
Прогнозирование того, как долго дрон может оставаться в воздухе, может показаться простой задачей — достаточно лишь взглянуть на техническую документацию производителя. Однако на практике это один из самых тонких расчётов в области беспилотных воздушных систем. Время полёта — не фиксированная характеристика, а результат сложного взаимодействия электрических, механических, аэродинамических и внешних факторов. Инженеры, пилоты и исследователи полагаются на точную оценку продолжительности автономной работы для планирования миссий, проектирования силовых установок и оценки технологий аккумуляторов. Соответственно, понимание методики расчёта времени полёта дрона требует целостного взгляда на него как на систему преобразования энергии, а не как на совокупность изолированных компонентов.
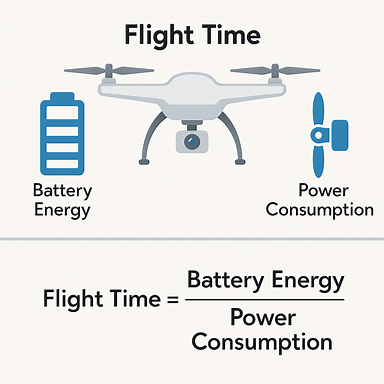
В основе данного расчёта лежит зависимость между накопленной энергии и потребление энергии аккумулятор дрона выступает в роли резервуара химической энергии, которая преобразуется в электрическую энергию, а затем — в механическую тягу. Продолжительность полёта зависит от скорости расходования этого резервуара. Хотя базовый принцип схож с моделью расхода топлива у традиционных летательных аппаратов, электрическая силовая установка вносит уникальные особенности, такие как просадка напряжения, нелинейные кривые разряда и зависимость характеристик от температуры. Эти факторы делают оценку продолжительности автономной работы как технически интересной, так и операционно критичной задачей.
Прежде всего необходимо количественно определить энергию, доступную в аккумуляторе дрона. Большинство потребительских и профессиональных дронов используют литий-полимерные (LiPo) или литий-ионные (Li-ion) аккумуляторные блоки, ёмкость которых обычно указывается в миллиампер-часах. Однако одной лишь ёмкости недостаточно для определения энергии: необходимо также учитывать напряжение. Полная энергия аккумулятора равна произведению его ёмкости на номинальное напряжение и выражается в ватт-часах. Такое преобразование является обязательным, поскольку потребляемая мощность измеряется в ваттах, а продолжительность полёта в конечном счёте представляет собой отношение ватт-часов к ваттам. Тем не менее даже это преобразование не полностью отражает поведение аккумулятора в реальных условиях. Аккумуляторы редко отдают свою полную номинальную ёмкость из-за внутреннего сопротивления, старения и ограничений по минимальному напряжению, установленных в целях безопасности. В результате инженеры зачастую оперируют «используемой энергией» — пониженным значением, которое отражает практические ограничения, а не лабораторные характеристики.
После того как становится понятен объем доступной энергии, внимание переключается на энергопотребление дрона. Для мультикоптерных платформ привод составляет подавляющую часть потребляемой энергии. Каждый двигатель должен генерировать достаточную тягу для компенсации веса дрона, а мощность, необходимая для создания этой тяги, резко возрастает по мере увеличения нагрузки. Соотношение между тягой и потребляемой мощностью определяется аэродинамикой винтов и эффективностью двигателей, обе из которых зависят от частоты вращения. Дрон, находящийся в режиме зависания при комфортном уровне управления дросселем, потребляет значительно меньше мощности, чем дрон, работающий вблизи своего максимального тягового потенциала. Именно поэтому даже небольшое увеличение полезной нагрузки может заметно сократить продолжительность полета: оно переводит систему привода в менее эффективный рабочий режим.
Мощность при зависании часто используется в качестве базового показателя для оценки продолжительности полета, поскольку она соответствует установившемуся режиму. Измерение тока и напряжения при зависании позволяет напрямую оценить потребляемую мощность. Однако реальные миссии редко состоят исключительно из режима зависания. Передний полет, набор высоты, торможение и маневрирование создают динамические нагрузки на двигатели. Ветер добавляет дополнительную изменчивость и иногда приводит к резкому увеличению потребления мощности. По этой причине расчеты продолжительности полета, основанные исключительно на данных о зависании, как правило, завышены. Более точные прогнозы требуют понимания того, как мощность изменяется в течение всего профиля миссии.
Моделирование на основе миссии разделяет полёт на сегменты — взлёт, набор высоты, крейсерский полёт, снижение и посадку — и присваивает каждому из них значение мощности. Взлёт и набор высоты обычно требуют наибольшей мощности, тогда как при снижении может потребоваться очень незначительная мощность. Мощность при крейсерском полёте зависит от воздушной скорости, аэродинамического сопротивления и трансляционной подъёмной силы. У многовинтовых БПЛА наблюдается умеренное снижение потребляемой мощности при полёте вперёд, поскольку воздушный поток через пропеллеры становится более эффективным; однако это преимущество зачастую компенсируется увеличением аэродинамического сопротивления фюзеляжа и полезной нагрузки. Взвешивая каждый сегмент пропорционально его продолжительности, инженеры могут вычислить среднее значение мощности, которое точнее отражает реальные условия эксплуатации.
Экологические условия дополнительно усложняют оценку продолжительности полета. Плотность воздуха снижается с увеличением высоты и температуры, что приводит к снижению эффективности винтов и вынуждает двигатели вращаться быстрее для поддержания тяги. Холодная погода снижает производительность аккумуляторов за счет замедления химических реакций, тогда как жаркая погода усиливает тепловую нагрузку на двигатели и электронные регуляторы скорости. Ветер оказывает особенно значительное влияние: полет против сильного встречного ветра может удвоить потребление энергии, тогда как полет по ветру может его снизить. Поскольку изменчивость окружающей среды неизбежна, при расчете продолжительности полета обычно закладывается запас безопасности, обеспечивающий возвращение БПЛА домой даже в условиях ухудшения внешних параметров.
Другим важным фактором является состояние самой батареи. Со временем повторяющиеся циклы зарядки и разрядки приводят к деградации внутренней химии батареи, увеличению внутреннего сопротивления и снижению ёмкости. Эта деградация проявляется в просадке напряжения под нагрузкой, что может привести к преждевременному срабатыванию предупреждений о низком напряжении и сокращению продолжительности полёта. Контроль состояния батареи по измерениям её внутреннего сопротивления и количеству циклов позволяет операторам прогнозировать снижение эксплуатационных характеристик и заменять батареи до того, как они станут ненадёжными. Для долгосрочного управления парком отслеживание старения батарей столь же важно, сколь и расчёт продолжительности полёта.
Характеристики полезной нагрузки также влияют на продолжительность полёта способами, выходящими за рамки её массы. Многие профессиональные полезные нагрузки — например, сканеры LiDAR, мультиспектральные камеры и модули связи — потребляют электрическую энергию от аккумулятора дрона. Этот вспомогательный расход энергии необходимо учитывать вместе с энергией, затрачиваемой на привод, при расчёте общего энергопотребления. Потребление полезной нагрузкой 20 Вт может показаться незначительным, однако за 30-минутную миссию она израсходует 10 ватт-часов, что может сократить продолжительность полёта на несколько минут. Поэтому инженерам необходимо учитывать как механическое, так и электрическое воздействие полезной нагрузки при расчёте продолжительности полёта.
Выбор пропеллера играет неожиданно важную роль в оптимизации продолжительности полёта. Более крупные пропеллеры с меньшим шагом, как правило, обеспечивают более высокую эффективность создания тяги при низких частотах вращения, что делает их идеальными для беспилотных летательных аппаратов, ориентированных на максимальное время автономной работы. Меньшие пропеллеры с большим шагом создают большую тягу на высоких скоростях, однако менее эффективны при зависании. Согласование характеристик пропеллера с требованиями к миссии может обеспечить значительное увеличение продолжительности полёта. Аналогичным образом показатель KV двигателя — число оборотов на вольт — влияет на его эффективность. Двигатели с низким значением KV в паре с крупными пропеллерами зачастую обеспечивают превосходную автономность, поскольку работают наиболее эффективно при более низких частотах вращения.
Для уточнения прогнозов продолжительности полёта инженеры часто полагаются на эмпирические испытания. Стенды для измерения тяги обеспечивают детальные замеры тяги, тока, напряжения и КПД для конкретных комбинаций двигателя и пропеллера. Эти данные позволяют инженерам построить кривые производительности, отражающие зависимость потребляемой мощности от развиваемой тяги. Зная массу дрона, можно определить требуемую тягу на каждый двигатель и с помощью кривой найти соответствующее значение потребляемой мощности. Этот метод значительно точнее, чем опора на технические характеристики производителя или простые измерения при зависании.
Современные дроны также генерируют обширные телеметрические журналы, в которых фиксируются значения тока, напряжения, положения дросселя и частоты вращения двигателей на протяжении всего полёта. Анализ таких журналов позволяет понять, как потребление энергии изменяется в реальных условиях. Со временем операторы могут создавать предиктивные модели, адаптированные под конкретный дрон, полезную нагрузку и тип миссии. Некоторые передовые системы даже используют машинное обучение для прогнозирования продолжительности полёта на основе исторических данных, параметров окружающей среды и характеристик миссии.
Несмотря на сложность этих факторов, базовый расчёт остаётся изящно простым: время полёта равно доступной энергии, делённой на среднее энергопотребление. Сложность заключается в точном определении этих двух величин. Доступная энергия зависит от химического состава аккумулятора, температуры, степени старения и пределов разряда. Среднее энергопотребление зависит от массы, аэродинамики, эффективности силовой установки, динамики миссии и условий окружающей среды. Проводя системный анализ каждого из этих факторов, инженеры могут получать весьма надёжные оценки продолжительности автономной работы.
В профессиональных операциях оценка продолжительности полета — это не просто техническая задача, а требование безопасности. Регуляторные нормы зачастую предписывают беспилотным летательным аппаратам сохранять резерв энергии на случай непредвиденных ситуаций, таких как изменение ветра или аварийная посадка. Точное прогнозирование продолжительности полета обеспечивает соблюдение этих требований и снижает риск потери питания в воздухе. Для коммерческих применений — например, картографирования, инспекции и доставки — продолжительность полета напрямую влияет на производительность и экономическую эффективность. Беспилотный летательный аппарат, способный оставаться в воздухе даже на несколько минут дольше, может охватить значительно большую площадь или выполнить дополнительные задачи в рамках одной миссии.
В перспективе достижения в области технологий аккумуляторов позволят кардинально изменить методы расчёта продолжительности полёта. Аккумуляторы на основе лития и серы, твёрдотельные аккумуляторы и аккумуляторы с анодами на основе высококремниевых материалов обладают более высокой удельной энергоёмкостью по сравнению с современными литий-полимерными (LiPo) и литий-ионными (Li-ion) аккумуляторами. Водородные топливные элементы и гибридные силовые системы предлагают альтернативные пути увеличения продолжительности полёта, особенно для крупногабаритных БПЛА. По мере созревания этих технологий методы расчёта продолжительности полёта будут эволюционировать, однако базовые принципы, связанные с энергией и мощностью, останутся центральными.
В заключение, расчет времени полета дрона требует всестороннего понимания того, как энергия накапливается, преобразуется и расходуется. Хотя базовая формула проста, для достижения точности в реальных условиях необходимо тщательно учитывать поведение аккумулятора, эффективность силовой установки, динамику миссии, влияние окружающей среды и характеристики полезной нагрузки. Комбинируя теоретическое моделирование с эмпирическими испытаниями и анализом данных, инженеры могут с высокой степенью достоверности прогнозировать продолжительность полета и оптимизировать дроны для выполнения самых разнообразных задач, для которых они предназначены. Продолжительность полета — это не просто техническая характеристика; она отражает общее качество конструкции дрона и его готовность к эксплуатации.
