
Drone'ning havoda qancha vaqt turishini bashorat qilish, ishlab chiqaruvchining texnik xususiyatlar varaqasini o'qish oddiy ishga o'xshashi mumkin, lekin amaliyotda bu boshqarilmas havo tizimlari sohasidagi eng nuansli hisob-kitoblardan biridir. Parvoz vaqti doimiy xususiyat emas, balki elektr, mexanik, aerodinamik va atrof-muhit o'zaro ta'sirlarining vujudga kelgan natijasidir. Muhandislarning, pilotlarning va tadqiqotchilarning barchasi vazifalarni rejalashtirish, tortish tizimlarini loyihalash va batareyalar texnologiyalarini baholash uchun aniq parvoz davomiyligini aniqlashga tayanadi. Shu sababli drone parvoz vaqtini hisoblash usullarini tushunish uchun drone'ni alohida komponentlar to'plami sifatida emas, balki energiya o'zgartirish tizimi sifatida butunlikda ko'rish talab etiladi.
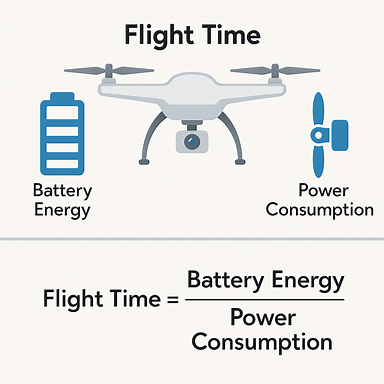
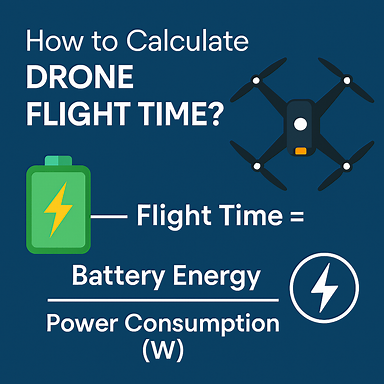
Hisob-kitobning asosida quyidagi munosabat yotadi: saqlangan energiya va quvvat iste'moli dronning batareyasi kimyoviy energiya ombori sifatida ishlaydi, bu esa elektr energiyasiga, so‘ngra mexanik itarish kuchiga aylanadi. Uchish davomiyligi bu ombor qanchalik tez bo‘shayotganligiga bog‘liq. Asosiy prinsip anʼanaviy samolyotlarning yoqilg‘i sarfi modeliga o‘xshasa ham, elektr harakatlantirish quyidagi noyob xususiyatlarga ega: kuchlanish pasayishi, chiziqli bo‘lmagan zaryadlanish egri chizig‘i va haroratga bog‘liq ishlash. Bu omillar parvoz davomiyligini baholashni ham texnik jihatdan qiziqarli, ham operatsion jihatdan muhim qiladi.
Boshlanish uchun, dron batareyasidagi mavjud energiya miqdori aniqlanishi kerak. Ko'pchilik iste'molchi va professional dronlar odatda litiy-polimer (LiPo) yoki litiy-ion (Li-ion) batareyalaridan foydalanadi, ularning quvvati odatda milliamper-soatda ifodalanadi. Biroq, faqatgina quvvat energiyani aniqlamaydi; shuningdek, kuchlanish ham hisobga olinishi kerak. Batareyaning umumiy energiyasi uning quvvati va nominal kuchlanishining ko'paytmasi bo'lib, vatt-soatda ifodalanadi. Bu aylantirish zarur, chunki quvvat iste'moli vattlarda o'lchanadi va parvoz davomiyligi oxir-oqibat vatt-soatni vattga nisbati bilan aniqlanadi. Biroq, hatto bu aylantirish ham haqiqiy dunyo sharoitlarini to'liq aks ettirmaydi. Batareyalar ichki qarshilik, eskirish va minimal kuchlanish bo'yicha xavfsizlik chegaralari tufayli o'zlarining belgilangan quvvatlarining butunini yetkazib bera olmaydi. Shu sababli muhandislar odatda laboratoriya spetsifikatsiyalari emas, balki amaliy cheklovlar bilan bog'liq bo'lgan «foydalanish mumkin bo'lgan energiya» deb ataladigan pasaytirilgan qiymat bilan ishlaydilar.
Mavjud energiya tushunilgandan so'ng, e'tibor dronning quvvat iste'moli ga qaratiladi. Ko'p rotorli platformalar uchun tortish kuchi tizimi energiya iste'molining aksariyat qismini tashkil qiladi. Har bir dvigatel dronning og'irligini kompensatsiya qilish uchun yetarli tortish kuchini yaratishi kerak; shu tortish kuchini hosil qilish uchun talab qilinadigan quvvat yuk ortishi bilan tezda o'sadi. Tortish kuchi va quvvat o'rtasidagi munosabat propeller aerodinamikasi va dvigatel samaradorligiga bog'liq bo'lib, ularning ikkalasi ham aylanish tezligiga qarab o'zgaradi. Qulay gaz darajasida parvoz qilayotgan dron maksimal tortish kuchi imkoniyatlariga yaqin ishlayotgan drondan ancha kam quvvat iste'mol qiladi. Shuning uchun yukning (hatto maydona) qo'shilishi parvoz vaqtini sezilarli darajada qisqartirishi mumkin: chunki bu tortish kuchi tizimini kamroq samarali ishlash sohasiga o'tkazadi.
Uchish vaqtida quvvat iste'moli ko'pincha barqaror holatni ifodalaydigan ko'rsatkich sifatida davom etish vaqtini baholash uchun asos sifatida ishlatiladi. Uchish paytida tok va kuchlanishni o'lchash quvvat iste'molini to'g'ridan-to'g'ri baholash imkonini beradi. Biroq, amaliy vazifalar deyarli hech qachon to'la uchishdan iborat bo'lmaydi. Oldinga uchish, ko'tarilish, to'xtatish va manevrlar motorlarga dinamik yuklamalarni qo'llaydi. Shamol qo'shimcha o'zgaruvchanlikni keltirib chiqaradi va ba'zan quvvat iste'molini keskin oshiradi. Shu sababli, faqat uchish ma'lumotlariga asoslangan davom etish vaqti hisob-kitoblari ko'pincha optimistik bo'ladi. Aniqroq bashoratlar vazifa profilida quvvatning qanday o'zgarishini tushunishni talab qiladi.
Vazifaga asoslangan modellashtirish parvozni segmentlarga—qo‘nish, ko‘tarilish, parvoz, tushish va qo‘nishga bo‘lib, har biriga quvvat qiymati belgilaydi. Qo‘nish va ko‘tarilish odatda eng yuqori quvvatni talab qiladi, shu bilan birga tushish juda kam quvvat talab qilishi mumkin. Parvoz quvvati havo tezligiga, aerodinamik qarshilikka va translatsion ko‘taruv kuchiga bog‘liq. Ko‘p rotorli dronlar oldinga parvoz davomida quvvatni biroz kamaytiradi, chunki propellerlardan o‘tayotgan havo oqimi samaraliroq bo‘ladi, lekin bu foyda odatda avtomashina korpusi va yuk tufayli ortib ketgan qarshilik bilan kompensatsiya qilinadi. Har bir segmentni uning davomiyligiga qarab vaznlab, muhandislar amaliyot haqiqatini yaxshiroq aks ettiradigan o‘rtacha quvvat qiymatini hisoblashlari mumkin.
Atmosfera sharoiti davom etish muddatini baholashni yanada murakkablashtiradi. Havo zichligi balandlik va harorat bilan kamayadi, bu esa propeller samaradorligini pasaytiradi va siljishni saqlash uchun dvigatellarga tezroq aylanishga majbur qiladi. Sovuq ob-havo kimyoviy reaksiyalarning sekinlashishiga sabab bo'lib, batareyaning ishlashini pasaytiradi, sovuq ob-havo esa dvigatellar va elektron tezlik boshqaruv qurilmalariga issiqlik kuchlanishini oshiradi. Shamol ayniqsa ta'sirchan: kuchli qarshi shamolga qarshi uchish quvvat iste'molini ikki baravar oshirishi mumkin, so'nggi shamol bilan uchish esa uni kamaytirishi mumkin. Chunki atmosfera sharoitining o'zgaruvchanligi bekor qilinmas, shuning uchun davom etish muddati hisob-kitoblari ko'pincha dronning sharoitlar yomonlashganda ham uyga qaytishini ta'minlash uchun xavfsizlik cheggarasini o'z ichiga oladi.
Boshqa muhim omil — batareyaning o'zining sog'lig'i. Vaqt o'tishi bilan takroriy zaryadlash-razryadlash tsikllari batareyaning ichki kimyoviy tarkibini buzadi, qarshilikni oshiradi va quvvatni kamaytiradi. Bu buzilish yuk ostida kuchlanishning pasayishiga sabab bo'ladi, bu esa past kuchlanish haqida ogohlantirishlarni erta ishga tushirib, parvoz vaqtini qisqartirishi mumkin. Batareyaning sog'lig'ini ichki qarshilik o'lchovlari va tsikllar soni orqali kuzatish operatorlarga ishlash samaradorligining pasayishini oldindan bashorat qilishga va batareyalarni ishonchsiz bo'lishidan oldin almashtirishga imkon beradi. Uzoq muddatli flot boshqaruvi uchun batareyaning yoshirovchi jarayonini kuzatish parvoz vaqtini hisoblash bilan bir xil ahamiyatga ega.
Yuk xususiyatlari ham, og'irligidan tashqari, parvoz davomiyligiga ta'sir qiladi. LiDAR skanerlari, ko'p spektrli kamerlar va aloqa modullari kabi ko'plab professional yuklar dronning akkumulyatoridan elektr energiyasini oladi. Umumiy energiya sarfi taxmin qilinayotganda, bu qo'shimcha iste'mol propulsion (harakatlanish) quvvatiga qo'shilishi kerak. 20 vattlik yuk nisbatan kichik tuyulsa ham, 30 daqiqalik vaziyatda u 10 vatt-soat energiya iste'mol qiladi, bu esa parvoz vaqtini bir necha daqiqa qisqartirishi mumkin. Shu sababli muhandislar parvoz davomiyligini hisoblashda yuklarning mexanik hamda elektr ta'sirini ham hisobga olishlari kerak.
Vint tanlovi parvoz vaqti optimallashtirishda g'ayrioddiy darajada katta ahamiyatga ega. Past burilish burchagiga ega kattaroq vintlarning past aylanish tezliklarida tortish kuchini yaratishda samaradorligi yuqori bo'ladi, shu sababli ular parvoz vaqtini uzaytirishga qaratilgan dronlarga idealdir. Kichikroq, yuqori burilish burchagiga ega vintlarning yuqori tezliklarda tortish kuchi yuqori bo'ladi, lekin ulardan osilish rejimida foydalanishda samaradorlik past bo'ladi. Vint xususiyatlarini vazifa talablariga moslashtirish parvoz vaqtida sezilarli yaxshilanishga olib keladi. Shuningdek, dvigatelning KV reytingi — ya'ni bir voltga to'g'ri keladigan aylanishlar soni — samaradorlikka ta'sir qiladi. Kattaroq vintlarga juftlangan past KV dvigatellari ko'pincha past aylanish tezliklarida samarali ishlaydi va shu sababli parvoz vaqtini uzaytirishda yuqori samaradorlik ko'rsatadi.
Bardoshlik bashoratlarini aniqlash uchun muhandislar tez-tez empirik sinovlarga tayanadilar. Ittifoq standlari aniq motor-propeller kombinatsiyalari uchun ittifoq, tok, kuchlanish va foydali ish ko'rsatkichi haqida batafsil o'lchovlarni beradi. Bu ma'lumotlar muhandislarga quvvat iste'moli va ittifoq chiqishi o'rtasidagi bog'liqlikni aks ettiruvchi ishlash egri chiziqlarini yaratish imkonini beradi. Drone og'irligini bilgan holda, har bir motor uchun talab qilinadigan ittifoqni aniqlash va egri chiziqdan mos keladigan quvvat qiymatini o'qish mumkin. Bu usul ishlab chiqaruvchining texnik xususiyatlari yoki oddiy parvoz o'lchovlariga tayanishga nisbatan ancha aniqroqdir.
Zamonaviy dronlar shuningdek, parvoz davomida tok, kuchlanish, gaz tayanchi pozitsiyasi va dvigatel aylanish tezligini (RPM) qayd etuvchi keng ko'lamli telemetriya jurnallarini yaratadi. Ushbu jurnallarni tahlil qilish quvvat iste'moli real sharoitda qanday o'zgarishini aniqlashga imkon beradi. Vaqt o'tishi bilan operatorlar o'zlarining aniq droni, yuklari va vazifalar turiga moslashtirilgan bashorat qiluvchi modellar yaratishlari mumkin. Ba'zi ilg'or tizimlar hozirda tarixiy ma'lumotlar, atrof-muhit parametrlari va vazifa parametrlariga asoslanib, parvoz vaqtini bashorat qilish uchun mashinada o'qitish usulidan foydalanadi.
Ushbu omillarning murakkabligiga qaramay, asosiy hisoblash ajoyib oddiy: parvoz vaqti foydali energiya miqdorini o'rtacha quvvat iste'moli bo'lganiga teng. Muammo bu ikkita qiymatni aniq aniqlashda yotibdi. Foydali energiya batareyaning kimyoviy tarkibi, harorati, yoshlanishi va chiqarish chegaralariga bog'liq. O'rtacha quvvat iste'moli esa og'irlikka, aerodinamikaga, propulsion samaradorligiga, vazifa dinamikasiga va atrof-muhit sharoitlariga bog'liq. Har bir omilni tizimli ravishda tahlil qilish orqali muhandislar juda ishonchli parvoz davomiyligi baholashlarini berishlari mumkin.
Professional faoliyatda parvoz davomiyligini baholash — bu faqatgina texnik vazifa emas, balki xavfsizlik talabi hamdir. Me'yoriy hujjatlar tez-tez dronlarga shamol o'zgarishlari yoki favqulodda qo'nish kabi kutilmagan voqealarga tayyorgarlik ko'rish uchun qo'shimcha energiya saqlashni talab qiladi. Parvoz vaqtini aniq bashorat qilish shu me'yoriy talablarga rioya qilishni ta'minlaydi va havoda quvvat yetishmasligi xavfini kamaytiradi. Xaritalash, tekshiruv va yetkazib berish kabi tijorat dasturlari uchun parvoz davomiyligi bevosita ishlab chiqarish samaradorligi va xarajatlarga iqtisodiylikni ta'sir qiladi. Agar dron bir necha daqiqa uzunroq havoda qola oladigan bo'lsa, u bir vazifada sezilarli darajada kengroq hududni qamrab olishi yoki qo'shimcha vazifalarni bajarishi mumkin.
Kelajakka qarab, batareya texnologiyasidagi yutuqlar parvoz davomiyligini hisoblashni qayta shakllantirishga intiladi. Litium-sulfur, qattiq holatdagi va yuqori silitsiyli anodli batareyalar hozirgi LiPo va litium-ion batareyalarga nisbatan yuqori energiya zichligiga ega. Vodorodli yonilgʻi elementlari va gibrid quvvat tizimlari, ayniqsa katta dronlar uchun, parvoz vaqtini uzaytirishning boshqa yoʻllarini taqdim etadi. Bu texnologiyalar yetilganda, parvoz davomiyligini hisoblash usullari ham rivojlanadi, lekin energiya va quvvatga oid asosiy tamoyillar markazda qolaveradi.
Xulosa qilib aytganda, dron uchish vaqtini hisoblash energiyaning qanday saqlanishi, o‘zgartirilishi va iste’mol qilinishini barcha jihatdan tushunishni talab qiladi. Asosiy formula oddiy bo‘lsa-da, amaliy aniqlik batareyaning ishlash xususiyatlari, propulsion samaradorligi, vazifa dinamikasi, atrof-muhit ta’siri va yuk xususiyatlarini e’tiborli ravishda hisobga olishni talab qiladi. Nazariy modellashtirishni empirik sinovlar va ma’lumotlar tahlili bilan birlashtirish orqali muhandislar dronning uchish vaqtini ishonchli tarzda bashorat qilishlari va ularni bajarishlari kerak bo‘lgan turli vazifalarga moslashtirishlari mumkin. Uzun muddatli ishlash — bu faqatgina texnik xarakteristika emas; bu dronning umumiy loyiha sifati va operatsion tayyorgarligini aks ettiradi.
