
Lühikokkuvõte
Energia salvestamise moodulid, mis põhinevad liitiumi keemiakasutusel, on olulised kaasaegsete lennukita õhukorraldussüsteemide (UAV) töö jaoks. Kuigi neid akusid laaditakse tavaliselt väli- ja laboritingimustes, reguleerib laadimisprotsessi ise komplekt elektrokeemilisi, soojuslikke ja toimivusi piiranguid, mida sageli alahinnatakse. Kõrvalekalded sobivatest laadimistingimustest kiirendavad struktuurilist degradatsiooni, vähendavad saadaolevat mahutavust ja suurendavad katastroofliku ebaõnnestumise tõenäosust. See uuring vaatab UAV-de aku laadimist uuesti süsteemitehnoloogilisest vaatenurgast, rõhutades rakupõhise keemia, laadimisalgoritmide, keskkonnapiirangute ja missioonitaseme nõuete vahelist koostööd. Analüüs kogub kokku tehnilised põhimõtted ühtsesse raamistikku, mis on sobiv UAV-uuringute teostajatele ja kasutajatele.
Indeksterminid— UAV-de energiasüsteemid, liitiumipõhised akud, laadimise reguleerimine, soojuslikud piirangud, toimivusohutus.
I. Sissejuhatus
Laaditavad liitiumakud on saanud väikeste õhurobotite platvormide peamiseks energiavaruks nende soodsate massienergiatiheduse ja suure koormuskoormuse talumisvõime tõttu. Kuigi need akud on laialt levinud, nende laadimine jääb siiski keeruliseks insenerülesandeks. Laadimisprotsess on piiratud liitiumi interkalaatsiooni kiirusega, tahke elektrolüütilise piirpinnaga (SEI) stabiilsusega ja rakupaki soojuskäitumisega. Need piirangud määravad rangeid piiranguid laadimisel kasutatavale pingele, voolule ja temperatuurile. Kuna lennukid ilma piloodita (UAV-id) muutuvad üha enam mitte lihtsalt rekreatiivsetest seadmetest, vaid missioonikriitilisteks varadeks, muutub rangelt defineeritud laadimisprotokollide vajadus üha tähtsamaks. Antud artikkel analüüsib laadimisprotsessi mitmekihilisest insenerlikust vaatenurgast, ühendades elektrokeemilised alused UAV-i toimimisnõuetega.
II. Akuarhitektuurid UAV-platvormides
A. Polümeerelektrolüütilised kotikesed
Polümeer-elektrolüütsete põhjaga akude, mida tavaliselt nimetatakse LiPo akuks, kasutatakse laminaatset elektroodide kogumit ja geeljas elektrolüüti. Nende mehaaniline paindlikkus võimaldab kõrget energiatihedust, kuid suurendab ka deformatsioonist tingitud katkemise tõenäosust. Pingeakna piirab täpselt elektrolüüdi stabiilsus ja ülemise läve ületamine käivitab pöördumatud kõrvalreaktsioonid.
B. Silindrilised ja prismaatilised liitium-ioonakud
Riigid korpusega liitium-ioonakud on struktuurilt tugevamad ja nende tsükkeluigus on pikem. Nende elektrokeemilist käitumist määravad interkalatsiooni dünaamika kiht- või spinnelkatoodi struktuurides. Kuigi nende laadimisvõime on väiksem kui LiPo akude oma, teeb nende soojusstabiilsus ja ennustatav vananemiskäitumine neist sobivad pikaajaliste lennukite (UAV) jaoks.
C. Akupakkumid sisemise halduselektroonikaga
Täiustatud UAV-platvormid integreerivad akuhaldussüsteeme (BMS), mis jälgivad rakku pingeid, temperatuure ja tasakaalustamisoperatsioone. Need sisseehitatud süsteemid tagavad toimimispiiride järgimise ja pakuvad diagnostilist teavet, kuid nad ei kaota vajadust kontrollitud laadimiskeskkonnaga.
III. Ennalaadimise hindamine
A. Konstruktsioonilise terviklikkuse hindamine

Enne laadimise alustamist tuleb aku hinnata mehaaniliste anomaliate suhtes. Deformatsioon, gaasi kogunemine või elektrolüüdi jäägid viitavad sisemise struktuuri kahjustumisele. Sellised tingimused muudavad sisemist takistust ja võivad laadimise ajal põhjustada soojuslikku ebastabiilsust.
B. Soojusliku oleku kontroll
Rakkude komplekti temperatuur mõjutab oluliselt laadimisvõimet. Madalatel temperatuuridel toimub liitiumi difusioon aeglasemalt ja tekib metallilise liitiumi sadestumine, samas kui kõrgematel temperatuuridel kiirenevad kõrvalreaktsioonid. Seega on laadimise alustamiseks vajalik soojuslikult tasakaalustatud olek.
C. Laadija seadistuse kooskõla
Pakendite puhul, milles puudub sisseehitatud juhtimiselektroonika, tuleb laadimisseade konfigureerida nii, et see vastaks pakendi rakukogusele ja keemiakomponendile. Vale konfigureerimine muudab pingeülemmäära või vooluprofiili, mis viib kiirendatud vananemiseni või kohe toimuvale katkemisele.
IV. Laadimise reguleerimise mehhanismid
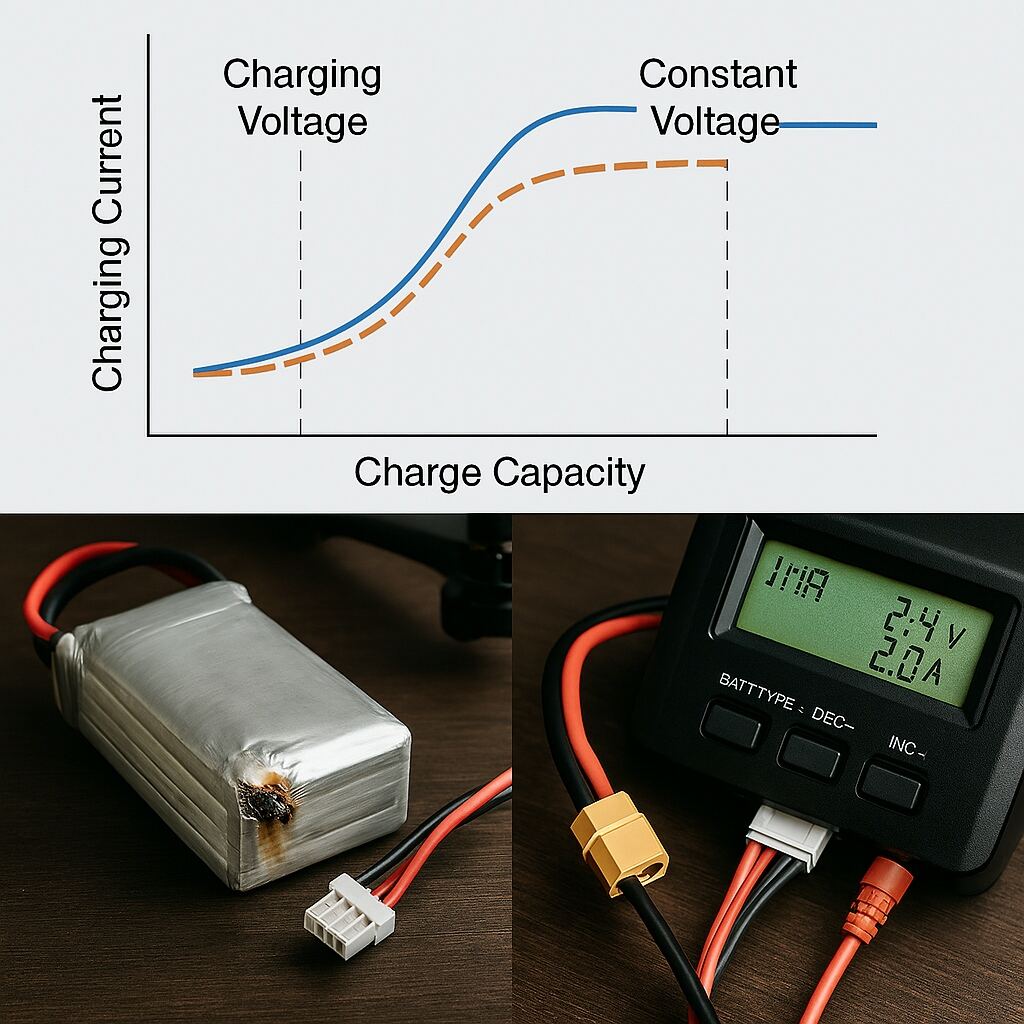
A. Kaheastmeline laadimiskontroll
Liitiumpõhiste akuude laadimiseks kasutatakse tavaliselt kaheastmelist reguleerimisskeemi. Esimeses etapis säilitatakse pidev vool, mis võimaldab rakus pinge tõusda selle sisemise takistuse järgi. Kui pinge saavutab ülemise läve, läheb laadimisseade üle pidevpingeläbikäigule, mille käigus vool väheneb järk-järgult. See lähenemisviis vähendab elektrood–elektrolüüt-liidesele avalduvat koormust.
B. Rakkudevaheline võrdlustus
Mitmeselliliste akupakkide puhul on vajalik võrdlusteostus, et takistada rakute pingete erinevust. Tasakaalustamata jäädes määrab nõrgem rakk kasutatava mahutavuse ja tugevaim rakk on oht kahjuliku ülepinge saamisele laadimisel. Võrdlusteostusahelad kulutavad ära või jaotavad ümber laadimislaengut, et säilitada paki üleüldist ühtlust.
C. Voolu valik ja degradatsiooniga seotud kaalutlused
Laadimisvool on tavaliselt väljendatud osana paki nimimahutavusest. Kõrgemad voolud lühendavad laadimisaega, kuid suurendavad soojuskoormust ja kiirendavad SEI-kihi kasvu. Madalamad voolud vähendavad degradatsiooni, kuid pikendavad pöörde aega, luues kompromissi operatsioonikiiruse ja aku eluea vahel.
V. Laadimisprotseduur ja keskkonnatingimused
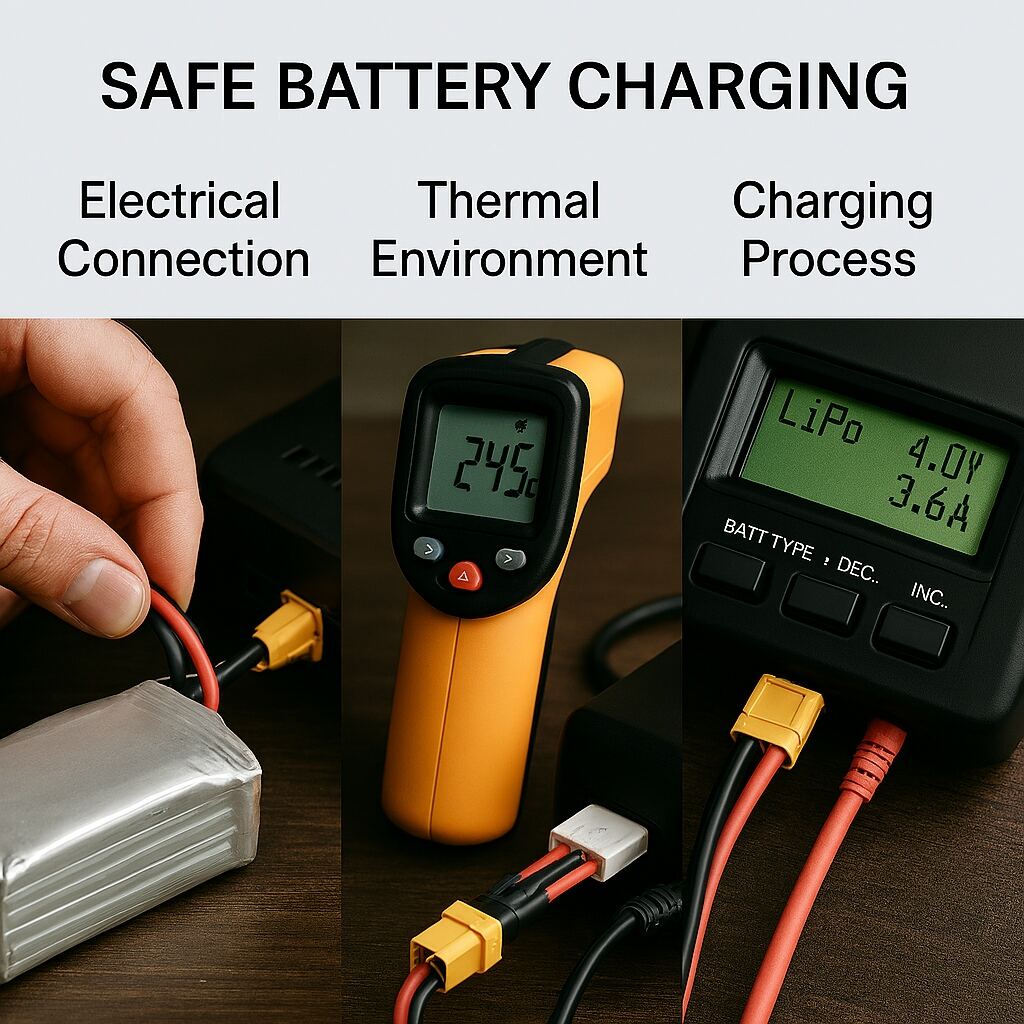
A. Elektriline liides ja ühendamise järjekord
Laadimiseks on vaja kindlalt ühendada nii peamised toitejuhtmed kui ka LiPo-pakkide puhul tasakaalustusühendus. Vigane järjekord või löövad ühendused tekitavad takistussoojenemist ja pingestabiilsust.
B. Füüsiline laadimiskeskkond
Laadimiskeskkond peab vähendama soojuse kogunemist ja kõrvaldama süttimisallikad. Tulekindlad pinnad ja piisav õhuvool on olulised. Akusid ei tohi paigutada kitsastes ruumides, kus soojus ei suuda laguneda.
C. Reaalajas parameetrite jälgimine
Laadimise ajal tuleb jälgida temperatuuri, pinge ühtlust ja voolu langust. Kõrvalekalded oodatavast käitumisest viitavad sisemistele anomaliiadele, näiteks kasvavale takistusele või kohalikule soojenemisele.
D. Pärast laadimist toimuv stabiilne olek
Pärast laadimist läbib aakumulaator lühikest rahulduvusperioodi, mille jooksul sisemised gradientid lagunevad. See stabiilsus parandab pinge täpsust ja vähendab soojuskoormust enne kasutuselevõttu või ladustamist.
VI. Turvapiirangud ja rikke teekonnad
A. Soojusliku ebastabiilsuse mehhanismid
Soojuslik läbikäigutõrge tekib siis, kui eksotermilised reaktsioonid ületavad akuraku võimekus soojuse lagunemiseks. Ülepinge, sisemised lühisühendid ja mehaaniline kahjustus võivad selliste reaktsioonide algatamiseks olla. Ennetavate meetmetena kasutatakse kontrollitud laadimiskeskkonda ja pidevat jälgimist.
B. Keskkonnatundlikkus
Niiskus, otsemine päikesekiirgus ja suletud ruumid muudavad akupanga soojuspiirtingimusi. Sellistes tingimustes laadimine suurendab ohu ületada turvalised töötingimused.
VII. Juhitud aku süsteemide laadimine
A. Sisseehitatud järelevalve funktsioonid
Targad akud sisaldavad mikrokontrollereid, mis reguleerivad laadimisparameetreid, jälgivad rakukogu seisundit ja tagavad ohutuspiiranguid. Need süsteemid vähendavad operaatori koormust, kuid nõuavad siiski keskkonna- ja soojustingimuste järgimist.
B. Tööprotsess
Laadimine toimub tavaliselt eraldi liidese või keskuse kaudu, mis suhtleb sisseehitatud juhturiga. Süsteem haldab ise tasakaalustamis- ja kaitsefunktsioone.
C. Tööpiirangud
Olenemata nende täiustatusest on nutikad akud siiski tundlikud temperatuuri äärmustele ja pikaajaliselt kõrgel laetuse tasemel hoitavale akule. Nende kaitsefunktsioonid ei suuda kompenseerida ebaõiget käsitsemist.
VIII. Töövigu ja nende inseneritehnoloogilised tagajärjed
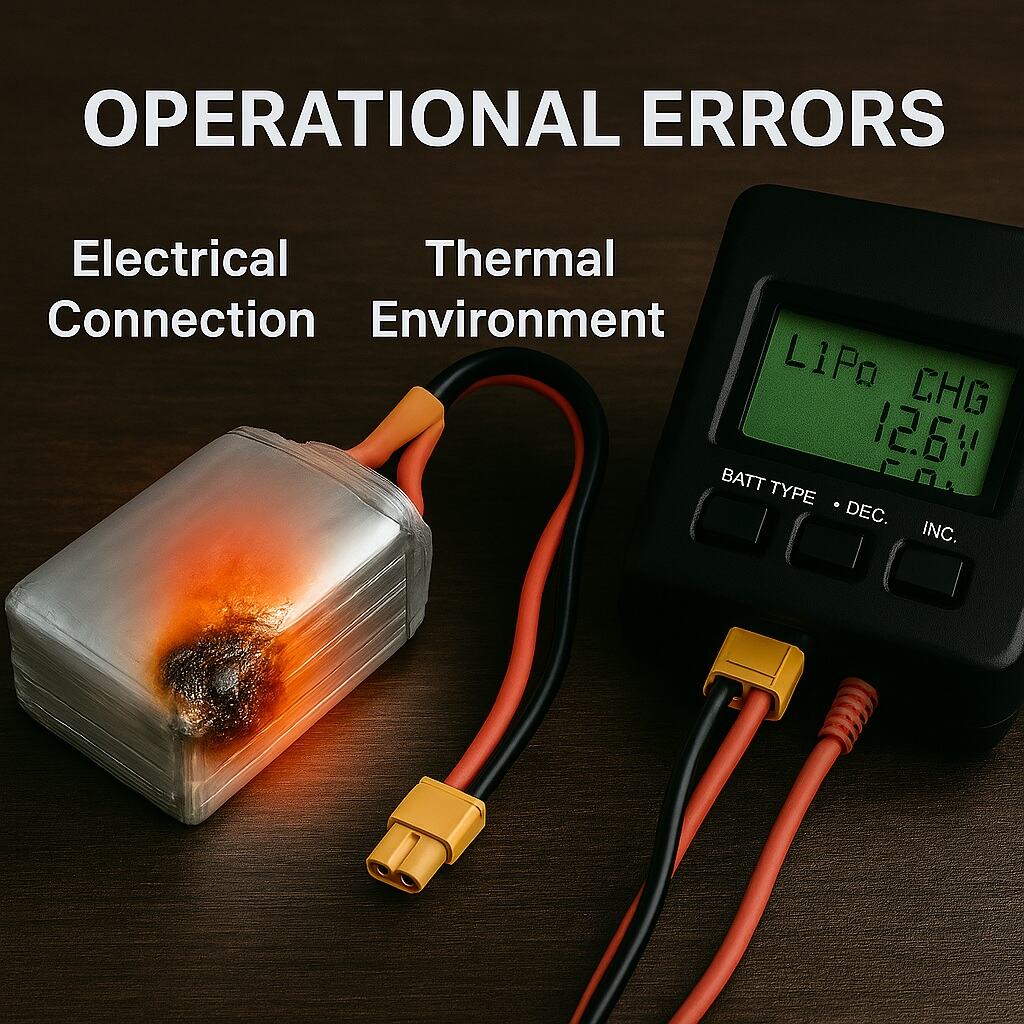
Tavalised töövigade näited on laadimise alustamine kohe pärast suurkoormuslikku laadimist, vigaste ühenduste kasutamine, liialdatud voolu rakendamine ning laadimine soojuslikult ebastabiilses keskkonnas. Sellised tavapraksised kiirendavad takistuse kasvu, vähendavad tsüklieluiga ja suurendavad katkestuste tõenäosust.
IX. Akude teenindusaja pikendamise strateegiad
A. Mõõdukad laadimiskiirused
Madalamad laadimisvoolud vähendavad soojuskoormust ja aeglustavad degradatsioonimehhanisme.
B. Kontrollitud salvestusolek
Akut hoitakse ladustamise ajal keskmises laadimisolekus, et vähendada keemilist vananemist.
C. Sõidukiparkide tasandil toimuv pöörlemine
Kasutuse jaotamine mitme akupaki vahel takistab ebavõrdset vananemist ja parandab kogu sõidukipargi usaldusväärsust.
D. Elektrilise liidese hooldus
Ühenduste perioodiline puhastamine vähendab takistuskaod ja parandab laadimise efektiivsust.
X. Laadimine mittestandardsetes tingimustes
A. Madalatel temperatuuridel toimimine
Madalatel temperatuuridel laadimiseks on vajalik eelsoojendus ja voolutugevuse vähendamine, et vältida litiumi plaatumist.
B. Kõrgematel temperatuuridel toimimine
Kuumas keskkonnas laadimiseks on vajalik aktiivne jahutus või ümberpaigutamine soojuslikult stabiilsetesse piirkondadesse.
C. Välitingimuste laadimispiirangud
Kanduvad võimsusallikad peavad tagama stabiilse pinge ja väikese moonutusega lainekujud, et vältida laadija rikeid.
XI. Missioonipõhine laadimishaldus
A. Tehniline planeerimine
Missioonikriitiliste UAV-de töö jaoks on vajalikud struktureeritud laadimisgraafikud, sealhulgas enne missiooni täielik laadimine, missioonide vaheline jahutamine ja pärast missiooni salvestusrežiimi reguleerimine.
B. Tervise jälgimine
Sisemise takistuse, temperatuuri ajaloo ja pingekõrvalekaldete jälgimine võimaldab ennustavat hooldust ja varajast tuvastamist valesti toimivatest akupakkidest.
XII. Kokkuvõte
UAV-de akude laadimine on mitme piiranguga inseneriprotsess, millele mõjutavad elektrokeemilised omadused, soojusdünaamika ja operatsioonilised nõuded. Tõhusad laadimisprotokollid parandavad ohutust, pikendavad kasutusiga ja suurendavad missioonide usaldusväärsust. Nende piirangute süsteemtase arusaam on oluline nii UAV-de energiahalduse valdkonna teadlastele kui ka praktilistele spetsialistidele.
