
At forudsige, hvor længe en drone kan holde sig i luften, kan synes at være en simpel sag af at læse en producentens specifikationsliste, men i praksis er det en af de mest nuancerede beregninger inden for området for ubemandede luftfartøjer. Flyvetiden er ikke en fast egenskab, men et fremkommet resultat af elektriske, mekaniske, aerodynamiske og miljømæssige interaktioner. Ingeniører, piloter og forskere stoler alle på præcise estimater af holdbarhed for at planlægge missioner, udvikle fremdriftssystemer og vurdere batteriteknologier. At forstå, hvordan man beregner en drones flyvetid, kræver derfor en helhedslig betragtning af dronen som et energikonversionssystem snarere end som en samling isolerede komponenter.
I hjertet af beregningen ligger forholdet mellem lagret energi og strømforbrug en dronebatteri fungerer som en reservoir af kemisk energi, som omdannes til elektrisk energi og derefter til mekanisk fremdrift. Flyvetiden afhænger af, hvor hurtigt denne reservoir tømmes. Selvom det grundlæggende princip minder om brændstofforbrugsmodellen for traditionelle luftfartøjer, introducerer elektrisk fremdrift unikke egenskaber såsom spændningsfald, ikke-lineære afladningskurver og temperaturafhængig ydeevne. Disse faktorer gør estimering af flyvetid både teknisk interessant og driftsmæssigt kritisk.
For at begynde med skal energien, der er tilgængelig i en drones batteri, kvantificeres. De fleste forbrugs- og professionelle droner bruger lithium-polymer (LiPo) eller lithium-ion (Li-ion)-batteripakker, hvis kapaciteter normalt angives i milliampere-timer. Kapaciteten alene bestemmer dog ikke energien; også spændingen skal tages i betragtning. Et batteris samlede energi er produktet af dets kapacitet og dens nominelle spænding og udtrykkes i watt-timer. Denne omregning er afgørende, fordi efforbruget måles i watt, og holdbarheden er til sidst forholdet mellem watt-timer og watt. Selv denne omregning fanger dog ikke fuldt ud det reelle driftsforløb. Batterier leverer sjældent deres fulde angivne kapacitet på grund af intern modstand, aldring og sikkerhedsgrænser for minimumsspænding. Som resultat arbejder ingeniører ofte med "brugbar energi", en nedsat værdi, der afspejler praktiske begrænsninger frem for laboratorie-specifikationer.
Når den tilgængelige energi er forstået, rettes opmærksomheden mod dronens efforbrug. For multikopterplatforme udgør fremdriften den overvejende del af energiforbruget. Hver motor skal generere tilstrækkelig stødkraft til at modvirke dronens vægt, og den effekt, der kræves for at generere denne stødkraft, stiger kraftigt, når belastningen øges. Forholdet mellem stødkraft og effekt styres af propellerns aerodynamik og motorens virkningsgrad, begge afhænger af omdrejningshastigheden. En drone, der svæver ved en behagelig gasstilling, forbruger betydeligt mindre effekt end en drone, der opererer tæt på sin maksimale stødkraftkapacitet. Dette er grunden til, at tilføjelser til lasten – selv små – kan mærkbart reducere flyvetiden: de presser fremdriftssystemet ind i en mindre effektiv driftsregion.
Svæveeffekt bruges ofte som en basis for estimering af holdbarhed, fordi den repræsenterer en stationær tilstand. Måling af svævestrøm og -spænding giver en direkte vurdering af efforbruget. I praksis består de fleste missioner dog sjældent udelukkende af svævning. Fremadrettet flyvning, stigning, bremsning og manøvrering påvirker alle motorerne med dynamiske belastninger. Vind tilføjer yderligere variabilitet og kan nogle gange øge efforbruget markant. Af denne grund er holdbarhedsberegninger, der udelukkende bygger på svævedata, ofte for optimistiske. Mere præcise prognoser kræver en forståelse af, hvordan efforbruget svinger gennem hele missionsprofilen.
Missionbaseret modellering opdeler en flyvning i segmenter – start, stigning, cruise, nedstigning og landing – og tildeler hvert segment en effektværdi. Start og stigning kræver typisk den højeste effekt, mens nedstigning ofte kræver meget lidt. Cruise-effekten afhænger af luftfart, aerodynamisk modstand og translational lift. Multikopterdroner oplever en moderat reduktion af efforbrug under fremadrettet flyvning, fordi luftstrømmen gennem propellerne bliver mere effektiv, men denne fordel er ofte kompenseret af øget modstand fra flykroppen og lasten. Ved at vægte hvert segment i forhold til dets varighed kan ingeniører beregne en gennemsnitlig effektværdi, der bedre afspejler den faktiske drift.
Miljøforhold forværrer yderligere estimeringen af dronestationeringstid. Luftdensiteten falder med højden og temperaturen, hvilket reducerer propellereffektiviteten og tvinger motorerne til at dreje hurtigere for at opretholde tryk. Koldt vejr nedsætter batteriydelsen ved at bremse de kemiske reaktioner, mens varmt vejr øger den termiske belastning på motorer og elektroniske hastighedsregulatorer. Vind har især stor indflydelse: at flyve mod en kraftig modvind kan fordoble effektförbruget, mens at flyve med medvind kan reducere det. Da miljømæssig variabilitet er uundgåelig, inkluderer beregninger af dronestationeringstid ofte en sikkerhedsmargin for at sikre, at dronen kan vende hjem, selv under forringede forhold.
En anden vigtig faktor er batteriets egen sundhed. Med tiden nedbryder gentagne opladnings- og afladningscyklusser batteriets indre kemiske sammensætning, hvilket øger modstanden og reducerer kapaciteten. Denne nedbrydning viser sig som spændingsfald under belastning, hvilket kan udløse lavspændingsadvarsler for tidligt og forkorte flyvetiden. Ved at overvåge batterisundheden gennem målinger af den indre modstand og antallet af cyklusser kan operatører forudse ydelsesnedgangen og udskifte batterierne, inden de bliver upålidelige. For langsiget flådeadministration er det lige så vigtigt at følge batteriets aldring som at beregne flyvetiden.
Lasteegenskaber påvirker også holdbarheden på måder, der går ud over vægten. Mange professionelle laster – såsom LiDAR-scannere, multispektrale kameraer og kommunikationsmoduler – trækker elektrisk strøm fra dronens batteri. Denne ekstra energiforbrug skal lægges til fremdriftsenergiforbruget, når den samlede energiforbrug beregnes. En last, der trækker 20 watt, kan synes ubetydelig, men over en 30-minutters mission forbruger den 10 watt-timer, hvilket kan reducere flyvetiden med flere minutter. Ingeniører skal derfor tage både de mekaniske og de elektriske virkninger af laster i betragtning, når holdbarheden beregnes.
Valg af propeller spiller en overraskende stor rolle for optimering af flyvetiden. Større propellere med lavere pitch er ofte mere effektive til at generere trækkraft ved lave omdrejningshastigheder, hvilket gør dem ideelle til droner, der fokuserer på langvarig brug. Mindre propellere med høj pitch producerer mere trækkraft ved høje hastigheder, men er mindre effektive ved svævning. At afstemme propelleregenskaberne til missionskravene kan give betydelige forbedringer af flyvetiden. På samme måde påvirker motorens KV-værdi – antallet af omdrejninger pr. volt – effektiviteten. Motorer med lav KV-værdi kombineret med store propellere lever ofte bedre langvarig brug, da de opererer effektivt ved lavere omdrejningstal.
For at forbedre prædiktioner af holdbarhed bruger ingeniører ofte empirisk testning. Trykstænder giver detaljerede målinger af tryk, strøm, spænding og effektivitet for specifikke motor-propeller-kombinationer. Disse data gør det muligt for ingeniører at opstille ydeskurver, der afbilder efforbrug i forhold til trykudbytte. Ved at kende dronens vægt kan man bestemme det nødvendige tryk pr. motor og aflæse den tilsvarende effektværdi fra kurven. Denne metode er langt mere præcis end at stole på producentens specifikationer eller simple svæve-målinger.
Moderne droner genererer også omfattende telemetridata, der registrerer strøm, spænding, gasstilling og motorens omdrejningstal gennem hele en flyvning. Analyse af disse data giver indsigt i, hvordan strømforbruget varierer under reelle forhold. Med tiden kan operatører opbygge prediktive modeller, der er tilpasset deres specifikke drone, last og missionstype. Nogle avancerede systemer bruger endda maskinlæring til at forudsige flyvetid baseret på historiske data, miljømæssige input og missionsparametre.
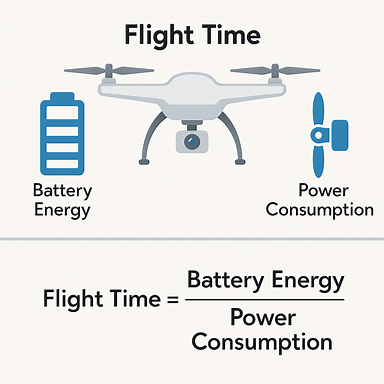
Trods kompleksiteten i disse faktorer forbliver den grundlæggende beregning elegant simpel: flyvetid er lig med brugbar energi divideret med gennemsnitlig efforbrug. Udfordringen består i at fastslå disse to værdier præcist. Brugbar energi afhænger af batterikemi, temperatur, aldring og afladningsgrænser. Gennemsnitlig efforbrug afhænger af vægt, aerodynamik, fremdriftseffektivitet, missionsdynamik og miljøforhold. Ved systematisk analyse af hver enkelt faktor kan ingeniører udarbejde meget pålidelige holdbarhedsestimater.
I professionelle operationer er vurdering af holdbarhed ikke blot en teknisk øvelse, men en sikkerhedskrav. Reguleringsrammer kræver ofte, at droner opretholder reserveenergi til uventede begivenheder såsom vindændringer eller nødlandinger. Præcis forudsigelse af flyvetid sikrer overholdelse af disse regler og reducerer risikoen for strømtab i luften. For kommercielle anvendelser såsom kortlægning, inspektion og udbringning påvirker holdbarheden direkte produktiviteten og omkostningseffektiviteten. En drone, der kan blive i luften endda et par minutter længere, kan dække betydeligt større områder eller udføre yderligere opgaver pr. mission.
Set med fremtiden i tankerne lover fremskridt inden for batteriteknologi at omforme beregningerne af holdbarhed. Lithium-svovl-, faststof- og batterier med anoder med højt siliciumindhold tilbyder højere energitætheder end de nuværende LiPo- og Li-ion-kemi. Brændselsceller baseret på brint samt hybride strømforsyningssystemer giver alternative muligheder for udvidet flyvetid, især for store droner. Når disse teknologier modne, vil metoderne til beregning af holdbarhed udvikle sig, men de underliggende principper for energi og effekt vil forblive centrale.
Sammenfattende kræver beregning af dronens flyvetid en omfattende forståelse af, hvordan energi lagres, konverteres og forbruges. Selvom den grundlæggende formel er simpel, kræver præcision i den virkelige verden omhyggelig overvejelse af batteriets adfærd, fremdriftseffektiviteten, missionsdynamikken, miljøpåvirkningerne og lastens egenskaber. Ved at kombinere teoretisk modellering med empirisk testning og dataanalyse kan ingeniører forudsige flyvetiden med tillid og optimere dronerne til de mange forskellige missioner, de er designet til at udføre. Driftstid er ikke blot en specifikation; den afspejler dronens samlede designkvalitet og operationelle klarhed.
