
Abstrakt
Energilagringsmoduler basert på litiumkjemi er grunnleggende for driften av moderne ubemannede luftfartøy (UAV-er). Selv om disse batteriene vanligvis lades i felt- og laboratoriemiljøer, styres ladeprosessen selv av et sett med elektrokjemiske, termiske og operative begrensninger som ofte undervurderes. Avvik fra riktige ladebetingelser akselererer strukturell nedbrytning, reduserer tilgjengelig kapasitet og øker sannsynligheten for katastrofal svikt. Denne studien undersøker på nytt ladeprosessen for UAV-batterier fra et systemteknisk perspektiv, med vekt på interaksjonen mellom cellekjemi, ladealgoritmer, miljømessige grenser og krav på oppgåvnivå. Analysen samler tekniske prinsipper inn i en enhetlig ramme som er egnet for forskere og operatører innen UAV-sektoren.
Stikkord— UAV-energisystemer, batterier basert på litium, laderegulering, termiske begrensninger, operativ sikkerhet.
I. Innledning
Oppladbare litiumbatterier har blitt den dominerende energikilden for små luftbårne robotplattformer på grunn av deres gunstige spesifikke energi per masse og evne til å håndtere høye transiente laster. Selv om de er svært utbredt, forblir oppladingen av disse batteriene en ikke-triviell ingeniøroppgave. Oppladingsprosessen er begrenset av kinetikken til litiuminterkalering, stabiliteten til fast-elektrolyttgrensesnittet (SEI) og termisk oppførsel til cellestabelen. Disse begrensningene setter strenge krav til spenning, strøm og temperatur under opplading. Ettersom UAV-er utvikler seg fra rekreasjonsutstyr til oppdragskritiske aktiva, blir behovet for strengt definerte oppladingsprosedyrer stadig viktigere. Denne artikkelen analyserer oppladingsprosessen fra et flerlaget ingeniørperspektiv, der elektrokjemiske grunnprinsipper integreres med operative krav til UAV-er.
II. Batteriarkitekturer i UAV-plattformer
A. Polymer-elektrolytt-poseceller
Polymer-elektrolytt-sakkceller, som vanligvis kalles LiPo-batterier, bruker laminerte elektrodestabler og en gelaktig elektrolytt. Deres mekaniske fleksibilitet muliggjør høy energitetthet, men øker også sårbarheten for deformasjonsforårsaket svikt. Spenningsområdet er strengt begrenset av elektrolyttens stabilitet, og å overskride den øvre terskelen utløser irreversible sidereaksjoner.
B. Sylindriske og prismeformede litium-ionceller
Litium-ionceller med stive omslag viser forbedret strukturell robusthet og lengre syklusliv. Deres elektrokjemiske oppførsel styres av interkalasjonsdynamikken i lagdelte eller spinel-katodestrukturer. Selv om deres utladningsevne er lavere enn den til LiPo-cellene, gjør deres termiske stabilitet og forutsigbare aldrendeegenskaper dem egnet for UAV-er der varighet er avgjørende.
C. Batteripakker med integrert styringselektronikk
Avanserte UAV-plattformer integrerer batteristyringssystemer (BMS) som overvåker celle-spenninger, temperaturer og balanseringsoperasjoner. Disse innbygde systemene håndhever driftsgrenser og gir diagnostisk informasjon, men de eliminerer ikke behovet for kontrollerte ladeomgivelser.
III. Vurdering før ladning
A. Vurdering av strukturell integritet

Før ladning påbegynnes, må batteriet vurderes for mekaniske avvik. Deformasjon, gassakkumulering eller elektrolyttavleiring indikerer en svekket intern struktur. Slike forhold endrer den interne impedansen og kan utløse termisk ustabilitet under ladning.
B. Verifikasjon av termisk tilstand
Temperaturen til cellestabelen påvirker kraftig ladningsmottak. Ladning ved lav temperatur senker litiumdiffusjonen og fremmer avsetning av metallisk litium, mens høy temperatur akselererer parasittiske reaksjoner. En termisk likevektsstatus er derfor påkrevd før ladning.
C. Konsistens i laderkonfigurasjon
For pakker uten innebygde styringselektronikker må laderen konfigureres for å matche pakkens antall celler og kjemi. Feil konfigurasjon endrer spenningsgrensen eller strømprofilen, noe som fører til raskere nedbrytning eller umiddelbar svikt.
IV. Mekanismer for laderegulering
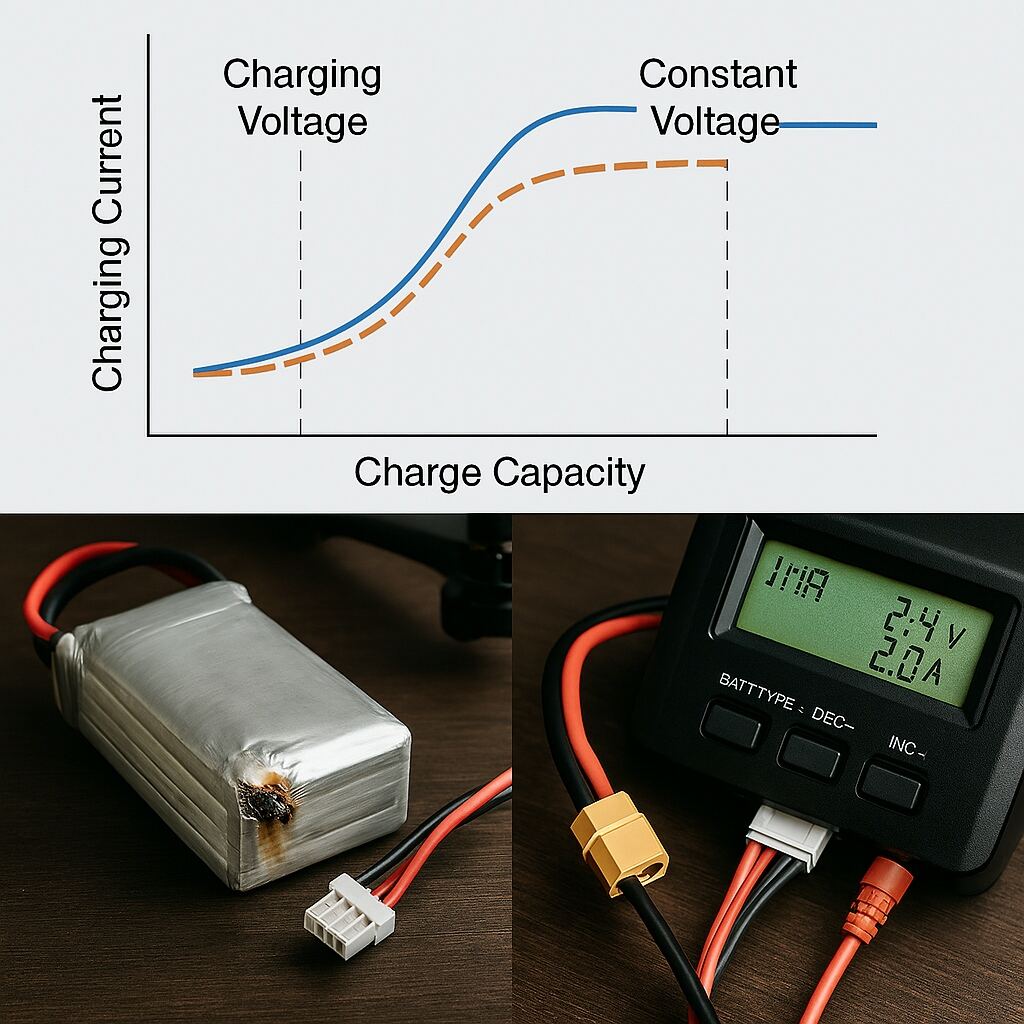
A. To-trinns ladestyring
Lithiumbaserte batterier lades vanligvis ved hjelp av et to-trinns reguleringsskjema. Det første trinnet opprettholder en konstant strøm, slik at cellespenningen stiger i henhold til dens indre impedans. Når spenningen når den øvre terskelen, skifter laderen til et konstant-spenningstrinn, der strømmen gradvis avtar. Denne fremgangsmåten minimerer belastningen på elektrode–elektrolytt-grensesnittet.
B. Mellomcellebalansering
Flercellepakker krever balansering for å forhindre spenningsavvik mellom cellene. Uten balansering bestemmer den svakest cellen den bruksbare kapasiteten, og den sterkest cellen risikerer over-spending under lading. Balanseringskretser dissiperer eller omfordeler ladning for å opprettholde jevnhet i hele pakken.
C. Valg av strøm og vurderinger knyttet til nedbrytning
Ladestrømmen uttrykkes vanligvis som en brøkdel av pakkens nominelle kapasitet. Høyere strømmer reduserer ladetiden, men øker termisk belastning og akselererer SEI-vekst. Lavere strømmer reduserer nedbrytning, men forlenger gjennomføringstiden, noe som skaper en avveining mellom driftshastighet og batteriets levetid.
V. Ladeprosedyre og miljøkrav
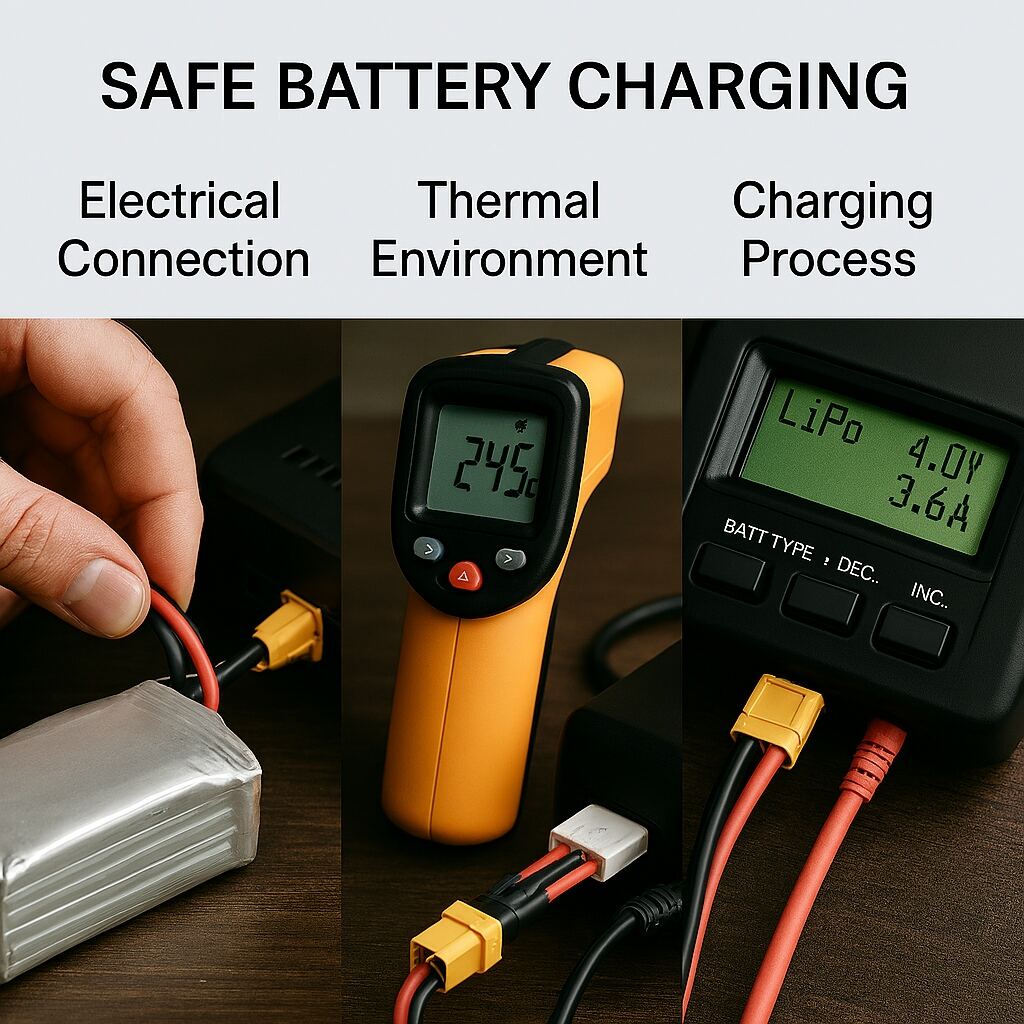
A. Elektrisk grensesnitt og tilkoblingsrekkefølge
Lading krever sikker tilkobling av både hovedstrømledningene og, for LiPo-pakker, balanseringskontaktene. Feil rekkefølge ved tilkobling eller løse forbindelser fører til resistiv oppvarming og spenningsustabilitet.
B. Fysisk lademiljø
Lademiljøet må minimere varmeopphoping og eliminere tennerkilder. Ikke-brennbare overflater og tilstrekkelig luftstrøm er avgjørende. Batterier bør ikke plasseres i begrensede rom der varme ikke kan avledes.
C. Overvåking av parametre i sanntid
Under opplading må temperatur, spenningsjevnhet og strømavtag overvåkes. Avvik fra forventet oppførsel indikerer interne unormaliteter, som økende impedans eller lokal oppvarming.
D. Stabilisering etter opplading
Etter opplading gjennomgår batteriet en kort avslapningsperiode der interne gradienter avtar. Denne stabiliseringen forbedrer spenningsnøyaktigheten og reduserer termisk stress før utsetting eller lagring.
VI. Sikkerhetsbegrensninger og sviktveier
A. Mekanismer for termisk ustabilitet
Termisk løsning oppstår når eksotermiske reaksjoner overgår battericellens evne til å avlede varme. For høy spenning, interne kortslutninger og mekanisk skade kan utløse slike reaksjoner. Forebyggende tiltak inkluderer kontrollerte ladeomgivelser og kontinuerlig overvåking.
B. Miljøfølsomhet
Fuktighet, direkte solstråling og lukkede rom endrer de termiske grensebetingelsene for batteriet. Å lade under slike forhold øker sannsynligheten for at sikre driftsgrenser overskrides.
VII. Lading av overvåkede batterisystemer
A. Integrerte overvåkningsfunksjoner
Smarte batterier inneholder mikrokontrollere som regulerer ladeparametre, overvåker cellehelse og håndhever sikkerhetsgrenser. Disse systemene reduserer operatørens belastning, men krever likevel at miljømessige og termiske begrensninger følges.
B. Driftsprosess
Lading skjer vanligvis via en dedikert grensesnitt eller hub som kommuniserer med den integrerte kontrolleren. Systemet håndterer automatisk balanserings- og beskyttelsesfunksjoner.
C. Driftsbegrensninger
Selv om smarte batterier er sofistikerte, er de fortsatt følsomme for ekstreme temperaturer og langvarig lagring ved høy ladestatus. Deres beskyttelsesfunksjoner kan ikke kompensere for feilaktig håndtering.
VIII. Driftsfeil og deres ingeniørmessige konsekvenser
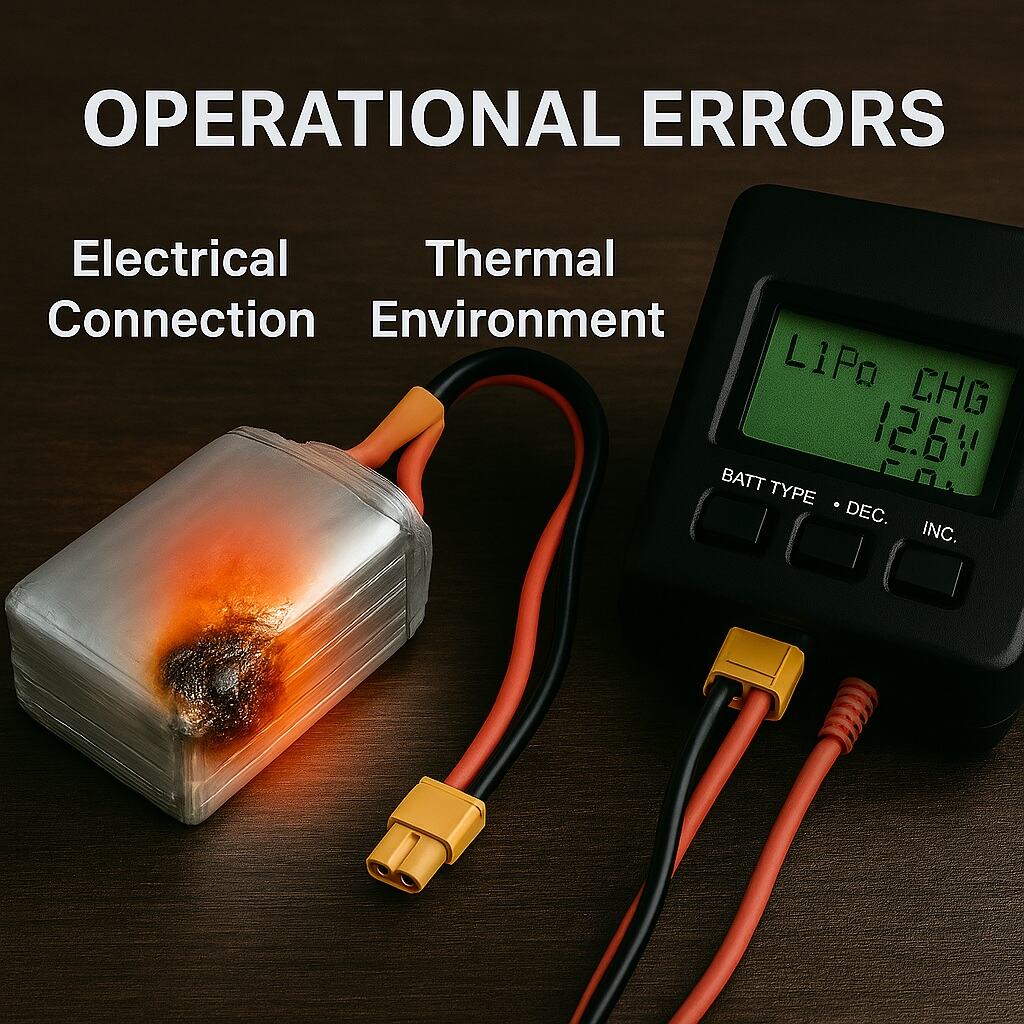
Vanlige driftsfeil inkluderer å starte lading umiddelbart etter utladning under høy belastning, bruk av skadede kontakter, påføring av for høy strøm og lading i termisk ustabile miljøer. Slike praksiser akselererer impedansøkningen, reduserer sykluslivet og øker sannsynligheten for svikt.
IX. Strategier for å forlenge batteriets levetid
A. Modererte laderater
Lavere ladestrømmer reduserer termisk stress og senker hastigheten på forfallsprosesser.
B. Kontrollert lagringsstatus
Å holde batteriet på en mellomliggende ladestatus under lagring minimerer kjemisk aldring.
C. Rotasjon på flåtnivå
Å fordele bruken på flere batteripakker hindrer ujevn aldring og forbedrer den totale flåtens pålitelighet.
D. Vedlikehold av elektrisk grensesnitt
Periodisk rengjøring av kontakter reduserer resistive tap og forbedrer ladeeffektiviteten.
X. Lading under ikke-standardiserte forhold
A. Drift ved lav temperatur
Lading ved lav temperatur krever forvarming og redusert strøm for å unngå litiumavleiring.
B. Drift ved høy temperatur
Lading i varme miljøer krever aktiv nedkjøling eller omflytting til termisk stabile områder.
C. Feltladebegrensninger
Bærbare strømkilder må levere stabil spenning og bølgeformer med lav forvrengning for å unngå feilfunksjon i laderen.
XI. Oppdriftsorientert ladestyring
A. Driftsplanlegging
Oppdragskritiske UAV-drifter krever strukturerte ladeskjemaer, inkludert full ladning før oppdraget, avkjøling mellom oppdragene og tilstandstilpasning under lagring etter oppdraget.
B. Helseovervåking
Å spore indre motstand, temperaturhistorikk og spenningsavvik muliggjør prediktiv vedlikehold og tidlig oppdagelse av batteripakker som svikter.
XII. Konklusjon
Lading av UAV-batterier er en teknisk prosess med flere begrensninger, påvirket av elektrokjemisk atferd, termodynamikk og driftskrav. Effektive ladeprotokoller forbedrer sikkerheten, utvider levetiden og øker påliteligheten til oppdragene. En systemnivåforståelse av disse begrensningene er avgjørende både for forskere og praktikere innen energistyring av UAV-er.
