
Předpověď toho, jak dlouho bude dron zůstat ve vzduchu, se může zdát jednoduchou záležitostí čtení technického listu výrobce, avšak v praxi jde o jedno z nejnuancovanějších výpočtů v oblasti bezpilotních leteckých systémů. Doba letu není pevnou charakteristikou, nýbrž vzniká jako výsledek interakcí mezi elektrickými, mechanickými, aerodynamickými a environmentálními faktory. Inženýři, piloti i výzkumníci se všichni spoléhají na přesný odhad doby letu pro plánování misí, návrh pohonných systémů a hodnocení technologií baterií. Porozumění tomu, jak vypočítat dobu letu dronu, vyžaduje proto komplexní pohled na dron jako na systém přeměny energie, nikoli jako na soubor izolovaných komponent.
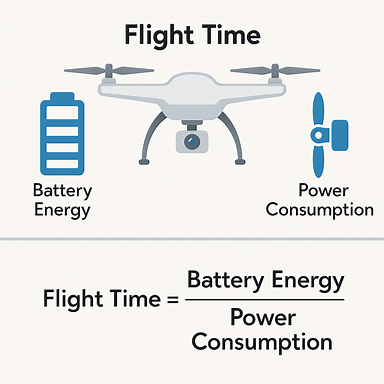
V jádru tohoto výpočtu leží vztah mezi uloženou energií a spotřeba energie baterie dronu funguje jako zásobník chemické energie, která se přeměňuje na elektrickou energii a následně na mechanický tah. Doba letu závisí na rychlosti vyčerpávání tohoto zásobníku. Ačkoli základní princip připomíná model spotřeby paliva u tradičních letadel, elektrický pohon přináší specifické vlastnosti, jako je pokles napětí, nelineární výbojové křivky a výkon závislý na teplotě. Tyto faktory činí odhad doby letu jak technicky zajímavým, tak provozně kritickým.
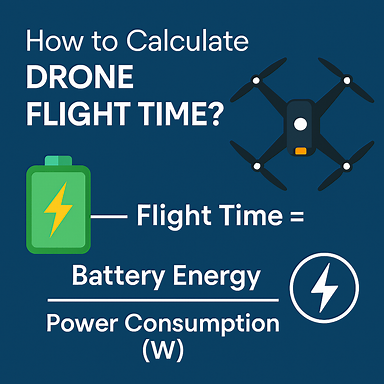
Začneme tím, že kvantifikujeme energii dostupnou v baterii dronu. Většina spotřebitelských i profesionálních dronů využívá lithiové polymerové (LiPo) nebo lithiové iontové (Li-ion) baterie, jejichž kapacity jsou obvykle udávány v miliampérhodinách. Kapacita samotná však energii neurčuje; je nutné zohlednit také napětí. Celková energie baterie je součinem její kapacity a jmenovitého napětí a vyjadřuje se ve watthodinách. Tento převod je nezbytný, protože spotřeba výkonu se měří ve watech a výdrž je nakonec poměrem watthodin k wattům. I tento převod však nedokáže plně zachytit chování v reálných podmínkách. Baterie zřídka dodají svou plnou jmenovitou kapacitu kvůli vnitřnímu odporu, stárnutí a bezpečnostním omezením minimálního napětí. Inženýři proto často pracují s „použitelnou energií“, což je snížená hodnota odrážející praktická omezení spíše než laboratorní specifikace.
Jakmile je znám dostupný výkon, zaměří se pozornost na spotřebu energie dronu. U vícerotorových platform tvoří pohonný systém převažující část celkové energetické spotřeby. Každý motor musí vyvinout dostatečný tah, aby kompenzoval hmotnost dronu, a výkon potřebný k vytvoření tohoto tahu rychle roste s nárůstem zátěže. Vztah mezi tahem a výkonem je určen aerodynamikou vrtule a účinností motoru, přičemž oba tyto parametry se mění v závislosti na otáčkách. Dron, který se udržuje ve vzduchu (hover) při pohodlné úrovni plynu, spotřebuje výrazně méně výkonu než dron pracující těsně u své maximální schopnosti vytvářet tah. Právě proto i malé zvýšení užitečného zatížení může výrazně snížit dobu letu: zatížení posouvá pohonný systém do méně účinného provozního režimu.
Výkon při vznášení se často používá jako základ pro odhad doby letu, protože představuje ustálený stav. Měřením proudu a napětí při vznášení se získá přímý odhad spotřeby výkonu. Skutečné mise však zřídka sestávají výhradně z vznášení se. Pohyb vpřed, stoupání, brzdění a manévrování všechny zatěžují motory dynamicky. Vítr přináší další proměnlivost a někdy dokonce výrazně zvyšuje spotřebu výkonu. Z tohoto důvodu jsou odhady doby letu založené výhradně na údajích z vznášení se zpravidla nadměrně optimistické. Přesnější předpovědi vyžadují pochopení toho, jak se výkon mění v průběhu celého profilu mise.
Modelování založené na letových úkolech dělí let na segmenty – vzlet, stoupání, cestovní režim, klesání a přistání – a každému segmentu přiřazuje hodnotu výkonu. Vzlet a stoupání obvykle vyžadují nejvyšší výkon, zatímco klesání může vyžadovat velmi malý výkon. Výkon v cestovním režimu závisí na rychlosti letu, aerodynamickém odporu a převodním vztlaku. U vícevrtulových dronů dochází při předním letu k mírnému snížení výkonu, protože proudění vzduchu skrz vrtule se stává efektivnějším, avšak tento přínos je často kompenzován zvýšeným odporem letounu a užitečného zatížení. Pomocí váhování jednotlivých segmentů podle jejich trvání mohou inženýři vypočítat průměrnou hodnotu výkonu, která lépe odráží provozní realitu.
Environmentální podmínky dále komplikují odhad doby letu. Hustota vzduchu klesá s nadmořskou výškou a teplotou, čímž se snižuje účinnost vrtulí a motory musí rotovat rychleji, aby udržely požadovaný tah. Chladné počasí snižuje výkon baterií zpomalením chemických reakcí, zatímco horké počasí zvyšuje tepelné zatížení motorů a elektronických regulátorů otáček. Vítr má zvláště výrazný vliv: let proti silnému čelnímu větru může zdvojnásobit spotřebu energie, zatímco let s větrem v zádech ji může snížit. Protože proměnlivost environmentálních podmínek je nevyhnutelná, výpočty doby letu často zahrnují bezpečnostní rezervu, aby dron dokázal navrátit domů i za zhoršujících se podmínek.
Dalším důležitým faktorem je stav samotné baterie. V průběhu času opakované cykly nabíjení a vybíjení degradují vnitřní chemii baterie, čímž se zvyšuje její vnitřní odpor a snižuje kapacita. Tato degradace se projevuje poklesem napětí za zatížení, což může předčasně spustit upozornění na nízké napětí a zkrátit dobu letu. Sledování stavu baterie prostřednictvím měření jejího vnitřního odporu a počtu nabíjecích cyklů umožňuje provozovatelům předvídat pokles výkonu a vyměnit baterie ještě před tím, než se stanou nepolehlivými. Pro dlouhodobé řízení flotily je sledování stárnutí baterií stejně důležité jako výpočet doby letu.
Charakteristiky nákladu ovlivňují také výdrž způsoby, které sahají dál než pouhá hmotnost. Mnoho profesionálních nákladů – například skenery LiDAR, multispektrální kamery a komunikační moduly – odebírá elektrickou energii z baterie dronu. Tuto pomocnou spotřebu je nutné přičíst k pohonnému výkonu při odhadování celkové energetické náročnosti. Náklad, který odebírá 20 wattů, se může zdát nepatrný, avšak během 30minutové mise spotřebuje 10 wattových hodin, což může snížit dobu letu o několik minut. Inženýři musí proto při výpočtu výdrže vzít v úvahu jak mechanické, tak elektrické dopady nákladu.
Výběr vrtule hraje překvapivě velkou roli při optimalizaci doby letu. Větší vrtule s nižším stoupáním mají tendenci být účinnější při generování tahu při nízkých otáčkách, což je činí ideálními pro drony zaměřené na výdrž. Menší vrtule s vysokým stoupáním vyvíjejí více tahu při vysokých rychlostech, avšak jsou méně účinné při vznášení. Přizpůsobení charakteristik vrtule požadavkům konkrétní mise může vést k výraznému zlepšení doby letu. Podobně ovlivňuje účinnost i hodnota KV motoru – počet otáček za volt. Motory s nízkou hodnotou KV spárované s velkými vrtulemi často poskytují lepší výdrž, protože pracují účinně při nižších otáčkách.
K upřesnění předpovědí výdrže se inženýři často spoléhají na empirické testování. Měřící stojany pro tah poskytují podrobná měření tahu, proudu, napětí a účinnosti pro konkrétní kombinace motoru a vrtule. Tyto údaje umožňují inženýrům sestavit křivky výkonu, které zobrazují spotřebu výkonu v závislosti na výstupním tahu. Pokud je známa hmotnost dronu, lze určit požadovaný tah na každý motor a z křivky odečíst odpovídající hodnotu výkonu. Tato metoda je mnohem přesnější než spoléhání na výrobkové specifikace výrobce nebo jednoduchá měření v režimu vznášení.
Moderní drony také generují rozsáhlé telemetrické záznamy, které zaznamenávají proud, napětí, polohu plynu a otáčky motorů během celého letu. Analýza těchto záznamů poskytuje vhled do toho, jak se spotřeba energie mění za reálných podmínek. Postupně mohou provozovatelé vytvářet prediktivní modely přizpůsobené konkrétnímu dronu, užitečnému zatížení a typu mise. Některé pokročilé systémy dokonce využívají strojové učení k předpovídání doby letu na základě historických údajů, vstupních environmentálních parametrů a parametrů mise.
Navzdory složitosti těchto faktorů zůstává základní výpočet elegantně jednoduchý: doba letu se rovná použitelné energii dělené průměrnou spotřebou výkonu. Výzvou je přesně určit obě tyto hodnoty. Použitelná energie závisí na chemii baterie, teplotě, stárnutí a mezích vybíjení. Průměrná spotřeba výkonu závisí na hmotnosti, aerodynamice, účinnosti pohonného systému, dynamice mise a podmínkách prostředí. Systematickou analýzou každého z těchto faktorů mohou inženýři vytvořit vysoce spolehlivé odhady výdrže.
V profesionálních provozních podmínkách není odhad doby letu pouhým technickým cvičením, ale bezpečnostní požadavkem. Pravidlové rámce často vyžadují, aby drony udržovaly záložní energii pro neočekávané události, jako jsou změny větru nebo nouzové přistání. Přesné předpovídání doby letu zajišťuje dodržení těchto předpisů a snižuje riziko ztráty napájení ve vzduchu. Pro komerční aplikace, jako je mapování, inspekce a doručování, má doba letu přímý dopad na produktivitu a nákladovou efektivitu. Dron, který dokáže zůstat ve vzduchu i o několik minut déle, může za jednu misi pokrýt výrazně větší plochu nebo dokončit další úkoly.
S ohledem na budoucnost slibují pokroky v oblasti technologie baterií přeformulovat výpočty výdrže. Lithium-sírové, tuhokomponentní a baterie s anodou bohatou na křemík nabízejí vyšší energetickou hustotu než současné lithiové polymerní (LiPo) a lithiové iontové (Li-ion) chemie. Vodíkové palivové články a hybridní napájecí systémy poskytují alternativní cesty ke zvýšení doby letu, zejména u velkých dronů. S postupným zrání těchto technologií se budou vyvíjet i metody používané pro výpočet výdrže, avšak základní principy energie a výkonu zůstanou nadále klíčové.
Stručně řečeno, výpočet doby letu dronu vyžaduje komplexní pochopení toho, jak je energie ukládána, přeměňována a spotřebovávána. Ačkoli základní vzorec je jednoduchý, pro dosažení přesnosti ve skutečných podmínkách je nutné pečlivě zohlednit chování baterie, účinnost pohonu, dynamiku mise, vliv prostředí i charakteristiky nákladu. Kombinací teoretického modelování s empirickým testováním a analýzou dat mohou inženýři s jistotou předpovídat dobu letu a optimalizovat drony pro širokou škálu misí, ke kterým jsou navrženy. Výdrž není pouze technickou specifikací; je to odraz celkové kvality konstrukce dronu a jeho provozní připravenosti.
