
Дронның әуеде қанша уақыт болатынын болжау өндірушінің техникалық сипаттамасын оқуға ұқсас қарапайым іс-шара болып көрінуі мүмкін, бірақ практикада бұл ұшқышсыз аэродинамикалық жүйелер саласындағы ең терең есептеулердің бірі болып табылады. Ұшу уақыты тұрақты сипаттама емес, бірақ электрлік, механикалық, аэродинамикалық және экологиялық әсерлердің өзара әрекеттесуінен пайда болатын нәтиже. Инженерлер, пилоттар және зерттеушілер барлығы миссияларды жоспарлау, қозғалтқыш жүйелерін жобалау және аккумуляторлық технологияларды бағалау үшін дәлдігі жоғары шыдамдылық бағалауына сүйенеді. Сондықтан дронның ұшу уақытын есептеуді түсіну — бұл дронды жеке компоненттер жиынтығы ретінде емес, энергия айналымы жүйесі ретінде тұтас қарау қажеттілігін білдіреді.
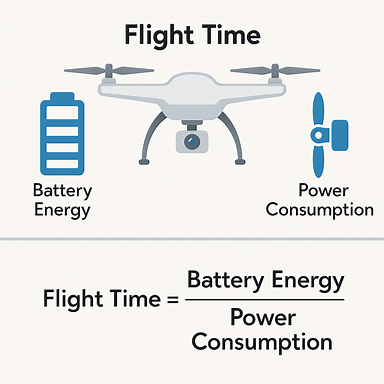
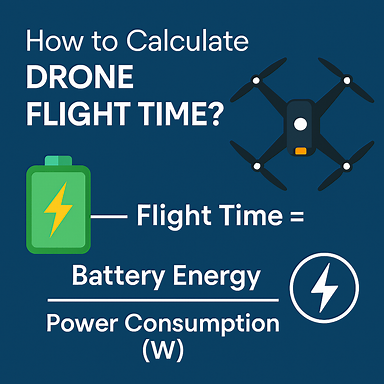
Есептеудің негізінде мынадай қатынас жатыр: сақталған энергия және энергия тұтыну дронның аккумуляторы химиялық энергияның сақталу орны ретінде қызмет етеді, ол электрлік энергияға, одан әрі механикалық итерілуге айналады. Ұшу ұзақтығы бұл сақталу орны қаншалықты тез таусылатынына байланысты. Негізгі принцип әдеттегі ұшақтардың отын тұтыну моделіне ұқсас болса да, электрлік қозғалтқыш кернеудің төмендеуі, сызықты емес разрядталу қисықтары және температураға байланысты өнімділік сияқты ерекше сипаттамаларды енгізеді. Бұл факторлар ұшу ұзақтығын бағалауды әрі техникалық тұрғыдан қызықты, әрі операциялық тұрғыдан маңызды етеді.
Бастау үшін, дронның аккумуляторындағы қолжетімді энергияны сандық түрде анықтау қажет. Көптеген тұтыну және кәсіби дрондар литий-полимерлі (LiPo) немесе литий-ионды (Li-ion) аккумуляторларды пайдаланады, олардың сыйымдылығы әдетте миллиампер-сағатпен көрсетіледі. Дегенмен, тек қана сыйымдылық энергияны анықтамайды; сонымен қатар кернеуді де ескеру қажет. Аккумулятордың жалпы энергиясы — оның сыйымдылығы мен номиналды кернеуінің көбейтіндісі болып табылады және ватт-сағатпен өрнектеледі. Бұл түрлендіру маңызды, себебі қуаттың тұтынул қуаты ваттпен өлшенеді, ал ұзақтығы — соңында ватт-сағаттың ваттқа қатынасы болып табылады. Дегенмен, бұл түрлендіру де шынайы әлемдегі әрекетті толықтай сипаттамайды. Аккумуляторлар ішкі кедергісі, уақыт өтуімен өзгеруі және минималды кернеуге қойылатын қауіпсіздік шектері салдарынан өзінің ресми көрсетілген сыйымдылығының толық мөлшерін бермейді. Сондықтан инженерлер көбінесе «пайдаланылатын энергия» деген түсінікті қолданады — бұл лабораториялық сипаттамалар емес, практикалық шектеулерді көрсететін төмендетілген мән.
Қолжетімді энергия мөлшері анықталғаннан кейін назар дронның қуаттылығын тұтынуына аударылады. Көпроторлы платформалар үшін қозғалтқыш жүйесі энергияның негізгі бөлігін тұтынады. Әрбір қозғалтқыш дронның салмағын теңестіру үшін жеткілікті итеру күшін қамтамасыз етуі тиіс, ал бұл итеру күшін өндіруге қажетті қуат жүктеме артқан сайын тез өседі. Итеру күші мен қуат арасындағы қатынас желектің аэродинамикасы мен қозғалтқыштың пайдалы әсер коэффициенті арқылы анықталады; олардың екеуі де айналу жылдамдығына байланысты өзгереді. Тығыз тарту деңгейінде (комфортты газ деңгейінде) парящы дрон өзінің максималды итеру қабілетіне жақын жұмыс істейтін дронға қарағанда әлдеқайда аз қуат тұтынады. Осы себепті тіпті аз болса да жүк қосымшалары ұшу уақытын айтарлықтай қысқартуы мүмкін: олар қозғалтқыш жүйесін азырақ тиімді жұмыс аймағына ығысады.
Ұшу қуатын бағалаудың негізгі көрсеткіші ретінде жиі ұшып тұру қуаты қолданылады, себебі ол тұрақты күйді көрсетеді. Ұшып тұру кезіндегі ток пен кернеуді өлшеу қуаттың тұтылуын тікелей бағалауға мүмкіндік береді. Дегенмен, шынайы миссияларда таза ұшып тұру сирек кездеседі. Алға ұшу, көтерілу, тежеу және маневрлеу барлығы да қозғалтқыштарға динамикалық жүктеме тудырады. Жел қосымша айнымалылық енгізеді және кейде қуаттың тұтылуын қатты арттырады. Осы себепті тек ұшып тұру деректеріне негізделген ұшу ұзақтығын бағалау әдетте оптимистикалық болып табылады. Дәлірек болжамдар алу үшін қуаттың миссия профилі бойынша қалай тербелетінін түсіну қажет.
Миссияға негізделген модельдеу ұшуын кезеңдерге—көтерілу, ұшуға көтерілу, крейсерлік ұшу, түсу және қону—бөледі және әрбір кезеңге қуат мәнін тағайындайды. Көтерілу мен ұшуға көтерілу әдетте ең жоғары қуатты талап етеді, ал түсу кезінде қуаттың аз болуы мүмкін. Крейсерлік ұшудағы қуат ауа жылдамдығына, аэродинамикалық кедергіге және трансляциялық көтеруші күшке тәуелді. Көпроторлы дрондар алға қарай ұшқанда қуаттың қатты емес төмендеуін бақылайды, себебі желдеткіштер арқылы ауа ағысы тиімдірек болады, бірақ бұл артықшылық жиі дронның корпусы мен жүктемесінен туындайтын кедергінің өсуімен теңестіріледі. Әрбір кезеңді оның ұзақтығы бойынша салмақтандырып, инженерлер операциялық шындықты нақтырақ көрсететін орташа қуат мәнін есептей алады.
Қоршаған орта жағдайлары да ұзақтықты бағалауды күрделендіреді. Ауа тығыздығы биіктік пен температураның өсуіне байланысты төмендейді, бұл айналдырғыштың тиімділігін азайтады және тартылыс күшін сақтау үшін қозғалтқыштардың айналу жиілігін көтеруге мәжбүр етеді. Суық ауа-райы химиялық реакциялардың баяулауына байланысты аккумулятордың жұмыс істеу сапасын төмендетеді, ал ыстық ауа-райы қозғалтқыштар мен электрондық жылдамдық реттегіштерге жылулық кернеу тудырады. Жел әсіресе әсерлі болады: күшті қарсы желге қарсы ұшу энергия тұтынуын екі есе арттыруы мүмкін, ал артқы желге ұшу оны азайтуы мүмкін. Қоршаған ортаның әртүрлілігін болдырмауға болмайтындықтан, ұзақтықты есептеулерде дрон қолайсыз жағдайларда да үйіне қайта алатындай етіп қауіпсіздік шегі қосылады.
Басқа маңызды фактор — аккумулятордың өзінің жағдайы. Уақыт өте келе, қайталанатын зарядтау-разрядтау циклдары аккумулятордың ішкі химиялық құрамын тозықтырады, оның ішкі кедергісін арттырады және сыйымдылығын төмендетеді. Бұл тозу жүктеме кезіндегі кернеудің төмендеуі түрінде көрінеді, бұл төмен кернеу туралы ескертуді уақытынан бұрын іске қосып, ұшу уақытын қысқартуы мүмкін. Аккумулятордың жағдайын ішкі кедергі өлшемдері мен циклдар саны арқылы бақылау операторларға өнімділіктің төмендеуін алдын ала болжап, аккумуляторларды олар сенімсіз болғанға дейін ауыстыруға мүмкіндік береді. Ұзақ мерзімді парк басқаруы үшін аккумулятордың старение процесін бақылау ұшу уақытын есептеумен тең маңызды.
Жүк сипаттамалары да ұшу ұзақтығына салмақтан тыс жағдайларда әсер етеді. Көптеген кәсіби жүктер — мысалы, LiDAR сканерлері, көпспектрлі камералар және байланыс модульдері — дронның аккумуляторынан электр қуатын тартады. Бұл қосымша энергия тұтынуын жалпы энергия шығынын бағалаған кезде қозғалтқыш қуатына қосу керек. 20 Вт қуат тартатын жүк әдетте елеусіз болып көрінсе де, 30 минуттық миссия кезінде ол 10 Вт·сағ энергия тұтынады, бұл ұшу уақытын бірнеше минутқа қысқартуы мүмкін. Сондықтан инженерлер ұшу ұзақтығын есептеген кезде жүктердің механикалық және электрлік әсерлерін ескеруі тиіс.
Қанаттарды таңдау ұшу уақытын оптимизациялауда қатты әсер етеді. Төмен қадамды, үлкен қанаттар төмен айналу жиілігінде тарту күшін тудыруда тиімдірек болып табылады, сондықтан олар ұзақ мерзімді ұшуға бағытталған дрондар үшін идеалды болып табылады. Кішірек, биік қадамды қанаттар жоғары жылдамдықта көбірек тарту күшін береді, бірақ тұрып ұшуда аз тиімді. Қанаттардың сипаттамаларын миссия талаптарына сәйкестендіру ұшу уақытын қатты жақсартуға мүмкіндік береді. Сол сияқты, қозғалтқыштың KV рейтингі — бір вольтқа келетін айналым саны — да тиімділікке әсер етеді. Үлкен қанаттармен жұптасқан төмен KV-ті қозғалтқыштар жиілігі төмен RPM-де тиімді жұмыс істейді, сондықтан олар ұзақ мерзімді ұшу көрсеткіштерін жақсартады.
Төзімділік болжамдарын нақтылау үшін инженерлер жиі эмпирикалық сынақтарға сүйенеді. Итеру тірегі (траст-стенд) белгілі бір электрқозғалтқыш-қанатша комбинациялары үшін итеру күшін, ток күшін, кернеуді және пайдалы әсер коэффициентін қатты нақты өлшеулер береді. Бұл деректер инженерлерге қуаттың шығыны мен итеру күшінің шығысы арасындағы тәуелділікті көрсететін өнімділік қисықтарын құруға мүмкіндік береді. Дронның салмағы белгілі болса, әрбір электрқозғалтқышқа қажетті итеру күшін анықтауға және сәйкес қуат мәнін қисықтан оқуға болады. Бұл әдіс өндірушінің техникалық сипаттамаларына немесе қарапайым парықтау өлшеулеріне сүйенуге қарағанда әлдеқайда дәлірек.
Қазіргі заманғы дрондар ұшу кезінде ток, кернеу, газдың орны және двигателдің айналу жиілігін (RPM) қоса алғанда, кең көлемді телеметриялық журналдар да құрады. Бұл журналдарды талдау қуаттың шынайы жағдайларда қалай өзгеретіні туралы түсінік береді. Уақыт өте келе операторлар өздерінің нақты дрондарына, жүктемесіне және миссия типіне сәйкес болжамдық модельдер құра алады. Кейбір ілгері деңгейдегі жүйелер тарихи деректерге, айналадағы орта параметрлеріне және миссия параметрлеріне негізделген ұшу уақытын болжау үшін машиналық оқыту әдістерін пайдаланады.
Бұл факторлардың күрделілігіне қарамастан, негізгі есептеу әдісі әдемі түрде қарапайым болып қалады: ұшу уақыты = пайдаланылатын энергия / орташа қуаттың тұтынул қарқыны. Қиындық осы екі мәнді дәл анықтауда жатыр. Пайдаланылатын энергия батареяның химиялық құрамына, температураға, уақыт өтуіне (жасыруға) және разрядтау шектеріне тәуелді. Орташа қуаттың тұтынул қарқыны салмаққа, аэродинамикаға, қозғалтқыштың пайдалы әсер коэффициентіне, миссия динамикасына және айналадағы ортаның жағдайларына тәуелді. Әрбір факторды жүйелі түрде талдау арқылы инженерлер ұзақтығы бойынша өте сенімді бағалаулар ала алады.
Кәсіби операцияларда шыдамдылықты бағалау — бұл тек қана техникалық жаттығу емес, сонымен қатар қауіпсіздік талабы болып табылады. Реттеуші нормалар жиі ұшақтарды желдің өзгеруі немесе авариялық қону сияқты күтпеген оқиғаларға қосымша энергия қорын сақтауға мәжбүрлейді. Ұшу уақытын дәл болжау осы нормаларға сәйкестікті қамтамасыз етеді және ауада қуаттың қолайсыз жоғалу қаупін азайтады. Карталау, тексеру және жеткізу сияқты коммерциялық қолданыстар үшін шыдамдылық тікелей өнімділік пен шығындардың тиімділігіне әсер етеді. Бірнеше минутқа ғана ұзағырақ ауада ұшатын дрон бір миссия кезінде маңызды түрде көбірек аумақты қамтуға немесе қосымша тапсырмаларды орындауға мүмкіндік береді.
Алдағы уақытта аккумуляторлық технологиялардағы жетістіктер ұзақтық есептеулерін қайта пішіндеуге мүмкіндік береді. Литий-күкірт, қатты күйдегі және жоғары кремнийлі анодты аккумуляторлар қазіргі LiPo және литий-ионды химиялық құрамдарға қарағанда жоғары энергия тығыздығын ұсынады. Сутегі отын элементтері мен гибридтік қуат жүйелері әсіресе ірі дрондар үшін ұзақ ұшу уақытына альтернативті жолдарды қамтамасыз етеді. Бұл технологиялар жетілген сайын ұзақтықты есептеу әдістері де дамып, бірақ энергия мен қуаттың негізгі принциптері орталықта сақталып қалады.
Қорытындылай келгенде, дронның ұшу уақытын есептеу үшін энергия қалай сақталатынын, түрлендірілетінін және тұтырылатынын толық түсіну қажет. Негізгі формула қарапайым болса да, шынайы әлемдегі дәлдік батареяның жұмыс істеу ерекшеліктерін, қозғалтқыштың пайдалы әсер коэффициентін, миссия динамикасын, айналадағы ортаның әсерін және жүктеменің сипаттамаларын мұқият ескеруді талап етеді. Теориялық модельдеуді эмпирикалық сынақтар мен деректерді талдаумен ұштастыра отырып, инженерлер дрондардың ұшу уақытын сенімді түрде болжай алады және оларды орындауға арналған әртүрлі миссиялар үшін оптимизациялай алады. Төзімділік — бұл тек техникалық сипаттама емес; бұл дронның жалпы конструкциялық сапасы мен операциялық дайындығын көрсететін көрсеткіш.
