
Drone lennuaegu prognoosimine võib esmapilgul tunduda lihtne ülesanne, kus piisab tootja tehnilistest andmetest, kuid praktikas on see üks keerukamaid arvutusi lennukite juhtimise valdkonnas. Lennuaeg ei ole fikseeritud omadus, vaid tekib elektriliste, mehaaniliste, aerodünaamiliste ja keskkonnategurite koostoime tulemusena. Insenerid, piloodid ja teadusuuringute tegijad toetuvad täpsetele vastupidavuse hindamistele missioonide planeerimisel, propulssioonisüsteemide projekteerimisel ja akutehnoloogiate hindamisel. Seega nõuab drone lennuaegu arvutamise mõistmine drone’i vaatlemist kui energiamuundumissüsteemi, mitte eraldatud komponentide kogumit.
Arvutuse südamiks on seos salvestatud energia ja energiatarve drone aku toimib keemilise energia reservuaarina, mida teisendatakse elektrienergiaks ja seejärel mehaaniliseks tõukejõuks. Lennu kestus sõltub selle reservuaari tühi- ja täitumiskiirusest. Kuigi põhimõte meenutab traditsiooniliste lennukite kütusekulu mudelit, seab elektriline propulssioon endaga kaasa eripäraseid omadusi, näiteks pinge languse, mittelineaarsed laadimisjooned ja temperatuurist sõltuv jõudlus. Need tegurid muudavad lennueelduse kindlaksmääramise nii tehniliselt huvitavaks kui ka operatsiooniliselt kriitiliseks.
Esimesena tuleb kvantifitseerida lennukis kasutatava aku energiakogus. Enamik tarbijatele ja professionaalsetele lennukitele kasutatavad litium-polümeer (LiPo) või litium-ioon (Li-ion) akupakkumised on tavaliselt märgitud milliampr-tundides. Siiski ei määra üksnes mahutavus energiat; tuleb arvesse võtta ka pinge. Akus olev koguenergia on selle mahutavuse ja nimipingega korrutis, mida väljendatakse vatt-tundides. See teisendus on oluline, kuna võimsustarve mõõdetakse vattides ja lennuaeg on lõppkokkuvõttes vatt-tundide suhe vattidesse. Siiski ei pruugi isegi see teisendus täielikult kajastada reaalseid tingimusi. Akud ei anna oma täielikku märgistatud mahutavust sageli seetõttu, et nende sisemine takistus, vananemine ja minimaalse pingelimiidi ohutuspiirangud seda takistavad. Seetõttu kasutavad insenerid sageli „kasutatavat energiat“, mis on vähendatud väärtus ja kajastab praktilisi piiranguid pigem kui laboritingimustes saadud spetsifikatsioone.
Kui saadaval olev energiahulk on teada, pööratakse tähelepanu lennukõrgusega lennukite (drone’ide) võimsustarbele. Mitme mootoriga platvormidel moodustab propulssioon ülekaalukas osa energiatarbest. Iga mootor peab genereerima piisavalt tõstejõudu, et kompenseerida lennukõrgusega lennuki kaalu, ja selle tõstejõu tootmiseks vajalik võimsus suureneb kiiresti koormuse kasvades. Tõstejõu ja võimsuse vahelist seost määravad propelleri aerodünaamika ja mootori tõhusus, mõlemad muutuvad pöörlemiskiirusega. Lennukõrgusega lennuk, mis on stabiilselt kõrgel (hovering), tarbib oluliselt vähem võimsust kui lennuk, mis töötab oma maksimaalse tõstejõu piiril. Seepärast võivad isegi väikesed lisakoormad märgatavalt vähendada lendamisaega: nad sunnivad propulssioonisüsteemi töötama vähem tõhusas tööpiirkonnas.
Kõrgusel paigutumise võimsust kasutatakse sageli vastupidavuse hindamise alusena, kuna see esindab stabiilset olekut. Kõrgusel paigutumise voolu ja pinge mõõtmine annab otsese hinnangu võimsustarbimisele. Siiski koosnevad tegelikud missioonid harva ainult kõrgusel paigutumisest. Edasiliikumine, tõus, pidurdamine ja manööverdamine koormavad mootoreid dünaamiliselt. Tuul teeb lisaks muutlikkuse, mille tõttu võib võimsustarbimine märkimisväärselt suureneda. Seetõttu on kõrgusel paigutumise andmetele üksnes tuginevad vastupidavuse arvutused sageli liialdatud. Täpsemad prognoosid nõuavad arusaamist sellest, kuidas võimsus muutub läbi terve missiooniprofiili.
Missioonipõhine modelleerimine jagab lennu segmentideks – stardiks, tõusuks, marsruutlennuks, laskumiseks ja maandumiseks – ning määrab igale segmendile võimsuse väärtuse. Stardi ja tõusu ajal on tavaliselt vajalik kõrgeim võimsus, samas kui laskumisel võib olla vaja väga vähe võimsust. Marsruutlennu võimsus sõltub õhukiirusest, aerodünaamilisest takistusest ja translaatsioonilisest tõstmisest. Mitmevõllaga lennukid (multirotor drones) kogevad edasi liikudes võimsuse väikest vähenemist, kuna propelleritesse siseneva õhu vool muutub tõhusamaks, kuid seda eeliseid kompenseerib sageli lennukikorpuse ja koorma suurenev takistus. Kaalutades iga segmenti selle kestuse järgi, saavad insenerid arvutada keskmise võimsuse väärtuse, mis paremini peegeldab tegelikke ekspluatatsioonitingimusi.
Keskkonningutingimused keerukustavad veelgi lennukestabiilsuse hindamist. Õhutihedus väheneb kõrguse ja temperatuuri tõusuga, mis vähendab propelleri tõhusust ja sunnib mootoreid pöörlema kiiremini, et säilitada tõstejõud. Külm ilm vähendab akude jõudlust, aeglustades keemilisi reaktsioone, samas kui soe ilm suurendab mootorite ja elektrooniliste kiirusregulaatorite soojuskoormust. Tuul mõjutab eriti oluliselt: tugeva vastutuulega lendamine võib kahekordistada võimsustarbimise, samas kui tuulega lendamine võib seda vähendada. Kuna keskkonnatingimuste muutlikkus on vältimatu, sisaldavad lennukestabiilsuse arvutused sageli ohutusmarginaali, et tagada lennukile tagasipöördumise võimalus ka halvenevates tingimustes.
Teine oluline tegur on akutüübi enda tervis. Aeglaselt põhjustavad korduvad laadimis- ja scarlaimistsüklid akusiseset keemiat muutusi, suurendades takistust ja vähendades mahutavust. See degradatsioon ilmneb pingelangusena koormuse all, mis võib varakult aktiveerida madala pinge hoiatused ja lühendada lennuaega. Akutüübi tervise jälgimine sisemise takistuse mõõtmiste ja laadimis-/scarlaimistsüklite arvutamise kaudu võimaldab operaatortel ennustada tootluslangust ja asendada akud enne kui need muutuvad usaldusväärseteks. Pikaajalisele sõidukiparkide haldamisele on akude vananemise jälgimine sama oluline kui lennuaegade arvutamine.
Kasuliku koorma omadused mõjutavad lennukiu pikkust ka muudel viisidel kui lihtsalt kaaluga. Paljud professionaalsed koormad – näiteks LiDAR-skannerid, mitmespektraalsed kaamerad ja side moodulid – tarbivad elektrit lennukiu akust. Seda lisatarbimist tuleb arvesse võtta koos propulssiooni energiatarbimisega, kui hinnatakse kogu energiakulu. 20 vatti tarbiv koorma võib esmapilgul tunduda tähtsusetu, kuid 30-minutilise missiooni jooksul tarbib see 10 vatt-tundi, mis võib vähendada lennuaega mitme minuti võrra. Seega peavad insenerid lennukiu pikkuse arvutamisel arvesse võtma nii koorma mehaanilisi kui ka elektrilisi mõjusid.
Propellerite valik mängib üllatavalt suurt rolli lennuaegade optimeerimisel. Suuremad propellerid väiksema sammuga on tavaliselt tõhusamad tõstejõu tekitamisel madalatel pöörlemiskiirustel, mistõttu sobivad nad eriti vastupidavusele orienteeritud lennukitele. Väiksemad, kõrgema sammuga propellerid teevad rohkem tõstejõudu kõrgematel kiirustel, kuid on paigalseisus vähem tõhusad. Propellerite omaduste sobitamine missiooni nõuetega võimaldab saavutada olulisi parandusi lennuaegades. Samuti mõjutab tõhusust mootori KV-väärtus – pöördeid volti kohta. Madala KV-ga mootorid koos suurte propelleritega annavad sageli paremat vastupidavust, kuna nad töötavad tõhusalt madalamatel pöörlemiskiirustel.
Täpsemate vastupidavuse prognooside koostamiseks toetuvad insenerid sageli empiirilistele testidele. Surveplatvormid annavad üksikasjalikke mõõtmisi tõukejõu, voolu, pinge ja tõhususe kohta konkreetsete mootori-ja propellerikombinatsioonide puhul. Need andmed võimaldavad inseneritel koostada töökindluse kõveraid, mis kujutavad võimsustarbimist tõukeväljundi funktsioonina. Teades lennukõrguse (drone) kaalu, saab määrata vajaliku tõukejõu iga mootori kohta ja lugeda vastava võimsusväärtuse kõveralt. See meetod on palju täpsem kui tootja spetsifikatsioonidele või lihtsatele paigalseisvatele mõõtmistele toetumine.
Kaasaegsed lennukid genereerivad laiaulatuslikke telemetria logisid, mis salvestavad lennu ajal praegust voolu, pinge, aktseleratsiooninupu asendit ja mootorite pöörlemiskiirust. Nende logide analüüs annab ülevaate sellest, kuidas võimsustarve muutub reaaltingimustes. Aeglaselt saavad operaatorid ehitada ennustusmudeleid, mis on kohandatud nende konkreetsele lennukile, kasuliku koormale ja missioonitüübile. Mõned täiustatud süsteemid kasutavad isegi masinõppet, et prognoosida lennuaega ajalooliste andmete, keskkonnatingimuste ja missiooni parameetrite põhjal.
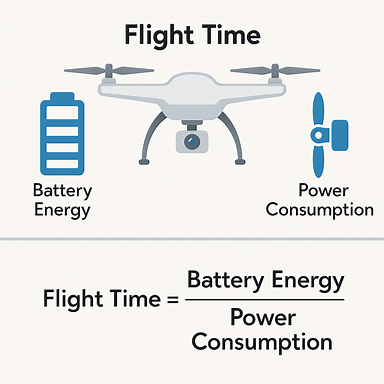
Nende tegurite keerukusest hoolimata jääb põhiline arvutus elegantselt lihtsaks: lennuaeg võrdub kasutatava energiaga, jagatud keskmise võimsustarbiguga. Probleem seisneb nende kahe väärtuse täpse määramises. Kasutatav energiat sõltub akukemiast, temperatuurist, vananemisest ja laadimispiirangutest. Keskmine võimsustarbimine sõltub kaalast, aerodünaamikast, edasiliikumise efektiivsusest, missiooni dünaamikast ja keskkonnatingimustest. Süstemaatiliselt analüüsides iga tegurit saavad insenerid koostada väga usaldusväärseid vastupidavuse hinnanguid.
Professionaalsetes operatsioonides ei ole vastupidavuse hindamine lihtsalt tehniline harjutus, vaid see on ka ohutusnõue. Regulatoorsed raamistikud nõuavad sageli, et lennukid säilitaksid ootamatute sündmuste, näiteks tuulemuutuste või hädaolukorras maandumiste jaoks reservenergiat. Täpne lennuaegu ennustamine tagab nende regulatsioonide järgimise ning vähendab õhus toimuvat võimsuskaotuse riski. Kaubanduslikutes rakendustes, nagu kaardistamine, inspektsioon ja postikohaletoimetamine, mõjutab vastupidavus otse tootlikkust ja kulutõhusust. Lennuk, mis suudab õhus olla isegi mõni minut kauem, võib ühe missiooni jooksul oluliselt suurema ala hõlmata või täita lisatöid.
Tulevikus lubavad akutehnoloogia edusammud muuta vastupidavuse arvutamise meetodeid. Liitium-vesinikul, tahkete elektrolüütide ja kõrgsilikooni anoodidega akud pakuvad kõrgemat energiatihedust kui praegused liitium-polimeer- ja liitium-ioonakud. Vesinikukütuseelemendid ja hübridsüsteemid pakuvad alternatiivseid lahendusi pikendatud lennuaegade saavutamiseks, eriti suurte lennukite puhul. Kui need tehnoloogiad täiustuvad, muutuvad ka vastupidavuse arvutamise meetodid, kuid energiaga ja võimsusega seotud aluspõhimõtted jäävad siiski keskseks.
Kokkuvõttes nõuab lennukite lennuaegade arvutamine põhjalikku mõistmist sellest, kuidas energia salvestatakse, teisendatakse ja tarbitakse. Kuigi põhivalem on lihtne, nõuab reaalse maailma täpsus hoolikat arvessevõtmist akutäitumise käitumisest, propulssioonieffektiivsusest, missiooni dünaamikast, keskkonnatingimustest ja kasuliku koorma omadustest. Teoreetilise modelleerimise ühendamisel empiirilise testimeetodiga ja andmete analüüsiga saavad insenerid lennuaegu usaldusväärselt ennustada ning optimeerida lennukid erinevateks missioonideks, mille jaoks nad on loodud. Lenduvõime ei ole lihtsalt tehniline andmepunkt; see peegeldab lennuki üldist konstruktsioonikvaliteeti ja operatsioonivalmidust.
