuja latausajastuksia, mukaan lukien tehtävää edeltävä täyslataus, tehtävien välillä tapahtuva jäähdytys ja tehtävän jälkeinen varastointiolosuhteiden säätö.
B. Terveyden seuranta
Sisäisen vastuksen, lämpötilahistorian ja jännitepoikkeaman seuraaminen mahdollistaa ennakoivan huollon ja heikentyvien akkupakkausten varhaisen havaitsemisen.
12. päätelmä
UAV-akkujen lataaminen on monitasoinen rajoitusten määrittämä insinöörityöprosessi, jota ohjaavat elektrokemialliset ilmiöt, lämpödynamiikka ja käyttövaatimukset. Tehokkaat latausprotokollat parantavat turvallisuutta, pidentävät käyttöikää ja lisäävät tehtävien luotettavuutta. Näiden rajoitusten systeemitasoinen ymmärtäminen on välttämätöntä sekä tutkijoille että käytännön ammattilaisille UAV:n energianhallinnassa.
