
Abstrait
Les modules de stockage d'énergie basés sur la chimie lithium sont fondamentaux pour le fonctionnement des véhicules aériens sans pilote (UAV) modernes. Bien que ces batteries soient régulièrement rechargées sur le terrain et en laboratoire, le processus de charge lui-même est régi par un ensemble de contraintes électrochimiques, thermiques et opérationnelles souvent sous-estimées. Des écarts par rapport aux conditions de charge appropriées accélèrent la dégradation structurelle, réduisent la capacité disponible et augmentent la probabilité d'une défaillance catastrophique. Cette étude réexamine la charge des batteries d'UAV sous l'angle de l'ingénierie des systèmes, en mettant l'accent sur les interactions entre la chimie des cellules, les algorithmes de charge, les limites environnementales et les exigences au niveau de la mission. L'analyse consolide les principes d'ingénierie dans un cadre unifié adapté aux chercheurs et aux opérateurs travaillant sur les UAV.
Mots-clés— Systèmes énergétiques pour UAV, batteries à base de lithium, régulation de la charge, contraintes thermiques, sécurité opérationnelle.
I. Introduction
Les batteries lithium rechargeables sont devenues la source d’alimentation dominante pour les petites plates-formes robotiques aériennes, en raison de leur énergie massique favorable et de leur capacité à supporter des charges transitoires élevées. Malgré leur omniprésence, la charge de ces batteries reste une tâche d’ingénierie non triviale. Ce processus est contraint par la cinétique de l’intercalation du lithium, la stabilité de l’interface solide–électrolyte (SEI) et le comportement thermique de l’empilement de cellules. Ces contraintes imposent des limites strictes en matière de tension, de courant et de température pendant la charge. À mesure que les drones passent du statut d’appareils récréatifs à celui d’actifs critiques pour les missions, la nécessité de procédures de charge rigoureusement définies devient de plus en plus importante. Cet article analyse le processus de charge sous un angle d’ingénierie multicouche, intégrant les fondements électrochimiques aux exigences opérationnelles des drones.
II. Architectures de batteries dans les plates-formes UAV
A. Cellules souples à électrolyte polymère
Les cellules polymères à électrolyte en poche, couramment appelées batteries LiPo, utilisent des empilements d’électrodes laminés et un électrolyte de type gel. Leur flexibilité mécanique permet une densité énergétique élevée, mais augmente également leur sensibilité aux défaillances induites par la déformation. La plage de tension est strictement limitée par la stabilité de l’électrolyte, et le dépassement du seuil supérieur déclenche des réactions secondaires irréversibles.
B. Cellules cylindriques et prismatiques au lithium-ion
Les cellules au lithium-ion dotées d’enveloppes rigides présentent une robustesse structurelle améliorée et une durée de vie en cycles plus longue. Leur comportement électrochimique est régi par les dynamiques d’intercalation au sein de structures cathodiques en couches ou en spinelle. Bien que leur capacité de décharge soit inférieure à celle des cellules LiPo, leur stabilité thermique et leurs caractéristiques de vieillissement prévisibles les rendent adaptées aux UAV conçus pour des missions d’endurance.
C. Batteries équipées d’électronique intégrée de gestion
Les plates-formes UAV avancées intègrent des systèmes de gestion de batterie (BMS) qui supervisent les tensions des cellules, les températures et les opérations d’équilibrage. Ces systèmes embarqués appliquent des limites opérationnelles et fournissent des informations de diagnostic, mais ils n’éliminent pas la nécessité d’environnements de charge contrôlés.
III. Évaluation préalable à la charge
A. Évaluation de l’intégrité structurelle

Avant d’initier la charge, la batterie doit être évaluée afin de détecter d’éventuelles anomalies mécaniques. Une déformation, une accumulation de gaz ou des résidus d’électrolyte indiquent une structure interne compromise. De telles conditions modifient l’impédance interne et peuvent déclencher une instabilité thermique pendant la charge.
B. Vérification de l’état thermique
La température de l’empilement de cellules influence fortement l’acceptation de la charge. La charge à basse température ralentit la diffusion du lithium et favorise le dépôt de lithium métallique, tandis que des températures élevées accélèrent les réactions parasites. Un état thermiquement équilibré est donc requis avant toute charge.
C. Cohérence de la configuration du chargeur
Pour les modules sans électronique de gestion intégrée, le chargeur doit être configuré pour correspondre au nombre de cellules et à la chimie du module. Une configuration incorrecte modifie le seuil de tension ou le profil de courant, ce qui entraîne une dégradation accélérée ou une défaillance immédiate.
IV. Mécanismes de régulation de la charge
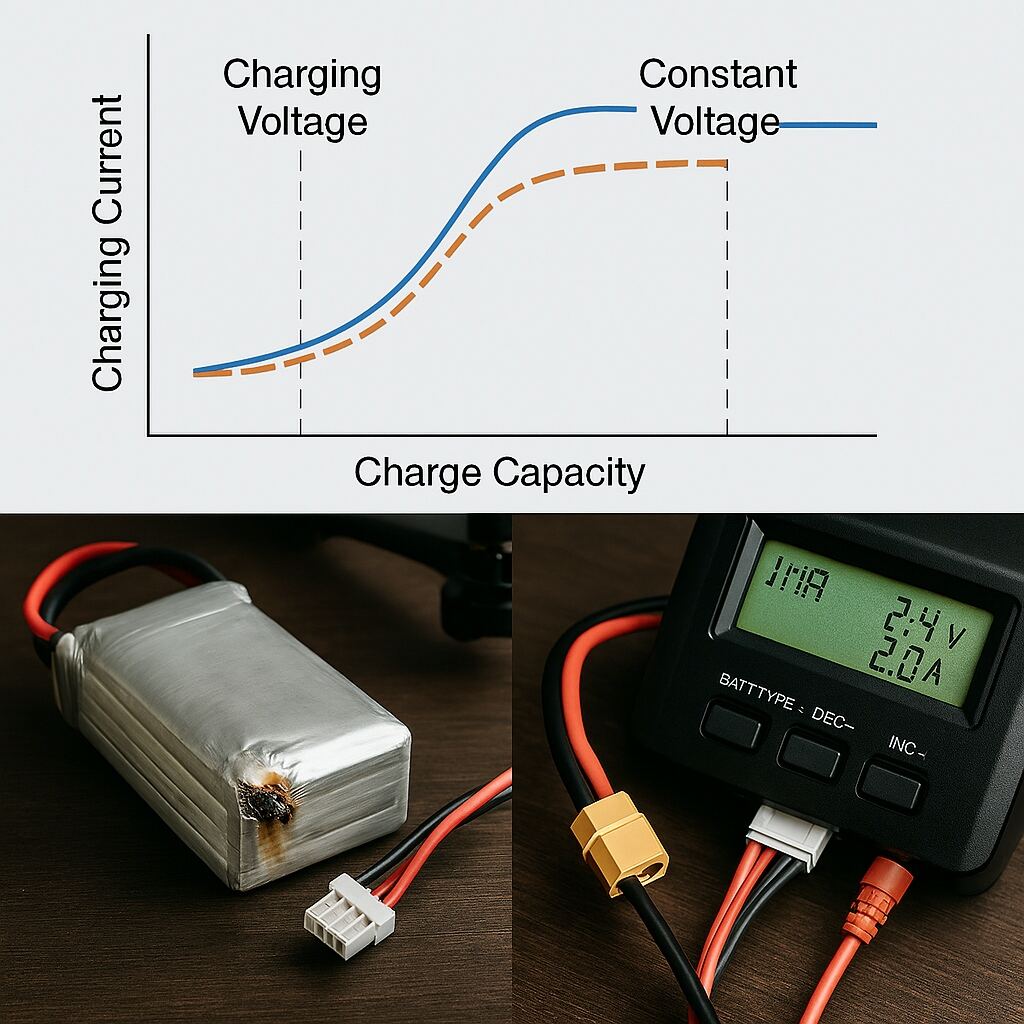
A. Commande de charge en deux étapes
Les batteries lithium sont généralement chargées selon un schéma de régulation en deux étapes. La première étape maintient un courant constant, permettant à la tension de la cellule d’augmenter conformément à son impédance interne. Dès que la tension atteint le seuil supérieur, le chargeur passe en mode tension constante, durant lequel le courant diminue progressivement. Cette approche minimise les contraintes exercées sur l’interface électrode–électrolyte.
B. Équilibrage entre cellules
Les packs multicellules nécessitent une égalisation afin d’éviter la divergence des tensions cellulaires. En l’absence d’équilibrage, la cellule la plus faible détermine la capacité utilisable, tandis que la cellule la plus forte risque une surtension lors de la charge. Les circuits d’égalisation dissipent ou redistribuent la charge afin de maintenir une uniformité au sein du pack.
C. Choix du courant et considérations liées à la dégradation
Le courant de charge est généralement exprimé sous forme d’une fraction de la capacité nominale du pack. Des courants plus élevés réduisent le temps de charge, mais augmentent la charge thermique et accélèrent la croissance de la couche SEI. Des courants plus faibles réduisent la dégradation, mais allongent le temps de cycle, créant ainsi un compromis entre le rythme opérationnel et la longévité de la batterie.
V. Procédure de charge et exigences environnementales
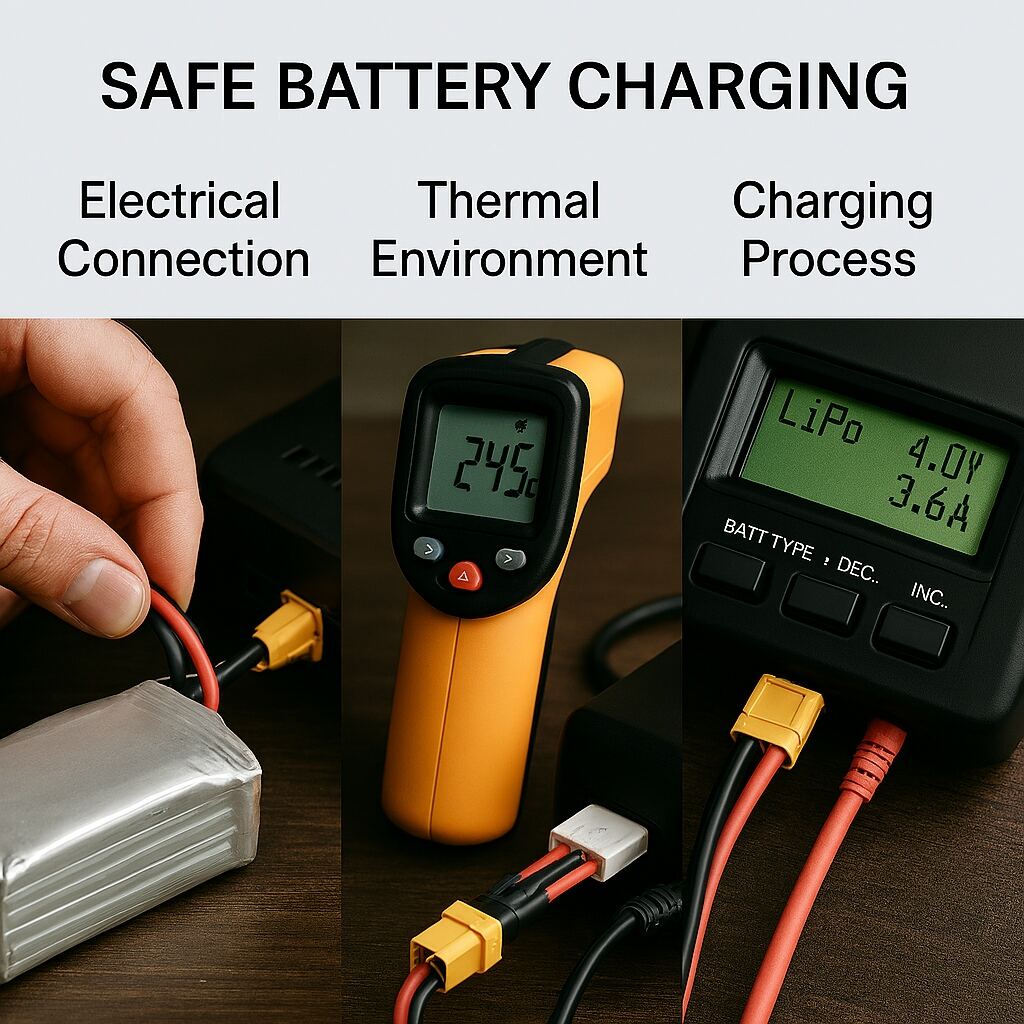
A. Interface électrique et ordre de raccordement
La charge exige le raccordement sécurisé à la fois des câbles principaux d’alimentation et, pour les packs LiPo, du connecteur d’équilibrage. Un séquencement incorrect ou des connexions desserrées provoquent un échauffement résistif et une instabilité de tension.
B. Environnement physique de charge
L'environnement de charge doit minimiser l'accumulation thermique et éliminer toute source d'inflammation. Des surfaces non inflammables et un débit d'air adéquat sont essentiels. Les batteries ne doivent pas être placées dans des espaces confinés où la chaleur ne peut pas se dissiper.
C. Surveillance en temps réel des paramètres
Pendant la charge, il faut surveiller la température, l'uniformité de la tension et la décroissance du courant. Des écarts par rapport au comportement attendu indiquent des anomalies internes, telles qu'une augmentation de l'impédance ou un échauffement localisé.
D. Stabilisation après la charge
Après la charge, la batterie subit une brève période de relaxation durant laquelle les gradients internes se dissipent. Cette stabilisation améliore la précision de la tension et réduit les contraintes thermiques avant la mise en service ou le stockage.
VI. Contraintes de sécurité et scénarios de défaillance
A. Mécanismes d'instabilité thermique
La défaillance thermique se produit lorsque les réactions exothermiques dépassent la capacité de la cellule à dissiper la chaleur. Une surtension, des courts-circuits internes et des dommages mécaniques peuvent déclencher de telles réactions. Les mesures préventives comprennent l’utilisation d’environnements de charge contrôlés et une surveillance continue.
B. Sensibilité aux conditions environnementales
L’humidité, le rayonnement solaire direct et les espaces confinés modifient les conditions limites thermiques de la batterie. La charge dans de telles conditions augmente la probabilité de dépasser les limites de fonctionnement sécurisées.
VII. Chargement des systèmes de batteries gérés
A. Fonctions de supervision intégrées
Les batteries intelligentes intègrent des microcontrôleurs qui régulent les paramètres de charge, surveillent l’état des cellules et appliquent les limites de sécurité. Ces systèmes allègent la charge de travail de l’opérateur, mais exigent tout de même le respect des contraintes environnementales et thermiques.
B. Flux opérationnel
La charge s'effectue généralement via une interface ou un concentrateur dédié qui communique avec le contrôleur intégré. Le système gère de manière autonome les fonctions d'équilibrage et de protection.
C. Limitations opérationnelles
Malgré leur sophistication, les batteries intelligentes restent sensibles aux extrêmes de température et au stockage prolongé à un état de charge élevé. Leurs fonctions de protection ne peuvent pas compenser une manipulation inadéquate.
VIII. Erreurs opérationnelles et leurs implications techniques
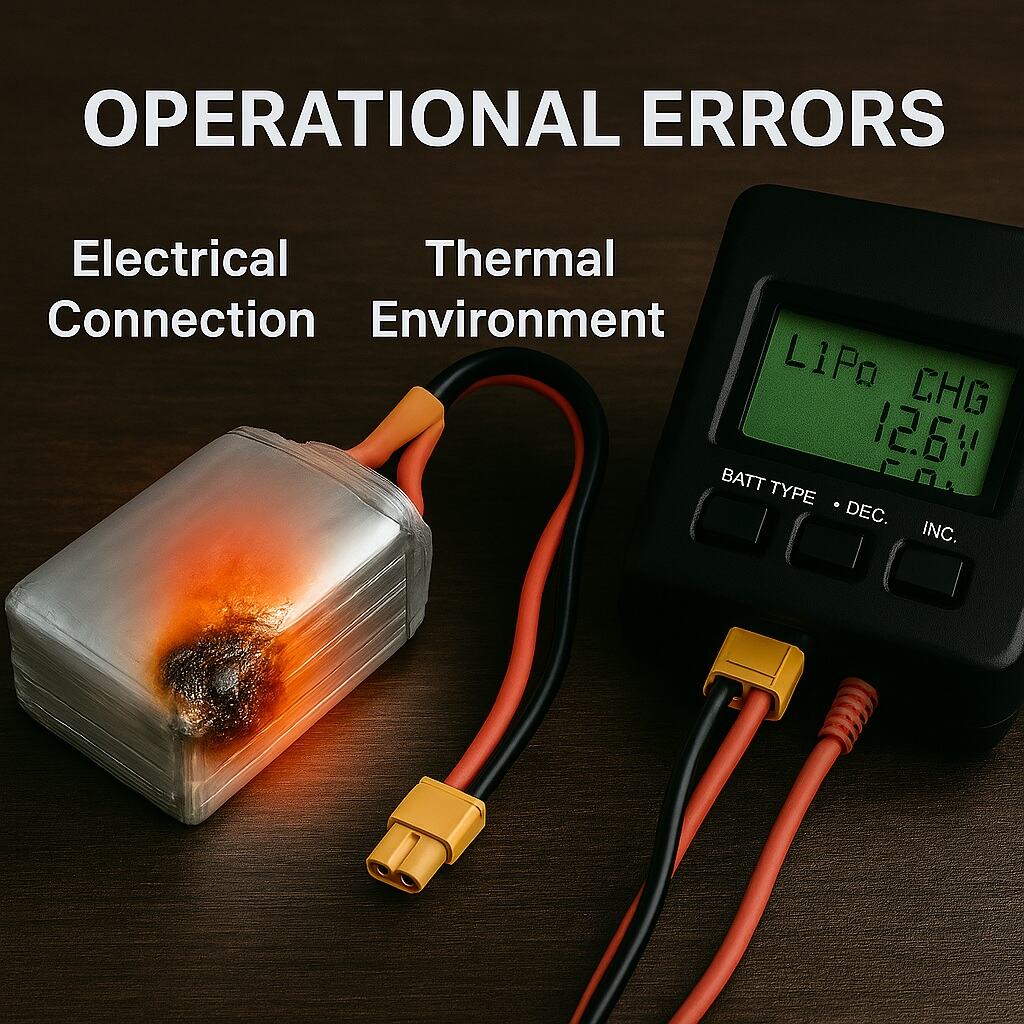
Les erreurs opérationnelles courantes comprennent le démarrage immédiat de la charge juste après une décharge à forte charge, l'utilisation de connecteurs endommagés, l'application d'un courant excessif et la charge dans des environnements thermiquement instables. Ces pratiques accélèrent la croissance de l'impédance, réduisent la durée de vie en cycles et augmentent la probabilité de défaillance.
IX. Stratégies pour prolonger la durée de service de la batterie
A. Vitesses de charge modérées
Des courants de charge plus faibles réduisent les contraintes thermiques et ralentissent les mécanismes de dégradation.
B. État de stockage contrôlé
Maintenir la batterie à un état de charge intermédiaire pendant le stockage minimise le vieillissement chimique.
C. Rotation au niveau du parc
Répartir l'utilisation entre plusieurs batteries évite un vieillissement inégal et améliore la fiabilité globale du parc.
D. Maintenance de l'interface électrique
Le nettoyage périodique des connecteurs réduit les pertes résistives et améliore l'efficacité de la charge.
X. Chargement dans des conditions non standard
A. Fonctionnement à basse température
Le chargement à basse température nécessite un préchauffage et une réduction du courant afin d'éviter le dépôt de lithium.
B. Fonctionnement à haute température
Le chargement dans des environnements chauds exige un refroidissement actif ou un déplacement vers des zones thermiquement stables.
C. Contraintes de charge sur le terrain
Les sources d’alimentation portables doivent fournir une tension stable et des formes d’onde à faible distorsion afin d’éviter tout dysfonctionnement du chargeur.
XI. Gestion de la charge orientée mission
A. Planification opérationnelle
Les opérations critiques de drones (UAV) exigent des calendriers de charge structurés, notamment une charge complète avant la mission, un refroidissement entre les missions et un conditionnement pour le stockage après la mission.
B. Surveillance de l’état
Le suivi de la résistance interne, de l’historique thermique et des écarts de tension permet une maintenance prédictive et une détection précoce des batteries défaillantes.
XII. Conclusion
La charge des batteries de drones (UAV) est un processus d’ingénierie soumis à de multiples contraintes, déterminé par le comportement électrochimique, la dynamique thermique et les exigences opérationnelles. Des protocoles de charge efficaces améliorent la sécurité, prolongent la durée de vie utile et renforcent la fiabilité des missions. Une compréhension systémique de ces contraintes est essentielle tant pour les chercheurs que pour les praticiens spécialisés dans la gestion énergétique des UAV.
