
ภาพย่อ
โมดูลการจัดเก็บพลังงานที่ใช้เทคโนโลยีลิเธียมเป็นพื้นฐานสำคัญต่อการปฏิบัติงานของยานอากาศไร้คนขับสมัยใหม่ (UAV) แม้ว่าแบตเตอรี่เหล่านี้จะได้รับการชาร์จเป็นประจำทั้งในสนามและในห้องปฏิบัติการ แต่กระบวนการชาร์จนั้นเองก็ถูกควบคุมโดยข้อจำกัดด้านอิเล็กโทรเคมี ความร้อน และการปฏิบัติงาน ซึ่งมักถูกประเมินต่ำกว่าความเป็นจริง การเบี่ยงเบนจากสภาวะการชาร์จที่เหมาะสมจะเร่งการเสื่อมสภาพของโครงสร้าง ลดความจุที่ใช้งานได้จริง และเพิ่มความเสี่ยงต่อความล้มเหลวอย่างรุนแรง งานวิจัยนี้ได้ทบทวนกระบวนการชาร์จแบตเตอรี่สำหรับ UAV ใหม่จากมุมมองวิศวกรรมระบบ โดยเน้นปฏิสัมพันธ์ระหว่างองค์ประกอบทางเคมีของเซลล์ อัลกอริทึมการชาร์จ ขอบเขตสิ่งแวดล้อม และข้อกำหนดระดับภารกิจ การวิเคราะห์นี้รวมหลักการวิศวกรรมเข้าด้วยกันเป็นกรอบแนวคิดแบบบูรณาการที่เหมาะสมสำหรับนักวิจัยและผู้ปฏิบัติงานด้าน UAV
คำสำคัญ— ระบบพลังงาน UAV, แบตเตอรี่ที่ใช้ลิเธียม, การควบคุมการชาร์จ, ข้อจำกัดด้านอุณหภูมิ, ความปลอดภัยในการปฏิบัติงาน
ข้อที่ 1. บทนำ
แบตเตอรี่ลิเธียมแบบชาร์จซ้ำได้มีบทบาทเป็นแหล่งพลังงานหลักสำหรับแพลตฟอร์มหุ่นยนต์บินขนาดเล็ก เนื่องจากมีอัตราส่วนพลังงานต่อมวลที่เหมาะสมและสามารถรองรับภาระไฟฟ้าชั่วคราวระดับสูงได้ แม้จะแพร่หลายอย่างกว้างขวาง แต่กระบวนการชาร์จแบตเตอรี่เหล่านี้ยังคงเป็นงานวิศวกรรมที่ไม่ใช่เรื่องง่าย กระบวนการชาร์จถูกจำกัดด้วยกลไกการแทรกตัวของลิเธียม (lithium intercalation kinetics) ความเสถียรของชั้นขอบเขตของแข็ง–อิเล็กโทรไลต์ (solid–electrolyte interface: SEI) และพฤติกรรมทางความร้อนของชุดเซลล์ (cell stack) ข้อจำกัดเหล่านี้กำหนดขีดจำกัดที่เข้มงวดสำหรับแรงดันไฟฟ้า กระแสไฟฟ้า และอุณหภูมิในระหว่างการชาร์จ ขณะที่โดรน (UAV) ค่อยๆ เปลี่ยนผ่านจากอุปกรณ์เพื่อการพักผ่อนหย่อนใจไปสู่ทรัพย์สินที่มีความสำคัญต่อภารกิจอย่างยิ่ง ความจำเป็นในการกำหนดขั้นตอนการชาร์จอย่างเคร่งครัดจึงมีความสำคัญเพิ่มมากขึ้นเรื่อยๆ บทความนี้วิเคราะห์กระบวนการชาร์จจากมุมมองวิศวกรรมแบบหลายชั้น โดยผสานหลักการอิเล็กโทรเคมีพื้นฐานเข้ากับข้อกำหนดในการปฏิบัติงานของโดรน
II. สถาปัตยกรรมแบตเตอรี่ในแพลตฟอร์มโดรน
A. เซลล์แบบกระเป๋าที่ใช้โพลิเมอร์อิเล็กโทรไลต์
เซลล์แบบถุง (pouch cells) ที่ใช้โพลิเมอร์เป็นอิเล็กโทรไลต์ ซึ่งมักเรียกกันโดยทั่วไปว่าแบตเตอรี่ LiPo ใช้ชั้นขั้วไฟฟ้าแบบลามิเนตและอิเล็กโทรไลต์แบบเจล ความยืดหยุ่นเชิงกลของเซลล์ประเภทนี้ทำให้สามารถบรรจุพลังงานได้สูง แต่ก็เพิ่มความเสี่ยงต่อการล้มเหลวอันเนื่องมาจากการบิดเบือนหรือเปลี่ยนรูปด้วยเช่นกัน ช่วงแรงดันไฟฟ้าถูกจำกัดอย่างเข้มงวดโดยความเสถียรของอิเล็กโทรไลต์ และหากแรงดันเกินค่าขีดบน จะก่อให้เกิดปฏิกิริยาข้างเคียงที่ไม่สามารถย้อนกลับได้
ข. เซลล์ลิเธียม-ไอออนแบบทรงกระบอกและแบบปริซึม
เซลล์ลิเธียม-ไอออนที่มีโครงสร้างหุ้มภายนอกที่แข็งแรง มีความทนทานเชิงโครงสร้างดีกว่าและมีอายุการใช้งานแบบไซเคิลยาวนานกว่า ลักษณะพฤติกรรมทางอิเล็กโทรเคมีของเซลล์ประเภทนี้ขึ้นอยู่กับกลไกการแทรกตัว (intercalation dynamics) ภายในโครงสร้างแคโทดแบบชั้น (layered) หรือแบบสปินเนิล (spinel) แม้ว่าความสามารถในการปล่อยประจุจะต่ำกว่าเซลล์ LiPo แต่ความเสถียรทางความร้อนและลักษณะการเสื่อมสภาพที่คาดการณ์ได้ ทำให้เซลล์ประเภทนี้เหมาะสมสำหรับโดรน (UAV) ที่ออกแบบมาเพื่อการใช้งานระยะยาว
ค. ชุดแบตเตอรี่ที่มีระบบจัดการอิเล็กทรอนิกส์ฝังอยู่ภายใน
แพลตฟอร์มโดรนขั้นสูง (UAV) แบบบูรณาการระบบจัดการแบตเตอรี่ (BMS) ซึ่งทำหน้าที่ตรวจสอบแรงดันไฟฟ้าของแต่ละเซลล์ อุณหภูมิ และการปรับสมดุลของเซลล์ ระบบที่ฝังอยู่เหล่านี้บังคับใช้ขอบเขตการปฏิบัติงานและให้ข้อมูลสำหรับการวินิจฉัย แต่ไม่สามารถกำจัดความจำเป็นในการชาร์จในสภาพแวดล้อมที่ควบคุมได้
III. การประเมินก่อนการชาร์จ
A. การประเมินความสมบูรณ์ของโครงสร้าง

ก่อนเริ่มการชาร์จ จำเป็นต้องประเมินแบตเตอรี่เพื่อหาความผิดปกติเชิงกล ซึ่งรวมถึงการบิดเบี้ยว การสะสมของก๊าซ หรือคราบสารอิเล็กโทรไลต์ ซึ่งเป็นสัญญาณบ่งชี้ว่าโครงสร้างภายในเสียหาย สภาพดังกล่าวจะเปลี่ยนค่าอิมพีแดนซ์ภายใน และอาจก่อให้เกิดความไม่เสถียรทางความร้อนระหว่างการชาร์จ
B. การตรวจสอบสถานะอุณหภูมิ
อุณหภูมิของชุดเซลล์มีอิทธิพลอย่างมากต่อความสามารถในการรับการชาร์จ การชาร์จที่อุณหภูมิต่ำจะชะลอการแพร่กระจายของลิเธียม และส่งเสริมการตกตะกอนของลิเธียมในรูปโลหะ ขณะที่การชาร์จที่อุณหภูมิสูงจะเร่งปฏิกิริยาข้างเคียงที่ไม่พึงประสงค์ ดังนั้นจึงจำเป็นต้องให้ชุดเซลล์อยู่ในภาวะสมดุลทางความร้อนก่อนการชาร์จ
C. ความสอดคล้องของการตั้งค่าเครื่องชาร์จ
สำหรับชุดแบตเตอรี่ที่ไม่มีอุปกรณ์จัดการในตัว ตัวชาร์จจะต้องตั้งค่าให้สอดคล้องกับจำนวนเซลล์และชนิดของสารเคมีภายในชุดแบตเตอรี่นั้น การตั้งค่าที่ไม่ถูกต้องจะทำให้เพดานแรงดันไฟฟ้าหรือรูปแบบกระแสไฟฟ้าเปลี่ยนแปลง ส่งผลให้แบตเตอรี่เสื่อมสภาพเร็วขึ้น หรือล้มเหลวทันที
IV. กลไกการควบคุมการชาร์จ
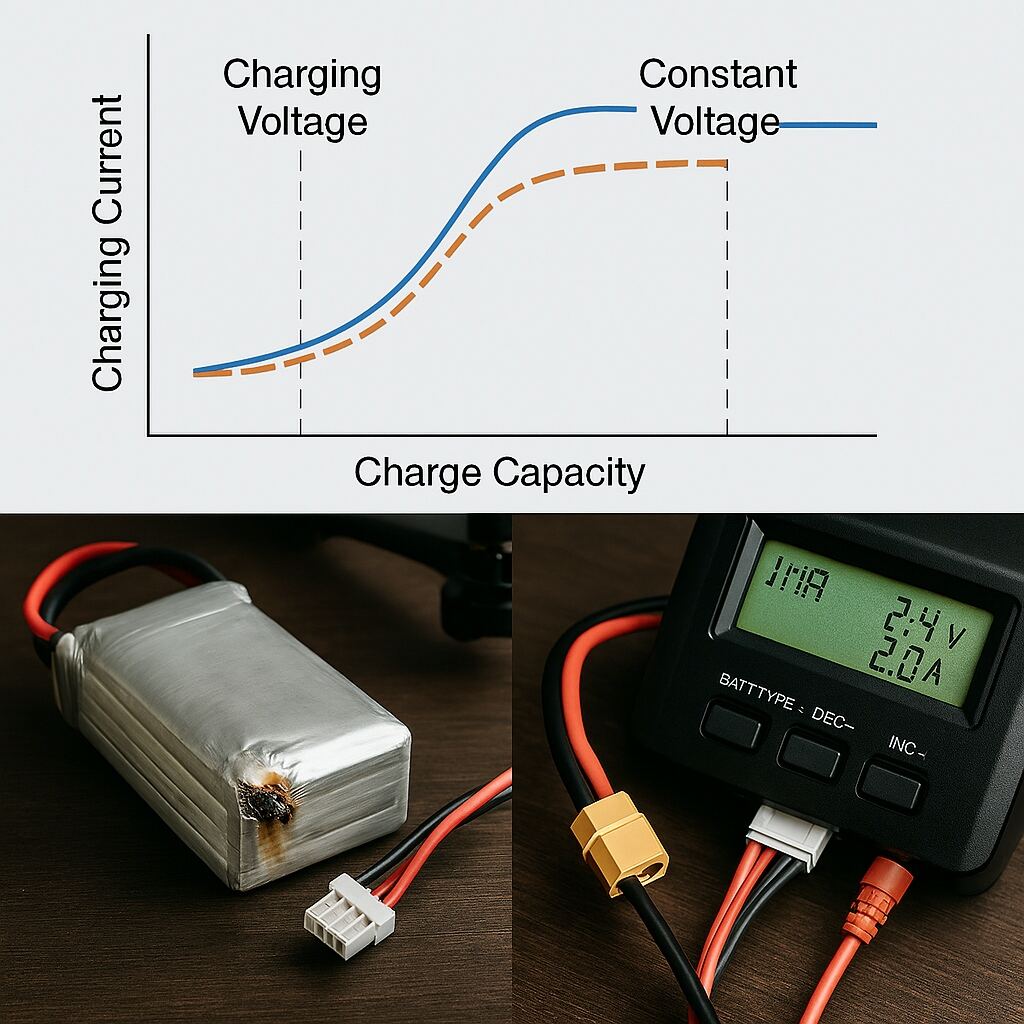
A. การควบคุมการชาร์จแบบสองขั้นตอน
แบตเตอรี่ที่ใช้เทคโนโลยีลิเธียมมักถูกชาร์จด้วยระบบการควบคุมแบบสองขั้นตอน ขั้นตอนแรกเป็นการรักษาระดับกระแสไฟฟ้าคงที่ ซึ่งทำให้แรงดันไฟฟ้าของเซลล์เพิ่มขึ้นตามความต้านทานภายในของเซลล์ เมื่อแรงดันไฟฟ้าถึงเกณฑ์สูงสุด ตัวชาร์จจะเปลี่ยนไปสู่ขั้นตอนที่สอง คือการรักษาแรงดันไฟฟ้าคงที่ ซึ่งในระหว่างนี้กระแสไฟฟ้าจะลดลงอย่างค่อยเป็นค่อยไป วิธีการนี้ช่วยลดความเครียดที่เกิดขึ้นต่อพรมแดนระหว่างขั้วไฟฟ้ากับอิเล็กโทรไลต์
B. การปรับสมดุลระหว่างเซลล์
ชุดแบตเตอรี่แบบหลายเซลล์จำเป็นต้องมีการปรับสมดุล (equalization) เพื่อป้องกันไม่ให้แรงดันไฟฟ้าของแต่ละเซลล์เบี่ยงเบนจากกัน หากรวมเซลล์เข้าด้วยกันโดยไม่มีการปรับสมดุล เซลล์ที่อ่อนแอที่สุดจะกำหนดความจุที่ใช้งานได้ทั้งหมด ในขณะที่เซลล์ที่แข็งแกร่งที่สุดอาจเสี่ยงต่อภาวะแรงดันเกิน (over-voltage) ระหว่างการชาร์จ วงจรปรับสมดุลจะทำหน้าที่สลายหรือกระจายประจุใหม่เพื่อรักษาความสม่ำเสมอของแรงดันทั่วทั้งชุดแบตเตอรี่
ค. การเลือกกระแสและพิจารณาเรื่องการเสื่อมสภาพ
กระแสการชาร์จมักแสดงเป็นเศษส่วนของความจุที่ระบุไว้ของชุดแบตเตอรี่ กระแสที่สูงขึ้นจะลดระยะเวลาการชาร์จ แต่เพิ่มภาระความร้อนและเร่งการเกิดชั้น SEI ขณะที่กระแสที่ต่ำลงจะลดอัตราการเสื่อมสภาพ แต่ยืดระยะเวลาในการกลับมาใช้งานใหม่ จึงเกิดการแลกเปลี่ยนระหว่างความเร็วในการปฏิบัติงานกับอายุการใช้งานของแบตเตอรี่
ข้อ 5: ขั้นตอนการชาร์จและข้อกำหนดด้านสิ่งแวดล้อม
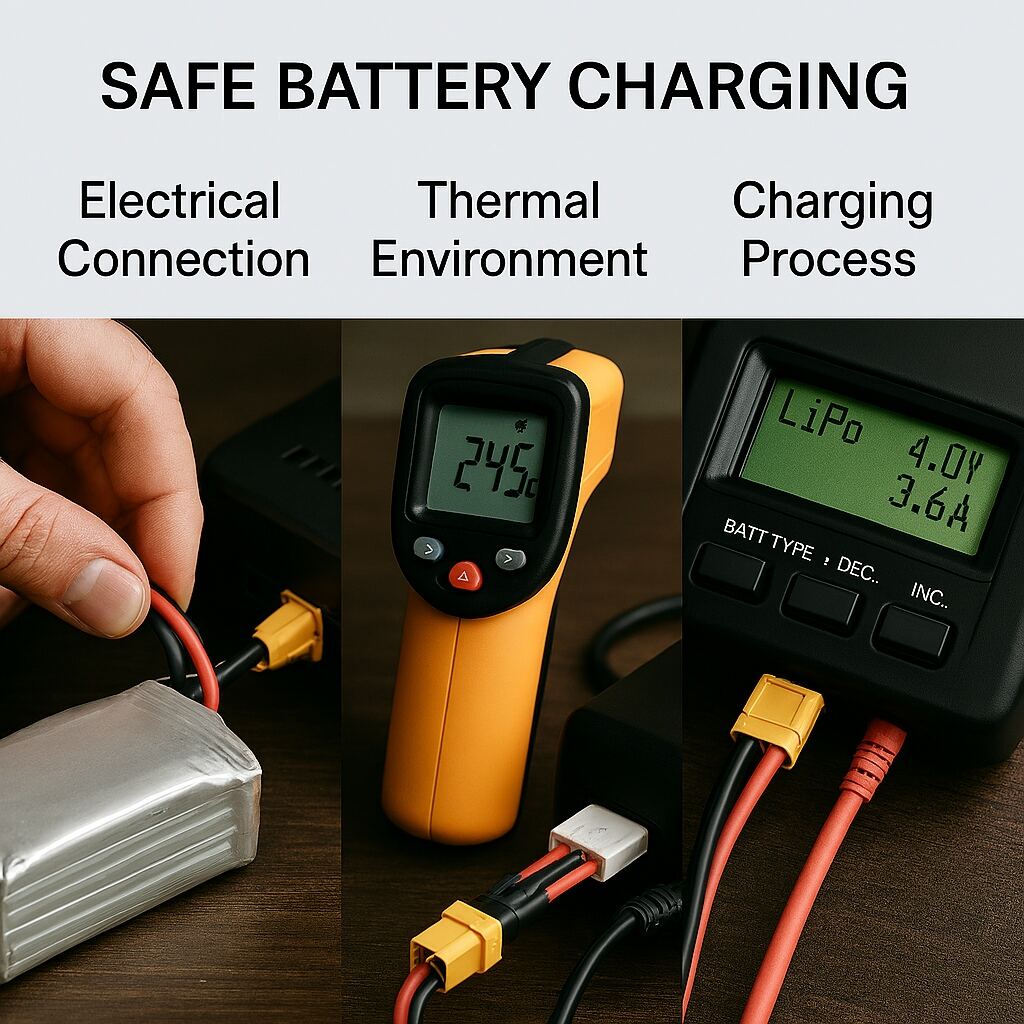
ก. อินเทอร์เฟซทางไฟฟ้าและลำดับการเชื่อมต่อ
การชาร์จต้องมีการเชื่อมต่ออย่างมั่นคงทั้งสายนำไฟหลักและตัวเชื่อมต่อปรับสมดุล (balancing connector) สำหรับชุดแบตเตอรี่ LiPo การเชื่อมต่อที่ไม่ถูกต้องตามลำดับหรือการยึดแน่นไม่เพียงพอจะก่อให้เกิดความร้อนจากความต้านทานและทำให้แรงดันไม่เสถียร
ข. สภาพแวดล้อมทางกายภาพสำหรับการชาร์จ
สภาพแวดล้อมในการชาร์จต้องลดการสะสมความร้อนให้น้อยที่สุด และกำจัดแหล่งที่อาจก่อให้เกิดการลุกไหม้ให้หมดสิ้น ผิววัสดุที่ไม่ติดไฟและระบบระบายอากาศที่เพียงพอเป็นสิ่งจำเป็นอย่างยิ่ง ห้ามวางแบตเตอรี่ในพื้นที่จำกัดซึ่งความร้อนไม่สามารถกระจายออกไปได้
ค. การตรวจสอบพารามิเตอร์แบบเรียลไทม์
ระหว่างการชาร์จ ต้องตรวจสอบอุณหภูมิ ความสม่ำเสมอของแรงดันไฟฟ้า และการลดลงของกระแสไฟฟ้า ความเบี่ยงเบนจากพฤติกรรมที่คาดไว้บ่งชี้ถึงความผิดปกติภายใน เช่น ความต้านทานที่เพิ่มขึ้นหรือการเกิดความร้อนเฉพาะจุด
ง. การทำให้สถานะคงที่หลังการชาร์จ
หลังการชาร์จ แบตเตอรี่จะผ่านช่วงเวลาพักสั้นๆ เพื่อให้เกรเดียนต์ภายในกระจายตัวอย่างสม่ำเสมอ กระบวนการนี้ช่วยปรับปรุงความแม่นยำของแรงดันไฟฟ้า และลดความเครียดจากความร้อนก่อนนำไปใช้งานจริงหรือเก็บไว้
VI. ข้อจำกัดด้านความปลอดภัยและเส้นทางการล้มเหลว
ก. กลไกความไม่เสถียรของอุณหภูมิ
การล้มเหลวแบบร้อนเกิน (thermal runaway) เกิดขึ้นเมื่อปฏิกิริยาที่ปลดปล่อยความร้อนเกินความสามารถของเซลล์ในการกระจายความร้อนออก แรงดันไฟฟ้าเกินค่าที่กำหนด วงจรลัดภายใน และความเสียหายเชิงกล สามารถเป็นต้นเหตุที่กระตุ้นให้เกิดปฏิกิริยาดังกล่าวได้ มาตรการป้องกันรวมถึงการควบคุมสภาวะแวดล้อมขณะชาร์จและการตรวจสอบอย่างต่อเนื่อง
ข้อ B. ความไวต่อสภาพแวดล้อม
ความชื้น รังสีแสงอาทิตย์โดยตรง และพื้นที่ปิดล้อมจะเปลี่ยนแปลงเงื่อนไขขอบเขตทางความร้อนของแบตเตอรี่ การชาร์จในสภาวะดังกล่าวจะเพิ่มความน่าจะเป็นที่จะเกินขีดจำกัดการใช้งานอย่างปลอดภัย
บทที่ VII. การชาร์จระบบแบตเตอรี่ที่มีการจัดการ
ข้อ A. ฟังก์ชันการควบคุมแบบฝังตัว
แบตเตอรี่อัจฉริยะมีไมโครคอนโทรลเลอร์ฝังตัวซึ่งทำหน้าที่ควบคุมพารามิเตอร์การชาร์จ ตรวจสอบสุขภาพของเซลล์ และบังคับใช้ขีดจำกัดด้านความปลอดภัย ระบบที่มีฟังก์ชันดังกล่าวช่วยลดภาระของผู้ปฏิบัติงาน แต่ยังคงต้องปฏิบัติตามข้อจำกัดด้านสิ่งแวดล้อมและอุณหภูมิอย่างเคร่งครัด
ข้อ B. ลำดับขั้นตอนการปฏิบัติงาน
การชาร์จมักเกิดขึ้นผ่านอินเทอร์เฟซหรือฮับเฉพาะที่สื่อสารกับคอนโทรลเลอร์แบบฝังตัว ระบบจะจัดการฟังก์ชันการปรับสมดุลและการป้องกันโดยอัตโนมัติ
C. ข้อจำกัดในการปฏิบัติงาน
แม้แบตเตอรี่อัจฉริยะจะมีความซับซ้อนเพียงใด ก็ยังคงไวต่ออุณหภูมิสุดขั้วและต่อการเก็บรักษาในสถานะประจุสูงเป็นเวลานาน ฟังก์ชันการป้องกันของแบตเตอรี่ไม่สามารถชดเชยการจัดการที่ไม่เหมาะสมได้
VIII. ข้อผิดพลาดในการปฏิบัติงานและผลกระทบทางวิศวกรรมที่เกี่ยวข้อง
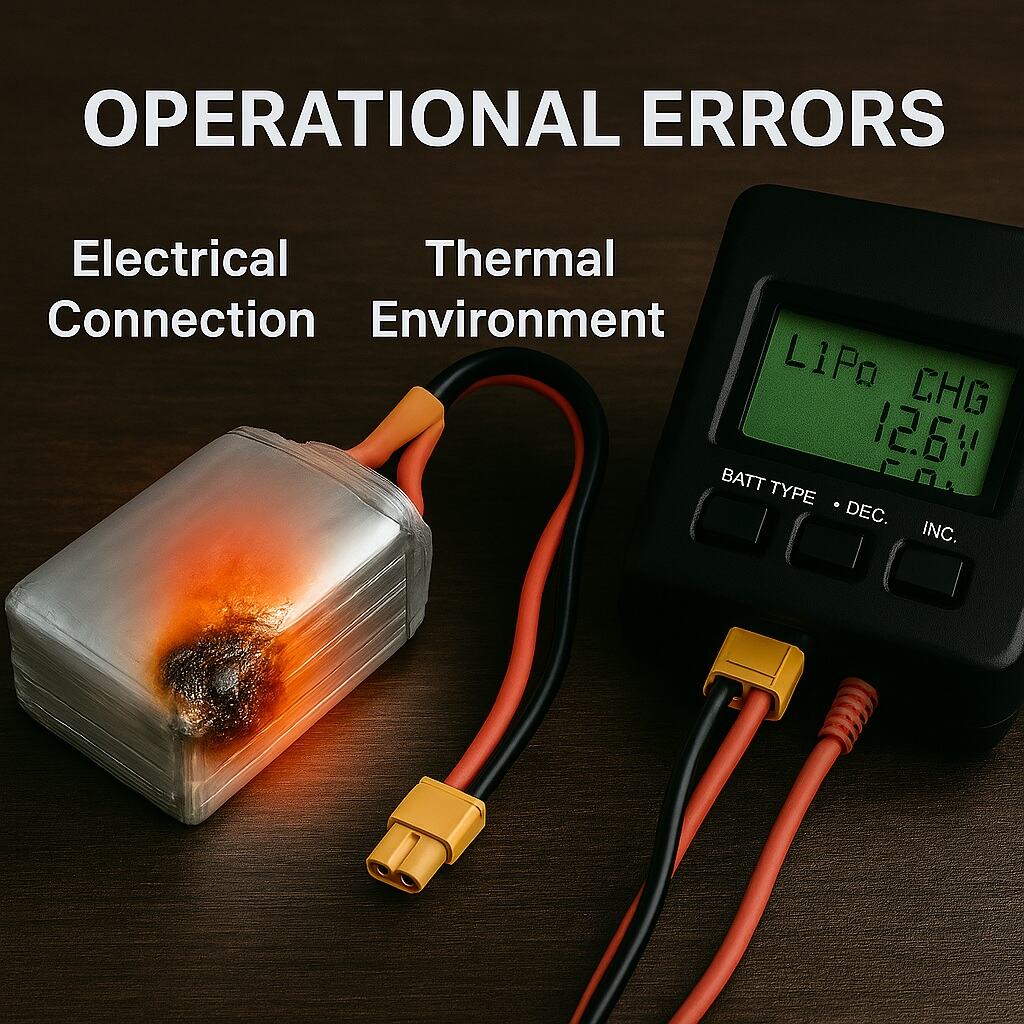
ข้อผิดพลาดในการปฏิบัติงานทั่วไป ได้แก่ การเริ่มชาร์จทันทีหลังจากปล่อยกระแสไฟฟ้าภายใต้โหลดสูง การใช้ขั้วต่อที่เสียหาย การจ่ายกระแสไฟฟ้าเกินขนาด และการชาร์จในสภาพแวดล้อมที่มีความไม่เสถียรทางอุณหภูมิ แนวทางปฏิบัติเหล่านี้เร่งให้ค่าอิมพีแดนซ์เพิ่มขึ้น ลดอายุการใช้งานแบบไซเคิล และเพิ่มความน่าจะเป็นของการล้มเหลว
IX. กลยุทธ์ในการยืดอายุการใช้งานของแบตเตอรี่
A. อัตราการชาร์จที่ควบคุมอย่างเหมาะสม
กระแสไฟฟ้าในการชาร์จที่ต่ำลงจะลดความเครียดจากความร้อนและชะลอกระบวนการเสื่อมสภาพ
B. สถานะการเก็บรักษาที่ควบคุม
การรักษาแบตเตอรี่ให้อยู่ในสถานะการชาร์จระดับปานกลางระหว่างการเก็บรักษา จะช่วยลดการเสื่อมสภาพเชิงเคมีให้น้อยที่สุด
C. การหมุนเวียนระดับฝูงยานพาหนะ
การกระจายการใช้งานไปยังแบตเตอรี่หลายชุดจะช่วยป้องกันไม่ให้แบตเตอรี่เสื่อมสภาพอย่างไม่สม่ำเสมอ และเพิ่มความน่าเชื่อถือโดยรวมของฝูงยานพาหนะ
D. การบำรุงรักษาอินเทอร์เฟซไฟฟ้า
การทำความสะอาดขั้วต่อเป็นระยะๆ จะช่วยลดการสูญเสียจากความต้านทานและเพิ่มประสิทธิภาพในการชาร์จ
X. การชาร์จภายใต้สภาวะที่ไม่มาตรฐาน
A. การทำงานที่อุณหภูมิต่ำ
การชาร์จที่อุณหภูมิต่ำจำเป็นต้องมีการให้ความร้อนล่วงหน้าและลดกระแสไฟฟ้าลง เพื่อหลีกเลี่ยงการเกิดการสะสมของลิเธียม (lithium plating)
B. การทำงานที่อุณหภูมิสูง
การชาร์จในสภาพแวดล้อมที่ร้อนจำเป็นต้องมีระบบระบายความร้อนแบบแอคทีฟ หรือย้ายสถานที่ชาร์จไปยังพื้นที่ที่มีเสถียรภาพทางอุณหภูมิ
C. ข้อจำกัดด้านการชาร์จในสนาม
แหล่งจ่ายไฟแบบพกพาต้องให้แรงดันที่มีเสถียรภาพและคลื่นสัญญาณที่มีการบิดเบือนต่ำ เพื่อหลีกเลี่ยงการทำงานผิดปกติของระบบชาร์จ
XI. การจัดการการชาร์จตามภารกิจ
A. การวางแผนปฏิบัติการ
การปฏิบัติการของโดรน (UAV) ที่มีความสำคัญต่อภารกิจจำเป็นต้องมีตารางการชาร์จที่มีโครงสร้างชัดเจน ซึ่งรวมถึงการชาร์จแบตเตอรี่ให้เต็มก่อนเริ่มภารกิจ การระบายความร้อนระหว่างภารกิจ และการปรับสภาพแบตเตอรี่ก่อนเก็บรักษาหลังเสร็จสิ้นภารกิจ
B. การตรวจสอบสุขภาพของแบตเตอรี่
การติดตามค่าความต้านทานภายใน ประวัติอุณหภูมิ และความเบี่ยงเบนของแรงดัน ช่วยให้สามารถดำเนินการบำรุงรักษาเชิงคาดการณ์ได้ และตรวจจับล่วงหน้าถึงชุดแบตเตอรี่ที่กำลังเสื่อมสภาพ
สรุป
การชาร์จแบตเตอรี่ของโดรน (UAV) เป็นกระบวนการทางวิศวกรรมที่มีหลายข้อจำกัด ซึ่งได้รับอิทธิพลจากพฤติกรรมทางอิเล็กโทรเคมี ไดนามิกความร้อน และข้อกำหนดด้านการปฏิบัติการ โปรโตคอลการชาร์จที่มีประสิทธิภาพจะช่วยเพิ่มความปลอดภัย ยืดอายุการใช้งาน และปรับปรุงความน่าเชื่อถือในการปฏิบัติภารกิจ ความเข้าใจในระดับระบบเกี่ยวกับข้อจำกัดเหล่านี้จึงมีความจำเป็นอย่างยิ่งสำหรับนักวิจัยและผู้ปฏิบัติงานทั้งในด้านการจัดการพลังงานของโดรน (UAV)
