
Prever por quanto tempo um drone pode permanecer no ar pode parecer uma questão simples de consultar a folha de especificações do fabricante, mas, na prática, trata-se de um dos cálculos mais sutis no campo dos sistemas aéreos não tripulados. O tempo de voo não é uma característica fixa, mas sim um resultado emergente das interações elétricas, mecânicas, aerodinâmicas e ambientais. Engenheiros, pilotos e pesquisadores dependem todos de estimativas precisas de autonomia para planejar missões, projetar sistemas de propulsão e avaliar tecnologias de baterias. Compreender como calcular o tempo de voo de um drone exige, portanto, uma visão holística do drone como um sistema de conversão de energia, e não como um conjunto de componentes isolados.
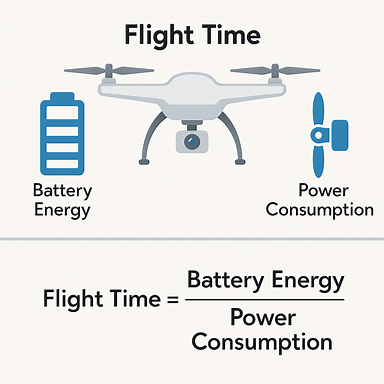
No cerne desse cálculo encontra-se a relação entre energia armazenada e consumo de energia a bateria de um drone atua como um reservatório de energia química, que é convertida em energia elétrica e, em seguida, em empuxo mecânico. A duração do voo depende da velocidade com que esse reservatório é esgotado. Embora o princípio básico se assemelhe ao modelo de consumo de combustível das aeronaves tradicionais, a propulsão elétrica introduz características únicas, tais como queda de tensão, curvas de descarga não lineares e desempenho dependente da temperatura. Esses fatores tornam a estimativa de autonomia tanto tecnicamente interessante quanto criticamente importante para a operação.
Para começar, a energia disponível em uma bateria de drone deve ser quantificada. A maioria dos drones comerciais e profissionais utiliza pacotes de lítio-polímero (LiPo) ou íon-lítio (Li-ion), cujas capacidades são normalmente expressas em miliampère-hora. Contudo, a capacidade isoladamente não determina a energia; é necessário também considerar a tensão. A energia total de uma bateria corresponde ao produto de sua capacidade pela tensão nominal, expressa em watt-hora. Essa conversão é essencial porque o consumo de potência é medido em watts e a autonomia é, em última análise, a razão entre watt-hora e watts. No entanto, mesmo essa conversão não capta integralmente o comportamento no mundo real. As baterias raramente fornecem toda a sua capacidade nominal devido à resistência interna, ao envelhecimento e aos limites de segurança relativos à tensão mínima. Como resultado, os engenheiros costumam trabalhar com a "energia utilizável", um valor reduzido que reflete restrições práticas, em vez das especificações obtidas em laboratório.
Uma vez compreendida a energia disponível, a atenção volta-se para o consumo de energia do drone. Em plataformas multirrotor, a propulsão representa a esmagadora maioria do consumo energético. Cada motor deve gerar empuxo suficiente para contrabalançar o peso do drone, e a potência necessária para produzir esse empuxo aumenta rapidamente à medida que a carga aumenta. A relação entre empuxo e potência é regida pela aerodinâmica das hélices e pela eficiência dos motores, ambas variando com a velocidade de rotação. Um drone que paira a um nível de aceleração confortável consome significativamente menos potência do que um que opera próximo à sua capacidade máxima de empuxo. É por isso que acréscimos à carga útil, mesmo pequenos, podem reduzir visivelmente o tempo de voo: eles deslocam o sistema de propulsão para uma região de operação menos eficiente.
A potência de pairar é frequentemente utilizada como referência para a estimativa de autonomia, pois representa uma condição de estado estacionário. A medição da corrente e da tensão durante o pairar fornece uma estimativa direta do consumo de potência. No entanto, missões reais raramente consistem exclusivamente em pairar. O voo em frente, a subida, a frenagem e as manobras impõem cargas dinâmicas aos motores. O vento introduz variabilidade adicional, aumentando, por vezes, drasticamente o consumo de potência. Por essa razão, os cálculos de autonomia baseados unicamente em dados de pairar tendem a ser otimistas. Previsões mais precisas exigem uma compreensão de como a potência varia ao longo de um perfil de missão.
A modelagem baseada em missão divide um voo em segmentos — decolagem, subida, cruzeiro, descida e aterrissagem — e atribui um valor de potência a cada um. A decolagem e a subida normalmente exigem a maior potência, enquanto a descida pode requerer muito pouca. A potência de cruzeiro depende da velocidade aerodinâmica, do arrasto aerodinâmico e da sustentação translacional. Os drones de múltiplos rotores experimentam uma redução moderada na potência durante o voo em frente, pois o fluxo de ar através das hélices torna-se mais eficiente, mas essa vantagem é frequentemente compensada pelo aumento do arrasto proveniente da estrutura da aeronave e da carga útil. Ao ponderar cada segmento de acordo com sua duração, os engenheiros podem calcular um valor médio de potência que reflete melhor a realidade operacional.
As condições ambientais complicam ainda mais a estimativa de autonomia. A densidade do ar diminui com a altitude e a temperatura, reduzindo a eficiência das hélices e forçando os motores a girar mais rapidamente para manter a tração. O clima frio reduz o desempenho da bateria ao retardar as reações químicas, enquanto o clima quente aumenta a tensão térmica sobre os motores e os controladores eletrônicos de velocidade. O vento exerce influência particularmente significativa: voar contra um forte vento de frente pode dobrar o consumo de energia, enquanto voar com vento de cauda pode reduzi-lo. Como a variabilidade ambiental é inevitável, os cálculos de autonomia normalmente incluem uma margem de segurança para garantir que o drone consiga retornar à base mesmo em condições que se deteriorem.
Outro fator importante é a saúde da própria bateria. Com o tempo, ciclos repetidos de carga e descarga degradam a química interna da bateria, aumentando sua resistência interna e reduzindo sua capacidade. Essa degradação se manifesta como uma queda de tensão sob carga, o que pode acionar prematuramente alertas de baixa tensão e encurtar o tempo de voo. O monitoramento da saúde da bateria por meio de medições de resistência interna e contagem de ciclos permite que os operadores antecipem a deterioração do desempenho e substituam as baterias antes que se tornem pouco confiáveis. Para a gestão de frotas a longo prazo, acompanhar o envelhecimento das baterias é tão importante quanto calcular o tempo de voo.
As características da carga útil também influenciam a autonomia de maneiras que vão além do peso. Muitas cargas úteis profissionais — como scanners LiDAR, câmeras multiespectrais e módulos de comunicação — consomem energia elétrica proveniente da bateria do drone. Esse consumo auxiliar deve ser somado ao consumo destinado à propulsão ao se estimar o uso total de energia. Uma carga útil que consome 20 watts pode parecer insignificante, mas, em uma missão de 30 minutos, consome 10 watt-hora, o que pode reduzir o tempo de voo em vários minutos. Os engenheiros devem, portanto, considerar tanto os impactos mecânicos quanto os elétricos das cargas úteis ao calcular a autonomia.
A seleção da hélice desempenha um papel surpreendentemente importante na otimização do tempo de voo. Hélices maiores com menor passo tendem a ser mais eficientes na geração de empuxo em baixas velocidades de rotação, tornando-as ideais para drones voltados à autonomia. Hélices menores e de alto passo produzem mais empuxo em altas velocidades, mas são menos eficientes no pairado. Ajustar as características da hélice às exigências da missão pode gerar melhorias substanciais no tempo de voo. Da mesma forma, a classificação KV do motor — ou seja, o número de rotações por volt — afeta a eficiência. Motores de baixo KV combinados com hélices grandes frequentemente proporcionam uma autonomia superior, pois operam de forma eficiente em rotações por minuto (RPM) mais baixas.
Para refinar as previsões de autonomia, os engenheiros frequentemente recorrem a testes empíricos. Bancadas de empuxo fornecem medições detalhadas de empuxo, corrente, tensão e eficiência para combinações específicas de motor e hélice. Esses dados permitem que os engenheiros construam curvas de desempenho que relacionam o consumo de potência à saída de empuxo. Ao conhecer o peso do drone, pode-se determinar o empuxo exigido por motor e ler, na curva correspondente, o valor de potência associado. Esse método é muito mais preciso do que confiar nas especificações do fabricante ou em medições simples de voo estacionário.
Drones modernos também geram extensos registros de telemetria que registram corrente, tensão, posição do acelerador e rotação dos motores (RPM) durante todo o voo. A análise desses registros fornece informações sobre como o consumo de energia varia em condições reais. Com o tempo, os operadores podem desenvolver modelos preditivos personalizados para seu drone específico, carga útil e tipo de missão. Alguns sistemas avançados até utilizam aprendizado de máquina para prever a duração do voo com base em dados históricos, entradas ambientais e parâmetros da missão.
Apesar da complexidade desses fatores, o cálculo fundamental permanece elegantemente simples: tempo de voo é igual à energia utilizável dividida pelo consumo médio de potência. O desafio reside na determinação precisa desses dois valores. A energia utilizável depende da química da bateria, da temperatura, do envelhecimento e dos limites de descarga. O consumo médio de potência depende do peso, da aerodinâmica, da eficiência da propulsão, da dinâmica da missão e das condições ambientais. Ao analisar sistematicamente cada fator, os engenheiros podem produzir estimativas de autonomia altamente confiáveis.
Em operações profissionais, a estimativa de autonomia não é meramente um exercício técnico, mas um requisito de segurança. Os quadros regulatórios frequentemente exigem que os drones mantenham energia de reserva para eventos inesperados, como mudanças de vento ou aterrissagens de emergência. A previsão precisa do tempo de voo garante a conformidade com essas regulamentações e reduz o risco de perda de energia em pleno voo. Para aplicações comerciais, como mapeamento, inspeção e entrega, a autonomia afeta diretamente a produtividade e a eficiência de custos. Um drone capaz de permanecer no ar mesmo alguns minutos a mais pode cobrir uma área significativamente maior ou concluir tarefas adicionais por missão.
Olhando para o futuro, os avanços na tecnologia de baterias prometem redefinir os cálculos de autonomia. As baterias de lítio-enxofre, de estado sólido e com ânodo de alto teor de silício oferecem densidades energéticas superiores às atuais químicas LiPo e Li-ion. As células a combustível de hidrogênio e os sistemas híbridos de propulsão fornecem alternativas para tempos de voo estendidos, especialmente em drones de grande porte. À medida que essas tecnologias amadurecem, os métodos utilizados para calcular a autonomia evoluirão, mas os princípios fundamentais de energia e potência permanecerão centrais.
Em resumo, calcular o tempo de voo de um drone exige uma compreensão abrangente de como a energia é armazenada, convertida e consumida. Embora a fórmula básica seja simples, a precisão no mundo real exige uma análise cuidadosa do comportamento da bateria, da eficiência da propulsão, da dinâmica da missão, das influências ambientais e das características da carga útil. Ao combinar modelagem teórica com testes empíricos e análise de dados, os engenheiros conseguem prever o tempo de voo com confiança e otimizar os drones para as diversas missões às quais foram projetados. A autonomia não é meramente uma especificação; é um reflexo da qualidade geral do projeto do drone e de sua prontidão operacional.
