
Прогнозування тривалості польоту дрона в повітрі може здатися простим завданням — достатньо ознайомитися з технічними характеристиками, наведеними виробником у специфікації, проте насправді це одна з найбільш тонких і багатогранних розрахункових задач у галузі безпілотних авіаційних систем. Тривалість польоту не є постійною характеристикою, а є результатом складної взаємодії електричних, механічних, аеродинамічних та навколишніх факторів. Інженери, пілоти та дослідники спираються на точну оцінку тривалості польоту для планування місій, проектування систем тяги та оцінки технологій акумуляторів. Отже, розуміння того, як обчислити тривалість польоту дрона, вимагає цілісного погляду на дрон як на систему перетворення енергії, а не як на набір ізольованих компонентів.
У центрі цього розрахунку лежить зв’язок між запасеною енергією та споживана потужність акумулятор дрона виступає резервуаром хімічної енергії, яка перетворюється на електричну енергію, а потім — на механічну тягу. Тривалість польоту залежить від швидкості, з якою цей резервуар вичерпується. Хоча базовий принцип нагадує модель споживання палива традиційних літальних апаратів, електропривід має унікальні характеристики, такі як просідання напруги, нелінійні криві розряду та продуктивність, що залежить від температури. Ці фактори роблять оцінку тривалості польоту як технічно цікавою, так і операційно критичною.
По-перше, необхідно визначити кількість енергії, доступної в акумуляторі дрона. Більшість побутових і професійних дронів використовують акумуляторні батареї з літій-полімерним (LiPo) або літій-іонним (Li-ion) електролітом, ємність яких зазвичай вказується в міліампер-годинах. Однак сама ємність не визначає кількість енергії: також необхідно враховувати напругу. Загальна енергія акумулятора — це добуток його ємності та номінальної напруги, виражений у ват-годинах. Цей перерахунок є обов’язковим, оскільки споживання потужності вимірюється у ватах, а тривалість польоту в кінцевому підсумку визначається як відношення ват-годин до ватів. Проте навіть цей перерахунок не повністю відображає реальну поведінку в умовах експлуатації. Акумулятори рідко віддають повну номінальну ємність через внутрішній опір, старіння та обмеження щодо мінімально допустимої напруги, встановлені з міркувань безпеки. Тому інженери часто оперують поняттям «корисної енергії» — зниженої величини, яка відображає практичні обмеження, а не лабораторні специфікації.
Після того як визначено доступну енергію, увагу зосереджують на споживанні енергії дроном. Для багатороторних платформ привід забирає переважну більшість енергії. Кожен двигун має генерувати достатню тягу, щоб компенсувати вагу дрона, а потужність, необхідна для створення цієї тяги, швидко зростає зі збільшенням навантаження. Залежність між тягою та потужністю визначається аеродинамікою гвинтів і ефективністю двигунів, обидва параметри яких змінюються зі зміною частоти обертання. Дрон, що зависає при комфортному рівні керування дроселем, споживає значно менше потужності, ніж дрон, що працює поблизу своєї максимальної тягової здатності. Саме тому навіть невелике збільшення вантажопідйомності може помітно скоротити тривалість польоту: воно переводить систему приводу в режим роботи з нижчою ефективністю.
Потужність у режимі зависання часто використовується як базовий показник для оцінки тривалості польоту, оскільки вона відображає умови сталого стану. Вимірювання струму та напруги у режимі зависання дає безпосередню оцінку споживаної потужності. Однак реальні місії рідко складаються лише з чистого зависання. Передній політ, набір висоти, гальмування та маневрування створюють динамічні навантаження на двигуни. Вітер додає додаткової змінності й іноді значно збільшує споживання потужності. Саме тому розрахунки тривалості польоту, засновані виключно на даних про режим зависання, зазвичай є надто оптимістичними. Більш точні прогнози вимагають розуміння того, як потужність змінюється протягом усього профілю місії.
Моделювання на основі місії поділяє польоти на сегменти — зліт, набір висоти, крейсерський політ, зниження та посадку — й призначає кожному з них значення потужності. Зліт і набір висоти зазвичай вимагають найбільшої потужності, тоді як для зниження може знадобитися дуже незначна потужність. Потужність у крейсерському режимі залежить від швидкості польоту, аеродинамічного опору та трансляційної підйомної сили. Багатороторні дрони відчувають помірне зниження споживаної потужності під час переднього польоту, оскільки повітряний потік через пропелери стає ефективнішим, проте ця перевага часто компенсується зростанням опору з боку планера та вантажу. Враховуючи тривалість кожного сегмента, інженери можуть обчислити середнє значення потужності, що точніше відображає реальні умови експлуатації.
Екологічні умови ще більше ускладнюють оцінку тривалості польоту. Щільність повітря зменшується з підвищенням над рівнем моря та зростанням температури, що знижує ефективність гвинтів і змушує двигуни обертатися швидше для підтримки необхідної тяги. Холодна погода знижує продуктивність акумуляторів через уповільнення хімічних реакцій, тоді як спекотна погода посилює теплове навантаження на двигуни та електронні регулятори швидкості. Вітер має особливо суттєвий вплив: польот проти сильного фронтального вітру може подвоїти споживання потужності, тоді як польот за вітром може його зменшити. Оскільки екологічна змінність є неминучою, розрахунки тривалості польоту часто передбачають запас безпеки, щоб забезпечити повернення дрона додому навіть за погіршення умов.
Іншим важливим чинником є стан акумулятора. З часом повторні цикли заряджання-розряджання призводять до деградації внутрішньої хімії акумулятора, збільшуючи опір і зменшуючи ємність. Ця деградація проявляється у просадці напруги під навантаженням, що може призвести до передчасного спрацювання попереджень про низьку напругу та скорочення тривалості польоту. Моніторинг стану акумулятора за допомогою вимірювань внутрішнього опору та підрахунку циклів дозволяє операторам передбачати зниження продуктивності й замінювати акумулятори до того, як вони стануть ненадійними. Для управління автопарком у довгостроковій перспективі відстеження старіння акумуляторів є не менш важливим, ніж розрахунок тривалості польоту.
Характеристики вантажу також впливають на тривалість польоту способами, що виходять за межі його маси. Багато професійних вантажів — наприклад, сканери LiDAR, багатоспектральні камери та модулі зв’язку — живляться електричною енергією від акумулятора дрону. Це додаткове енергоспоживання слід враховувати разом із енергією, необхідною для руху, при оцінці загального енерговитрат. Вантаж, що споживає 20 ват, може здаватися незначним, однак протягом 30-хвилинної місії він витрачає 10 ват-годин, що може скоротити тривалість польоту на кілька хвилин. Отже, інженери повинні враховувати як механічний, так і електричний вплив вантажів при розрахунку тривалості польоту.
Вибір гвинта відіграє несподівано велику роль у оптимізації тривалості польоту. Більші гвинти з меншим кроком, як правило, ефективніше створюють тягу при низьких обертових швидкостях, що робить їх ідеальними для дронів, орієнтованих на тривалий час польоту. Менші гвинти з великим кроком створюють більшу тягу на високих швидкостях, але є менш ефективними під час зависання. Узгодження характеристик гвинта з вимогами до місії може значно покращити тривалість польоту. Аналогічно, показник KV двигуна — кількість обертів на вольт — впливає на ефективність. Двигуни з низьким показником KV у поєднанні з великими гвинтами часто забезпечують кращу автономність, оскільки працюють ефективно при нижчих обертах.
Щоб уточнити прогнози тривалості роботи, інженери часто спираються на емпіричне тестування. Стенди для вимірювання тяги забезпечують детальні показники тяги, струму, напруги та ККД для конкретних комбінацій двигун–пропелер. Ці дані дозволяють інженерам побудувати криві продуктивності, що відображають залежність споживаної потужності від виробленої тяги. Знаючи вагу дрона, можна визначити необхідну тягу на кожен двигун і за кривою знайти відповідне значення потужності. Цей метод набагато точніший, ніж спирається лише на технічні специфікації виробника або прості вимірювання під час зависання.
Сучасні дрони також генерують розширені телеметричні журнали, які фіксують поточне значення струму, напруги, положення дросельної заслінки та обертів двигунів протягом усього польоту. Аналіз цих журналів дає уявлення про те, як споживання енергії змінюється в реальних умовах. З часом оператори можуть створювати прогнозні моделі, адаптовані до конкретного дрона, вантажу та типу місії. Деякі передові системи навіть використовують машинне навчання для прогнозування тривалості польоту на основі історичних даних, параметрів навколишнього середовища та характеристик місії.
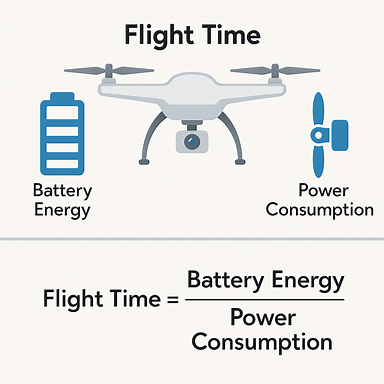
Незважаючи на складність цих чинників, базовий розрахунок залишається вражаюче простим: тривалість польоту дорівнює корисній енергії, поділеній на середнє споживання потужності. Складність полягає у точному визначенні цих двох значень. Корисна енергія залежить від хімічного складу акумулятора, температури, старіння та меж розряду. Середнє споживання потужності залежить від маси, аеродинаміки, ефективності системи тяги, динаміки завдання та умов навколишнього середовища. Шляхом системного аналізу кожного чинника інженери можуть отримувати надійні оцінки тривалості роботи.
У професійних операціях оцінка тривалості польоту — це не просто технічне завдання, а вимога безпеки. Регуляторні норми часто передбачають, що дрони мають зберігати резерв енергії на випадок непередбачених подій, таких як зміна напрямку вітру або аварійна посадка. Точне прогнозування часу польоту забезпечує відповідність цим вимогам та зменшує ризик втрати живлення в повітрі. Для комерційного застосування — наприклад, у сфері картографування, інспектування та доставки — тривалість польоту безпосередньо впливає на продуктивність і економічну ефективність. Дрон, який може залишатися в повітрі навіть на кілька хвилин довше, зможе охопити значно більшу територію або виконати додаткові завдання протягом однієї місії.
Дивлячись у майбутнє, досягнення в галузі акумуляторних технологій обіцяють змінити підхід до розрахунку тривалості польоту. Акумулятори на основі літій-сірки, твердотільних елементів та анодів із високим вмістом кремнію мають більшу енергетичну ємність порівняно з нинішніми хімічними системами LiPo та Li-ion. Водневі паливні елементи й гібридні енергетичні системи забезпечують альтернативні шляхи збільшення тривалості польоту, особливо для великих дронів. По мірі зрілості цих технологій методи розрахунку тривалості польоту також будуть еволюціонувати, однак базові принципи енергії та потужності залишатимуться ключовими.
Підсумовуючи, розрахунок часу польоту дрону вимагає комплексного розуміння того, як енергія зберігається, перетворюється та споживається. Хоча базова формула є простою, для досягнення практичної точності необхідно уважно враховувати поведінку акумулятора, ефективність системи тяги, динаміку завдання, вплив навколишнього середовища та характеристики вантажу. Поєднуючи теоретичне моделювання з емпіричними випробуваннями та аналізом даних, інженери можуть із впевненістю прогнозувати тривалість польоту й оптимізувати дрони для виконання різноманітних завдань, для яких вони призначені. Тривалість польоту — це не просто технічна характеристика; вона відображає загальну якість конструкції дрона та його готовність до експлуатації.
