
Abstrakcja
Moduły magazynowania energii oparte na chemii litowej są podstawowym elementem działania nowoczesnych bezzałogowych statków powietrznych (UAV). Choć baterie te są rutynowo ładowane w warunkach polowych i laboratoryjnych, sam proces ładowania podlega szeregowi ograniczeń elektrochemicznych, termicznych i operacyjnych, które często są niedoszacowane. Odchylenia od odpowiednich warunków ładowania przyspieszają degradację strukturalną, zmniejszają dostępną pojemność oraz zwiększają ryzyko katastrofalnego uszkodzenia. W niniejszym badaniu ponownie analizuje się proces ładowania baterii UAV z perspektywy inżynierii systemów, z naciskiem na interakcję między chemią ogniw, algorytmami ładowania, granicami środowiskowymi oraz wymaganiami na poziomie misji. Analiza zestawia zasady inżynierskie w spójną ramę koncepcyjną, przydatną dla badaczy i operatorów UAV.
Słowa kluczowe — Systemy energetyczne UAV, baterie litowe, regulacja ładowania, ograniczenia termiczne, bezpieczeństwo operacyjne.
I. Wprowadzenie
Ładowalne baterie litowe stały się dominującym źródłem zasilania dla małych powietrznych platform robotycznych ze względu na korzystną energię właściwą (na jednostkę masy) oraz zdolność do utrzymywania wysokich obciążeń chwilowych. Mimo ich powszechnego stosowania ładowanie tych baterii pozostaje nietrywialnym zadaniem inżynierskim. Proces ładowania jest ograniczony kinetyką interkalacji litu, stabilnością granicy fazowej stała–elektrolit (SEI) oraz zachowaniem termicznym zestawu ogniw. Te ograniczenia nakładają ścisłe ograniczenia dotyczące napięcia, prądu i temperatury podczas ładowania. W miarę jak bezzałogowe statki powietrzne (UAV) przekształcają się z urządzeń rekreacyjnych w zasoby krytyczne z punktu widzenia realizowanych zadań, rosnąca jest potrzeba ściśle określonych procedur ładowania. W niniejszej pracy analizowany jest proces ładowania z wielowarstwowego punktu widzenia inżynierskiego, łączącego podstawy elektrochemiczne z wymaganiami operacyjnymi UAV.
II. Architektury baterii w platformach UAV
A. Ogniwa typu 'pouch' z polimerowym elektrolitem
Komórki polimerowo-elektrolitowe typu 'pouch', powszechnie nazywane bateriami LiPo, wykorzystują laminowane stosy elektrod oraz żelowy elektrolit. Ich elastyczność mechaniczna umożliwia uzyskanie wysokiej gęstości energii, ale zwiększa również podatność na uszkodzenia spowodowane odkształceniem. Zakres napięć jest ściśle ograniczony stabilnością elektrolitu, a przekroczenie górnego progu powoduje nieodwracalne reakcje uboczne.
B. Komórki litowo-jonowe typu cylindrycznego i pryzmatycznego
Komórki litowo-jonowe w sztywnych obudowach charakteryzują się poprawioną odpornością strukturalną oraz dłuższą żywotnością cyklową. Ich zachowanie elektrochemiczne jest określone dynamiką interkalacji w warstwowych lub spinelowych strukturach katody. Choć ich zdolność do rozładowania jest niższa niż u komórek LiPo, to stabilność termiczna oraz przewidywalne cechy starzenia czynią je odpowiednimi dla bezzałogowych statków powietrznych (UAV) przeznaczonych do zadań wymagających wytrzymałości.
C. Zestawy akumulatorów z wbudowaną elektroniką zarządzania
Zaawansowane platformy UAV integrują systemy zarządzania baterią (BMS), które nadzorują napięcia komórek, temperatury oraz operacje balansowania. Te wbudowane systemy egzekwują granice eksploatacyjne i zapewniają informacje diagnostyczne, ale nie eliminują potrzeby kontrolowanych środowisk ładowania.
III. Ocena przed ładowaniem
A. Ocena integralności konstrukcyjnej

Przed rozpoczęciem ładowania baterię należy ocenić pod kątem anomalii mechanicznych. Odkształcenia, gromadzenie się gazów lub pozostałości elektrolitu wskazują na uszkodzoną strukturę wewnętrzną. Takie stany zmieniają impedancję wewnętrzną i mogą spowodować niestabilność termiczną w trakcie ładowania.
B. Weryfikacja stanu termicznego
Temperatura zestawu komórek ma istotny wpływ na przyjmowanie ładunku. Ładowanie w niskiej temperaturze zwalnia dyfuzję litu i sprzyja osadzaniu się metalicznego litu, podczas gdy wysoka temperatura przyspiesza reakcje poboczne. Dlatego przed rozpoczęciem ładowania wymagany jest stan termicznej równowagi.
C. Spójność konfiguracji ładowarki
Dla zestawów bez wbudowanej elektroniki zarządzającej ładowaniem, ładowarka musi być skonfigurowana zgodnie z liczbą ogniw w zestawie oraz jego chemią. Nieprawidłowa konfiguracja zmienia sufit napięcia lub profil prądu, co prowadzi do przyspieszonego zużycia lub natychmiastowego uszkodzenia.
IV. Mechanizmy regulacji ładowania
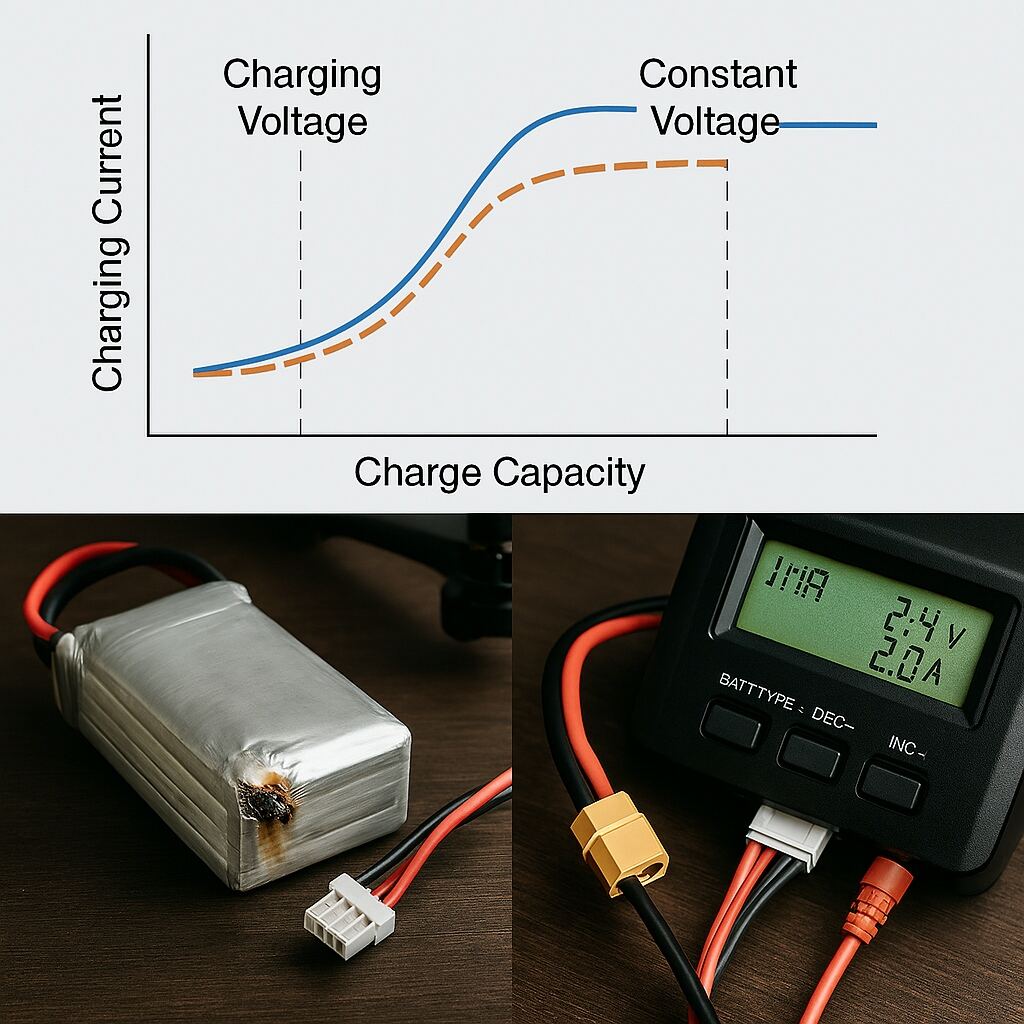
A. Dwuetapowa kontrola ładowania
Akumulatory litowe są zwykle ładowane przy użyciu dwuetapowego schematu regulacji. Pierwszy etap polega na utrzymywaniu stałego prądu, co pozwala napięciu ogniwa rosnąć zgodnie z jego wewnętrznym impedancją. Gdy napięcie osiągnie górny próg, ładowarka przechodzi do etapu stałego napięcia, podczas którego prąd stopniowo maleje. Takie podejście minimalizuje obciążenie interfejsu elektroda–elektrolit.
B. Wyrównywanie napięć między ogniwami
Pakiety wielokomórkowe wymagają wyrównywania napięć, aby zapobiec rozbieżnościom napięć komórek. Bez balansowania najsłabsza komórka określa użyteczną pojemność pakietu, a najmocniejsza komórka jest narażona na przekroczenie napięcia podczas ładowania. Obwody wyrównywania rozpraszają lub przemieszczają ładunek, aby zapewnić jednolitość napięć w całym pakiecie.
C. Dobór prądu ładowania oraz uwzględnienie degradacji
Prąd ładowania wyraża się zwykle jako ułamek nominalnej pojemności pakietu. Wyższe prądy skracają czas ładowania, ale zwiększają obciążenie cieplne i przyspieszają wzrost warstwy SEI. Niższe prądy zmniejszają degradację, ale wydłużają czas cyklu ładowania, co tworzy kompromis między tempem pracy a żywotnością baterii.
V. Procedura ładowania oraz wymagania środowiskowe
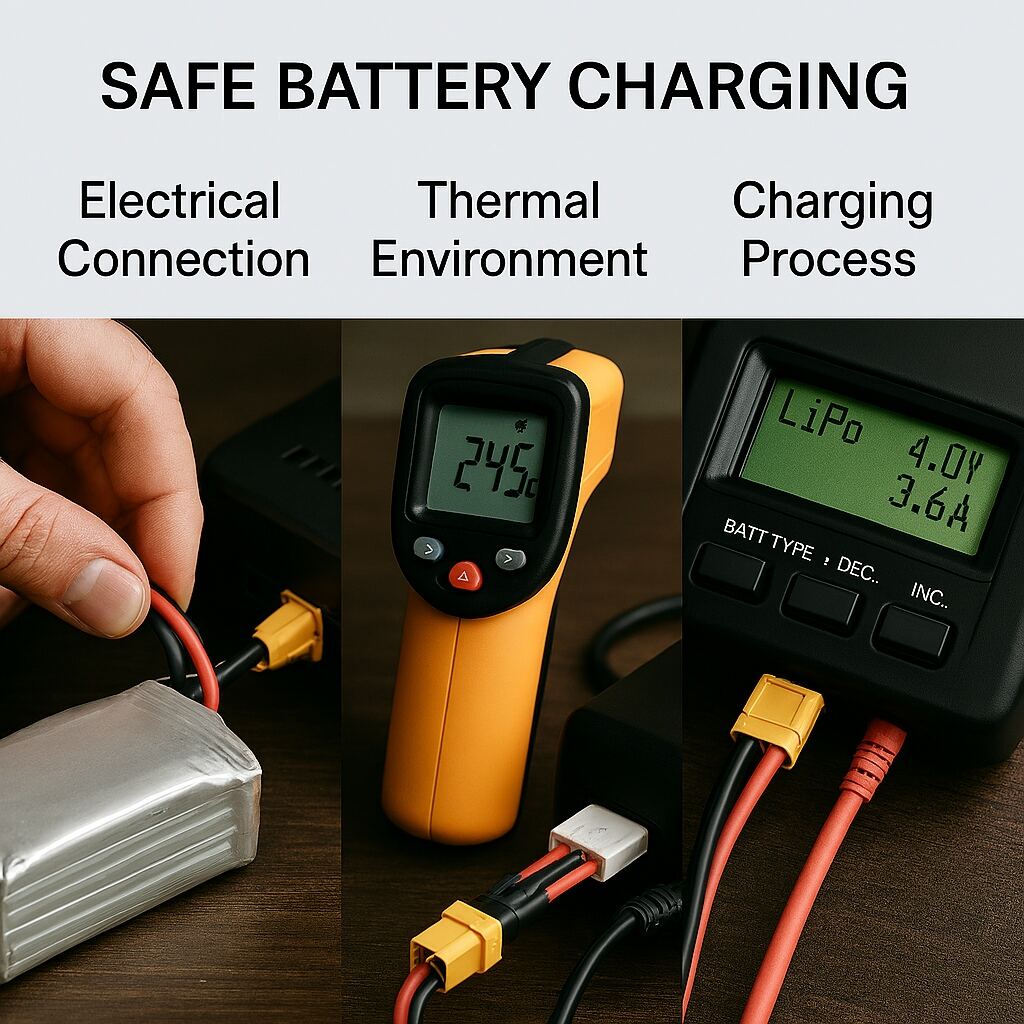
A. Interfejs elektryczny i kolejność podłączania
Ładowanie wymaga bezpiecznego podłączenia zarówno głównych przewodów zasilających, jak i – w przypadku pakietów LiPo – łącznika wyrównującego. Nieprawidłowa kolejność podłączania lub luźne połączenia powodują nagrzewanie rezystancyjne oraz niestabilność napięcia.
B. Warunki fizyczne ładowania
Środowisko ładowania musi minimalizować gromadzenie ciepła i eliminować źródła zapłonu. Powierzchnie niepalne oraz odpowiedni przepływ powietrza są niezbędne. Baterie nie powinny być umieszczane w zamkniętych przestrzeniach, w których ciepło nie może się rozpraszać.
C. Monitorowanie parametrów w czasie rzeczywistym
Podczas ładowania należy monitorować temperaturę, jednolitość napięcia oraz spadek prądu. Odchylenia od oczekiwanego zachowania wskazują na anomalie wewnętrzne, takie jak wzrost impedancji lub lokalne nagrzewanie się.
D. Stabilizacja po zakończeniu ładowania
Po zakończeniu ładowania bateria przechodzi krótki okres relaksacji, podczas którego ustępują wewnętrzne gradienty. Ta stabilizacja poprawia dokładność pomiaru napięcia oraz zmniejsza naprężenie termiczne przed wprowadzeniem baterii do eksploatacji lub przechowywaniem.
VI. Ograniczenia bezpieczeństwa i ścieżki awarii
A. Mechanizmy niestabilności termicznej
Utrata stabilności termicznej występuje, gdy reakcje egzoenergetyczne przekraczają zdolność ogniwa do odprowadzania ciepła. Przeciążenie napięciowe, zwarcia wewnętrzne oraz uszkodzenia mechaniczne mogą wywołać takie reakcje. Środki zapobiegawcze obejmują kontrolowane warunki ładowania oraz ciągłe monitorowanie.
B. Wrażliwość na czynniki środowiskowe
Wilgotność, bezpośrednie promieniowanie słoneczne oraz zamknięte przestrzenie zmieniają warunki graniczne termiczne baterii. Ładowanie w takich warunkach zwiększa prawdopodobieństwo przekroczenia bezpiecznych granic pracy.
VII. Ładowanie zarządzanych systemów bateryjnych
A. Wbudowane funkcje nadzoru
Inteligentne baterie zawierają mikrokontrolery regulujące parametry ładowania, monitorujące stan komórek oraz egzekwujące ograniczenia bezpieczeństwa. Takie systemy zmniejszają obciążenie operatora, ale nadal wymagają przestrzegania ograniczeń środowiskowych i termicznych.
B. Przepływ operacyjny
Ładowanie zwykle odbywa się za pośrednictwem dedykowanego interfejsu lub koncentratora komunikującego się z wbudowanym kontrolerem. System samodzielnie zarządza funkcjami balansowania i ochrony.
C. Ograniczenia eksploatacyjne
Mimo swojej zaawansowanej budowy inteligentne akumulatory pozostają wrażliwe na skrajne temperatury oraz długotrwałe przechowywanie w stanie pełnego naładowania. Ich funkcje ochronne nie są w stanie zrekompensować niewłaściwego obchodzenia się z nimi.
VIII. Błędy eksploatacyjne i ich implikacje inżynieryjne
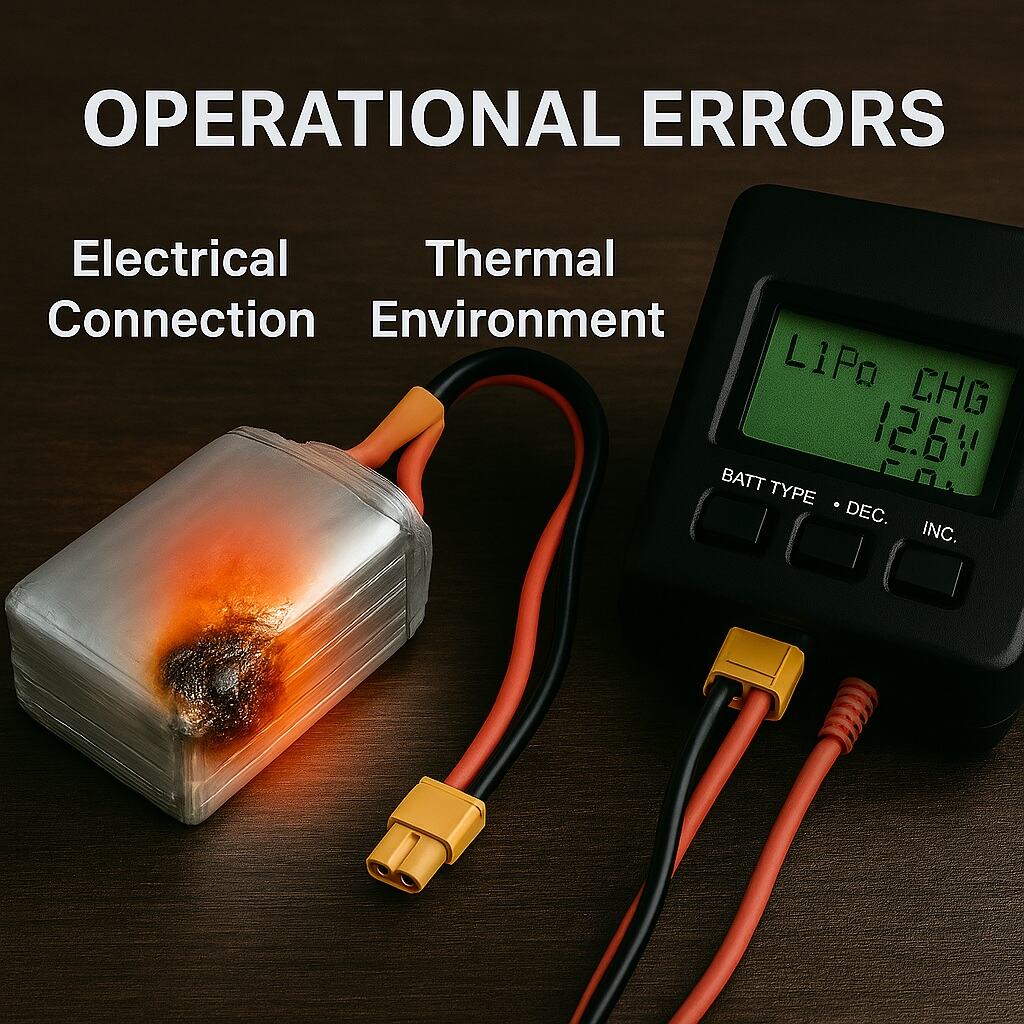
Do typowych błędów eksploatacyjnych należą: rozpoczynanie ładowania bezpośrednio po rozładowaniu przy dużym obciążeniu, używanie uszkodzonych złączy, stosowanie nadmiernego prądu oraz ładowanie w środowiskach termicznie niestabilnych. Takie praktyki przyspieszają wzrost impedancji, skracają liczbę cykli życia oraz zwiększają prawdopodobieństwo awarii.
IX. Strategie przedłużania czasu użytkowania baterii
A. Umiarkowane prędkości ładowania
Niższe prądy ładowania zmniejszają obciążenie cieplne i spowalniają procesy degradacji.
B. Kontrolowany stan przechowywania
Utrzymywanie akumulatora w pośrednim stanie naładowania podczas przechowywania minimalizuje starzenie chemiczne.
C. Rotacja na poziomie floty
Rozprowadzanie obciążenia na wiele zestawów akumulatorów zapobiega niejednorodnemu starzeniu się i poprawia ogólną niezawodność floty.
D. Konserwacja interfejsu elektrycznego
Okresowe czyszczenie złączy zmniejsza straty rezystancyjne i poprawia wydajność ładowania.
X. Ładowanie w warunkach niestandardowych
A. Eksploatacja w niskich temperaturach
Ładowanie w niskich temperaturach wymaga podgrzewania wstępne oraz ograniczenia prądu, aby uniknąć plakowania litu.
B. Eksploatacja w wysokich temperaturach
Ładowanie w gorących środowiskach wymaga aktywnego chłodzenia lub przeniesienia pojazdu do obszarów o stabilnej temperaturze.
C. Ograniczenia ładowania w terenie
Przenośne źródła zasilania muszą zapewniać stabilne napięcie i przebiegi o niskim współczynniku zniekształceń, aby uniknąć nieprawidłowego działania ładowarek.
XI. Zarządzanie ładowaniem zorientowane na misję
A. Planowanie operacyjne
Krytyczne dla misji operacje dronów wymagają zorganizowanych harmonogramów ładowania, w tym pełnego ładowania przed misją, chłodzenia między misjami oraz kondycjonowania akumulatorów po zakończeniu misji.
B. Monitorowanie stanu technicznego
Śledzenie oporu wewnętrznego, historii temperatury oraz odchylenia napięcia umożliwia przewidywane konserwacje oraz wczesne wykrywanie awarii zestawów akumulatorów.
XII. Podsumowanie
Ładowanie akumulatorów dronów to wieloograniczeniowy proces inżynierski kształtowany przez zachowania elektrochemiczne, dynamikę cieplną oraz wymagania operacyjne. Skuteczne protokoły ładowania zwiększają bezpieczeństwo, wydłużają czas eksploatacji oraz poprawiają niezawodność realizacji misji. Zrozumienie tych ograniczeń na poziomie systemowym jest niezbędne zarówno dla badaczy, jak i praktyków zajmujących się zarządzaniem energią w przypadku dronów.
