
Abstrakt
Energilagringsmoduler baserade på litiumkemi är grundläggande för driften av moderna obemannade luftfarkoster (UAV). Även om dessa batterier regelbundet laddas i fält- och laboratoriemiljöer styrs laddningsprocessen själv av en uppsättning elektrokemiska, termiska och operativa begränsningar som ofta underskattas. Avvikelser från lämpliga laddningsförhållanden accelererar strukturell försämring, minskar tillgänglig kapacitet och ökar sannolikheten för katastrofal fel. Denna studie undersöker på nytt laddning av UAV-batterier ur ett systemtekniskt perspektiv, med tonvikt på interaktionen mellan cellkemi, laddningsalgoritmer, miljögränser och krav på missionsnivå. Analysen sammanfattar ingenjörsprinciper i en enhetlig ram som är lämplig för forskare och operatörer inom UAV-området.
Indextermer— UAV:s energisystem, litiumbaserade batterier, laddningsreglering, termiska begränsningar, driftssäkerhet.
I. Introduktion
Återladdningsbara litiumbatterier har blivit den dominerande kraftkällan för små luftburna robotplattformar tack vare deras gynnsamma energi per massenhet och förmåga att hantera höga transienta laster. Trots sin utbredd användning är laddningen av dessa batterier fortfarande en icke-trivial ingenjörsuppgift. Laddningsprocessen begränsas av kinetiken för litiuminterkalering, stabiliteten hos den fasta elektrolytgränsytan (SEI) och den termiska beteenden hos cellstacken. Dessa begränsningar ställer strikta krav på spänning, ström och temperatur under laddning. När UAV:er övergår från rekreationella enheter till uppdragskritiska tillgångar blir behovet av rigoröst definierade laddningsförfaranden allt viktigare. Denna artikel analyserar laddningsprocessen ur ett flerskiktat ingenjörsperspektiv, där elektrokemiska grunden integreras med UAV:ers driftkrav.
II. Batteriarkitekturer i UAV-plattformar
A. Polymer-elektrolytpåsar
Polymer-elektrolytceller i påseform, vanligen kallade LiPo-batterier, använder laminerade elektrodstackar och en gelartad elektrolyt. Deras mekaniska flexibilitet möjliggör hög energitäthet, men ökar också benägenheten för deformationsinducerad felaktighet. Spänningsområdet är strikt begränsat av elektrolytens stabilitet, och att överskrida den övre gränsen utlöser irreversibla bieffekter.
B. Cylindriska och prismatiska litiumjonceller
Litiumjonceller med styva skal visar förbättrad strukturell robusthet och längre cykellivslängd. Deras elektrokemiska beteende styrs av interkalationsdynamiken inom lagerade eller spinelstrukturerade katoder. Även om deras urladdningsförmåga är lägre än hos LiPo-cellerna gör deras termiska stabilitet och förutsägbara åldrandesegenskaper dem lämpliga för UAV:er som kräver hållbarhet.
C. Batteripaket med inbyggd hanteringselektronik
Avancerade UAV-plattformar integrerar batterihanteringssystem (BMS) som övervakar cellspänningar, temperaturer och balanseringsoperationer. Dessa inbyggda system tillämpar driftgränser och tillhandahåller diagnostisk information, men eliminerar inte behovet av kontrollerade laddningsmiljöer.
III. Utvärdering före laddning
A. Bedömning av strukturell integritet

Innan laddning påbörjas måste batteriet utvärderas för mekaniska avvikelser. Deformation, gasansamling eller elektrolytrest indikerar en skadad intern struktur. Sådana förhållanden förändrar den interna impedansen och kan utlösa termisk instabilitet under laddning.
B. Verifiering av termiskt tillfälle
Cellstackens temperatur påverkar kraftigt laddningsupptagandet. Laddning vid låg temperatur bromsar litiumdiffusionen och främjar avsättning av metalliskt litium, medan höga temperaturer accelererar parasitiska reaktioner. Ett termiskt jämviktstillfälle krävs därför innan laddning påbörjas.
C. Konsistens i laddarens konfiguration
För batteripack utan inbyggd hanteringselektronik måste laddaren konfigureras så att den matchar packets antal celler och dess kemiska sammansättning. Felaktig konfiguration ändrar spänningsgränsen eller strömmens profil, vilket leder till accelererad förslitning eller omedelbar felaktighet.
IV. Mekanismer för laddningsreglering
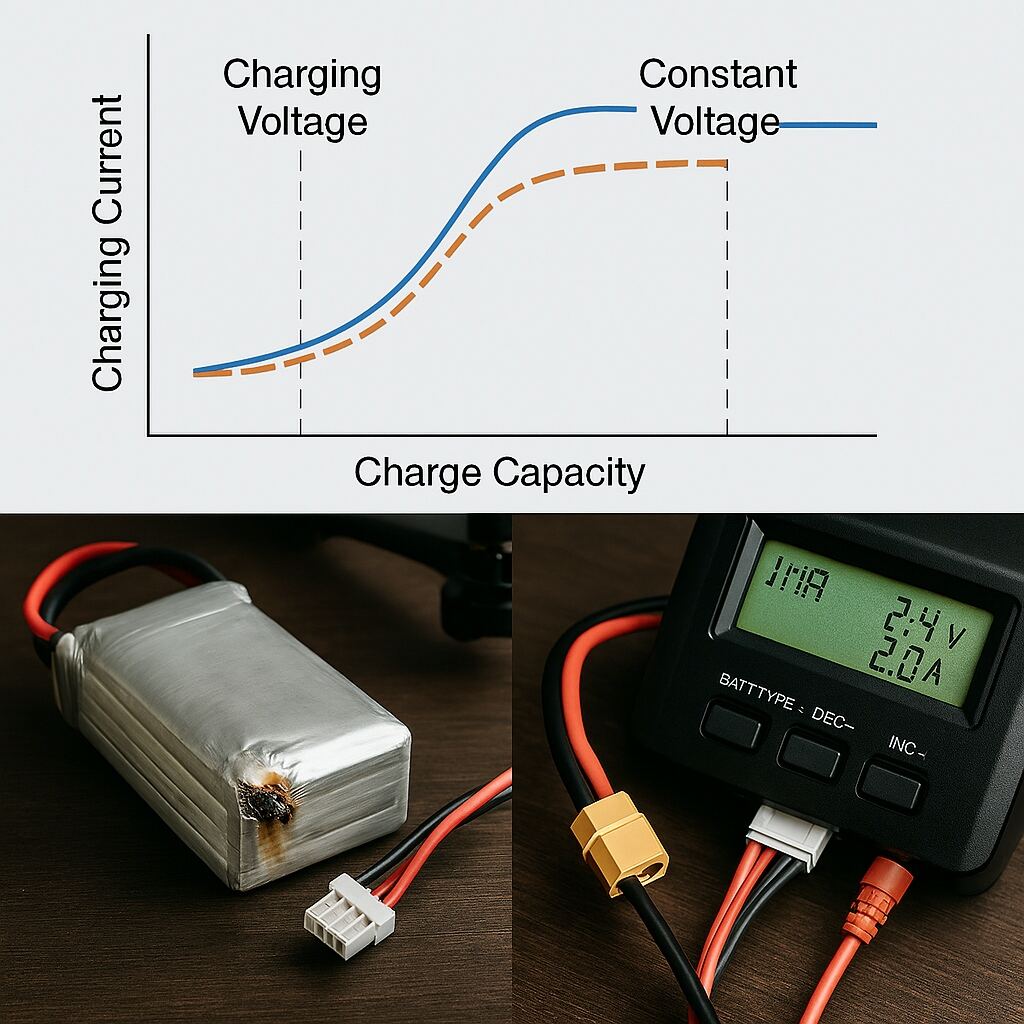
A. Tvåstegsladdningskontroll
Litiumbaserade batterier laddas vanligtvis med hjälp av en tvåstegsregleringsmetod. Det första steget innebär konstant ström, vilket gör att cellspänningen stiger i enlighet med dess interna impedans. När spänningen når den övre gränsen växlar laddaren till ett konstant-spänningssteg, under vilket strömmen gradvis minskar. Denna metod minimerar påverkan på elektrod–elektrolyt-gränsytan.
B. Jämnviktsreglering mellan celler
Flercellsbatteripaket kräver balansering för att förhindra avvikelse i cellspänningarna. Utan balansering bestämmer den svagaste cellen den användbara kapaciteten, och den starkaste cellen riskerar överspänning vid laddning. Balanseringskretsar dissiperar eller omfördelar laddning för att upprätthålla enhetlighet över hela batteripaketet.
C. Strömval och överväganden kring nedbrytning
Laddströmmen uttrycks vanligtvis som en bråkdel av batteripaketets nominella kapacitet. Högre strömmar minskar laddningstiden men ökar den termiska belastningen och accelererar bildningen av SEI-lager. Lägre strömmar minskar nedbrytningen men förlänger återställningstiden, vilket skapar en avvägning mellan driftens tempo och batteriets livslängd.
V. Laddningsprocedur och miljökrav
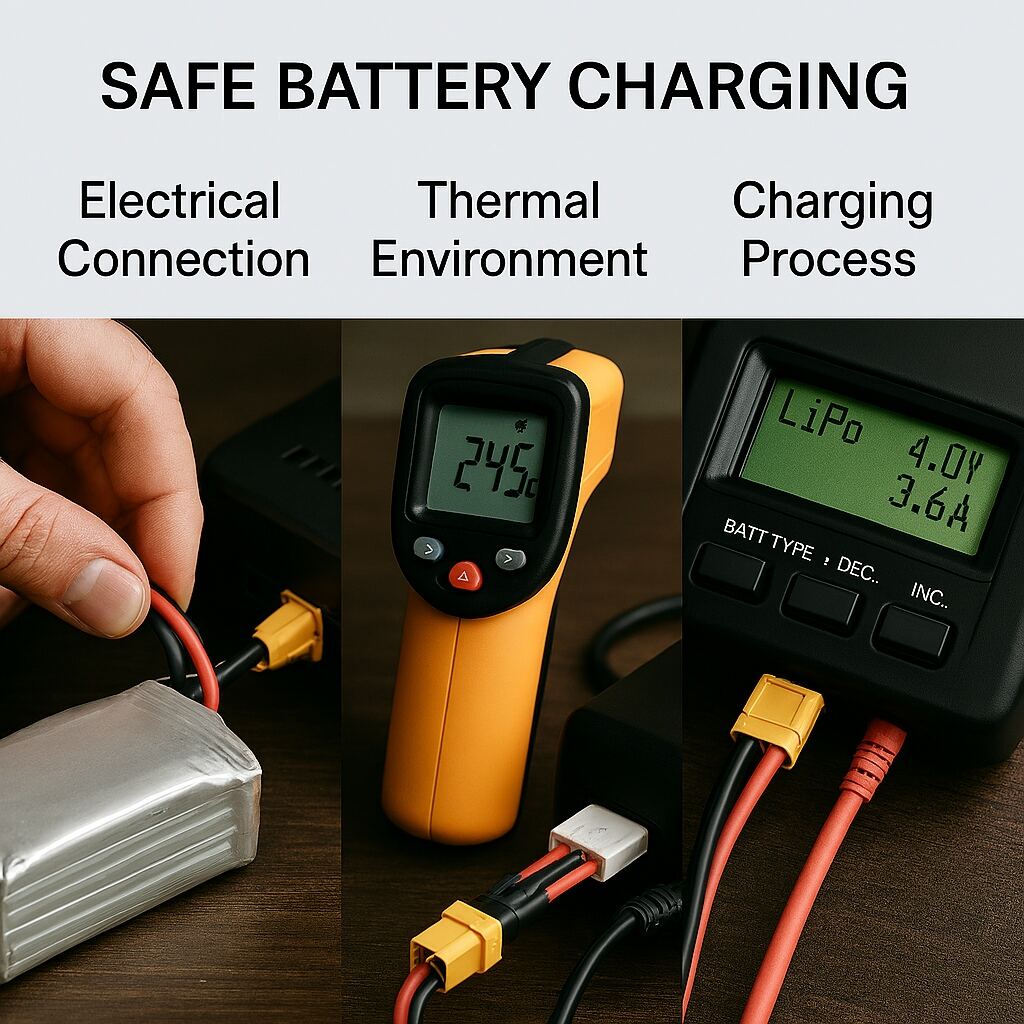
A. Elektrisk gränssnitt och anslutningsordning
Laddning kräver säker anslutning av både de huvudsakliga kraftledningarna och, för LiPo-paket, balanseringsanslutningen. Felaktig sekvensering eller lösa anslutningar orsakar resistiv uppvärmning och spänningsinstabilitet.
B. Fysisk laddningsmiljö
Laddningsmiljön måste minimera värmeackumulering och eliminera tändkällor. Obrännbara ytor och tillräcklig luftcirkulation är avgörande. Batterier får inte placeras i begränsade utrymmen där värme inte kan avledas.
C. Övervakning av parametrar i realtid
Under laddning måste temperatur, spänningsjämnhet och strömförsvagning övervakas. Avvikelser från förväntat beteende indikerar interna anomalier, såsom ökad impedans eller lokal uppvärmning.
D. Stabilisering efter laddning
Efter laddning genomgår batteriet en kort avslappningsperiod under vilken interna gradienter avtar. Denna stabilisering förbättrar spänningsnoggrannheten och minskar termisk belastning innan batteriet tas i drift eller lagras.
VI. Säkerhetsbegränsningar och felvägar
A. Mekanismer för termisk instabilitet
Termisk genomgång uppstår när exoterma reaktioner överskrider cellens förmåga att avleda värme. Överspänning, interna kortslutningar och mekanisk skada kan initiera sådana reaktioner. Förebyggande åtgärder inkluderar kontrollerade laddningsmiljöer och kontinuerlig övervakning.
B. Känslighet för miljöförhållanden
Fuktighet, direkt solstrålning och slutna utrymmen förändrar batteriets termiska gränsvillkor. Att ladda under sådana förhållanden ökar sannolikheten för att överskrida säkra driftgränser.
VII. Laddning av hanterade batterisystem
A. Inbyggda övervakningsfunktioner
Smartbatterier innehåller mikrokontrollenheter som reglerar laddningsparametrar, övervakar cellhälsan och tillämpar säkerhetsgränser. Dessa system minskar operatörens arbetsbelastning men kräver fortfarande efterlevnad av miljö- och temperaturbegränsningar.
B. Driftarbetsflöde
Laddning sker vanligtvis via ett dedikerat gränssnitt eller en hub som kommunicerar med den inbyggda styrenheten. Systemet hanterar autonomt balanserings- och skyddsfunktioner.
C. Driftbegränsningar
Trots sin avancerade konstruktion är smarta batterier fortfarande känslomärka för extrema temperaturer och långvarig lagring i hög laddningsnivå. Deras skyddsfunktioner kan inte kompensera för felaktig hantering.
VIII. Driftfel och deras ingenjörsmässiga konsekvenser
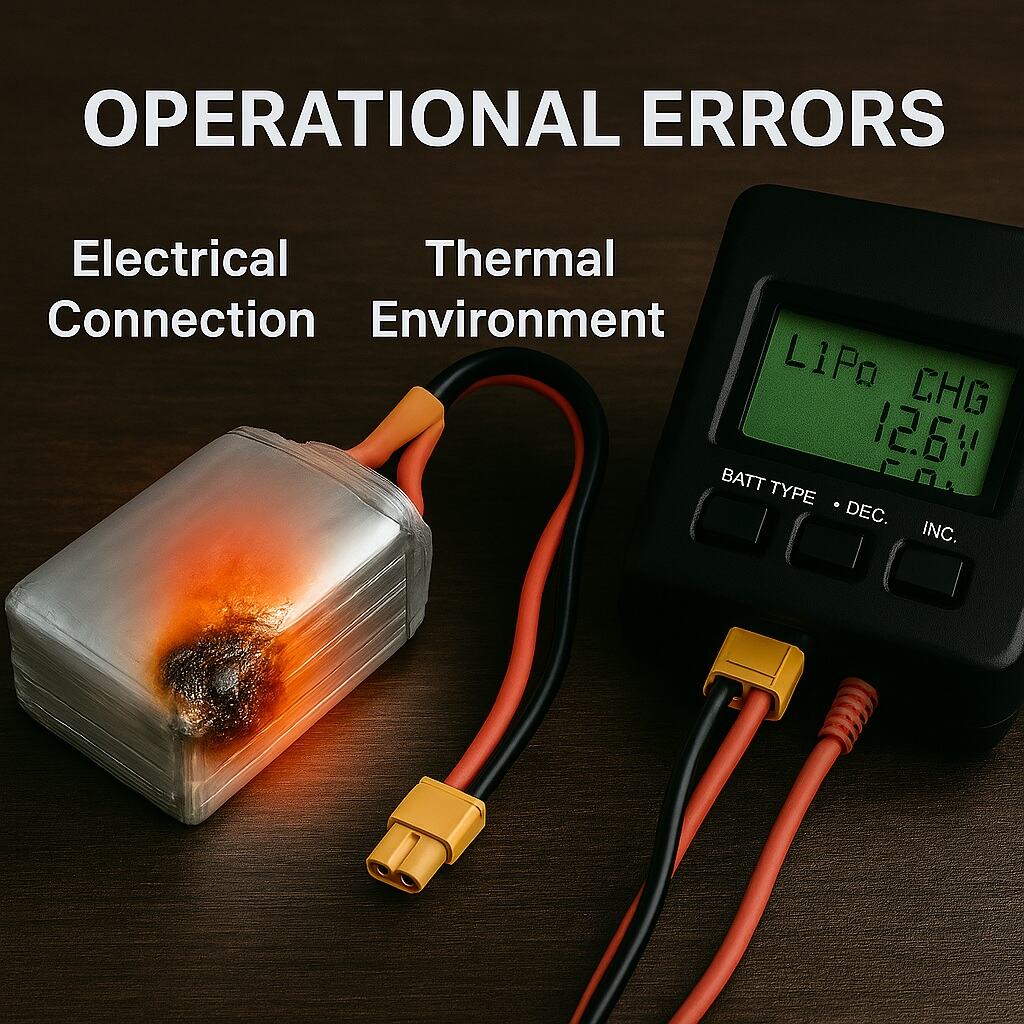
Vanliga driftfel inkluderar att påbörja laddning omedelbart efter urladdning under hög belastning, användning av skadade kontakter, tillämpning av för hög ström och laddning i termiskt instabila miljöer. Dessa metoder accelererar impedansökningen, minskar cykeltiden och ökar sannolikheten för fel.
IX. Strategier för att förlänga batteriets livslängd
A. Måttfulla laddhastigheter
Lägre laddströmmar minskar termisk belastning och bromsar ned degraderingsmekanismer.
B. Reglerad lagringsnivå
Att hålla batteriet i ett mellanläge av laddning under lagring minimerar kemisk åldring.
C. Rotation på flottans nivå
Att fördela användningen över flera batteripaket förhindrar ojämn åldring och förbättrar den totala flottans tillförlitlighet.
D. Underhåll av elektriskt gränssnitt
Regelbunden rengöring av kontakter minskar resistiva förluster och förbättrar laddningseffektiviteten.
X. Laddning under icke-standardiserade förhållanden
A. Drift vid låg temperatur
Laddning vid låga temperaturer kräver förvärmning och minskad ström för att undvika litiumplätering.
B. Drift vid hög temperatur
Laddning i varma miljöer kräver aktiv kylning eller omlokalisering till termiskt stabila områden.
C. Fältladdningsbegränsningar
Bärbara kraftkällor måste tillhandahålla stabil spänning och vågformer med låg förvrängning för att undvika laddarens felaktiga funktion.
XI. Uppdragsinriktad laddningshantering
A. Driftplanering
Uppdragskritiska UAV-drifter kräver strukturerade laddningsplaner, inklusive fullständig laddning före uppdraget, kyling mellan uppdragen och konditionering av lagring efter uppdraget.
B. Hälsövervakning
Att spåra inre resistans, temperaturhistorik och spänningsavvikelse möjliggör förutsägande underhåll och tidig upptäckt av batteripack som går sönder.
XII. slutsats
Laddning av UAV-batterier är en teknisk process med flera begränsningar, som formas av elektrokemiskt beteende, termodynamik och driftkrav. Effektiva laddningsprotokoll förbättrar säkerheten, förlänger servicelivet och ökar pålitligheten för uppdragen. En systemnivåförståelse av dessa begränsningar är avgörande både för forskare och praktiker inom energihantering för UAV:er.
