
ການທຳນາຍວ່າເຮືອບິນບໍ່ມີຄົນຂັບຈະຢູ່ໃນອາກາດໄດ້ດົນປານໃດອາດເບິ່ງຄືງ່າຍດາຍ ໂດຍການອ່ານເອກະສານຂໍ້ມູນຈາກຜູ້ຜະລິດ, ແຕ່ໃນທາງປະຕິບັດແລ້ວ ມັນເປັນໜຶ່ງໃນການຄຳນວນທີ່ສັບຊ້ອນທີ່ສຸດໃນດ້ານລະບົບອາກາດບໍ່ມີຄົນຂັບ. ເວລາບິນບໍ່ແມ່ນລັກສະນະທີ່ຄົງທີ່ ແຕ່ເປັນຜົນໄດ້ຮັບທີ່ເກີດຂຶ້ນຈາກການປະສານງານກັນລະຫວ່າງດ້ານໄຟຟ້າ, ເຄື່ອງຈັກ, ອາກາດສາດ ແລະ ສິ່ງແວດລ້ອມ. ວິສະວະກອນ, ນັກບິນ ແລະ ນັກຄົ້ນຄວ້າທັງໝົດພິງພາການຄຳນວນຄວາມຖືກຕ້ອງຂອງເວລາໃນການບິນເພື່ອວາງແຜນພາລະກິດ, ອອກແບບລະບົບຂັບເຄື່ອນ ແລະ ປະເມີນເຕັກໂນໂລຊີແບດເຕີຣີ. ດັ່ງນັ້ນ, ການເຂົ້າໃຈວິທີຄຳນວນເວລາບິນຂອງເຮືອບິນບໍ່ມີຄົນຂັບຈຶ່ງຕ້ອງອີງໃສ່ມຸມມອງທີ່ເປັນເອກະລາດຕໍ່ເຮືອບິນເປັນລະບົບການປ່ຽນແປງພະລັງງານ ແທນທີ່ຈະເປັນການລວມກັນຂອງສ່ວນປະກອບທີ່ແຍກຕ່າງຫາກ.
ໃນສ່ວນທີ່ສຳຄັນທີ່ສຸດຂອງການຄຳນວນນີ້ ແມ່ນຄວາມສຳພັນລະຫວ່າງ ພະລັງງານທີ່ເກັບໄວ້ ແລະ ການຟ້ອງເສຍພະລັງງານ ເບື່ອງດ້ານບັນຍາກາດ: ຂະໜາດຂອງຖ່ານໄຟຂອງເຮື່ອບິນບໍ່ມີຄົນຂັບເປັນເຊື່ອງເກັບພະລັງງານເຄມີ, ເຊິ່ງຈະຖືກປ່ຽນເປັນພະລັງງານໄຟຟ້າ ແລະ ຫຼັງຈາກນັ້ນຈະປ່ຽນເປັນກຳລັງຈັກສຳລັບການບິນ. ເວລາທີ່ເຮື່ອບິນໄດ້ຈະຂຶ້ນກັບອັດຕາການຫຼຸດລົງຂອງພະລັງງານໃນເຊື່ອງເກັບນີ້. ອັນທີ່ແທ້ຈິງແລ້ວ ຂະບວນການພື້ນຖານນີ້ຄ້າຍຄືກັບຮູບແບບການບໍລິໂພກເຊື້ອເພີງຂອງເຮື່ອບິນແບບດັ້ງເດີມ, ແຕ່ການຂັບເຄື່ອນດ້ວຍໄຟຟ້ານັ້ນມີລັກສະນະເປັນເອກະລັກເຊັ່ນ: ການຫຼຸດລົງຂອງຄ່າຄວາມຕີ່ນ (voltage sag), ເສັ້ນທາງການຖອນພະລັງງານທີ່ບໍ່ເປັນເສັ້ນຕົງ (nonlinear discharge curves), ແລະ ຄວາມສາມາດໃນການປະຕິບັດທີ່ຂຶ້ນກັບອຸນຫະພູມ. ປັດໄຈເຫຼົ່ານີ້ເຮັດໃຫ້ການຄາດຄະເນເວລາການບິນ (endurance estimation) ມີຄວາມນ່າສົນໃຈທາງດ້ານເຕັກນິກ ແລະ ມີຄວາມສຳຄັນຢ່າງຍິ່ງຕໍ່ການດຳເນີນງານ.
ເພື່ອເລີ່ມຕົ້ນ, ພະລັງງານທີ່ມີຢູ່ໃນຖ່ານຂອງບິນບັນຍາກາດ (drone) ຕ້ອງຖືກວັດແທກ. ບິນບັນຍາກາດທີ່ໃຊ້ໃນການບໍລິໂພກ ແລະ ບິນບັນຍາກາດທີ່ໃຊ້ໃນການປະກອບວິຊາຊີບສ່ວນຫຼາຍຈະໃຊ້ຖ່ານລີເທີຽມ-ໂປລີເມີ (LiPo) ຫຼື ຖ່ານລີເທີຽມ-ໄອອອນ (Li-ion) ໂດຍທີ່ຄວາມຈຸຂອງຖ່ານເຫຼົ່ານີ້ມັກຖືກສະແດງເປັນມີລີແອັມເປີ-ຊົ່ວໂມງ. ເຖິງຢ່າງໃດກໍຕາມ, ຄວາມຈຸຢືນດຽວກໍບໍ່ໄດ້ກຳນົດພະລັງງານທັງໝົດ; ຕ້ອງພິຈາລະນາຄ່າຄວາມຕ້ານທາງ (voltage) ເພີ່ມເຕີມ. ພະລັງງານທັງໝົດຂອງຖ່ານແມ່ນເປັນຜົນຄູນຂອງຄວາມຈຸ ແລະ ຄ່າຄວາມຕ້ານທາງທີ່ກຳນົດໄວ້ (nominal voltage) ແລະ ສະແດງເປັນວັດ-ຊົ່ວໂມງ. ການປ່ຽນແປງນີ້ເປັນສິ່ງທີ່ຈຳເປັນເນື່ອງຈາກການບໍລິໂພກພະລັງງານແມ່ນວັດແທກເປັນວັດ (watts) ແລະ ເວລາການບິນ (endurance) ແມ່ນເປັນອັດຕາສ່ວນຂອງວັດ-ຊົ່ວໂມງຕໍ່ວັດ. ແຕ່ວ່າ ການປ່ຽນແປງນີ້ກໍຍັງບໍ່ສາມາດສະທ້ອນເຖິງພຶດຕິກຳທີ່ເກີດຂື້ນໃນໂລກຈິງໄດ້ຢ່າງເຕັມທີ່. ຖ່ານເກືອບບໍ່ເຄີຍສະເໜີຄວາມຈຸທີ່ຖືກກຳນົດໄວ້ທັງໝົດ ເນື່ອງຈາກຄວາມຕ້ານທາງພາຍໃນ, ການເຖົ້າລົງ, ແລະ ຂອບເຂດຄວາມປອດໄພທີ່ກຳນົດຄ່າຕ່ຳສຸດຂອງຄວາມຕ້ານທາງ. ດັ່ງນັ້ນ, ວິສະວະກອນມັກຈະເຮັດວຽກກັບ “ພະລັງງານທີ່ໃຊ້ໄດ້” (usable energy) ເຊິ່ງເປັນຄ່າທີ່ຖືກຫຼຸດລົງເພື່ອສະທ້ອນເຖິງຂໍ້ຈຳກັດໃນການນຳໃຊ້ຈິງ ແທນທີ່ຈະເປັນຂໍ້ກຳນົດທີ່ໃຫ້ໄວ້ໃນຫ້ອງທົດລອງ.
ເມື່ອເຂົ້າໃຈແລ້ວວ່າພະລັງງານທີ່ມີຢູ່ແມ່ນເທົ່າໃດ ການສົນໃຈຈະຫັນໄປທີ່ການບໍລິໂພກພະລັງງານຂອງເຮື່ອບິນບັນຍາກາດ (drone). ສຳລັບເຮື່ອບິນບັນຍາກາດທີ່ມີຫຼາຍເຄື່ອງບິນ (multirotor platforms) ການຂັບເຄື່ອນຈະເປັນສ່ວນໃຫຍ່ທີ່ສຸດຂອງການໃຊ້ພະລັງງານ. ເຄື່ອງຍົນແຕ່ລະເຄື່ອງຈະຕ້ອງຜະລິດກຳລັງທີ່ພໍເທົ່າກັບນ້ຳໜັກຂອງເຮື່ອບິນບັນຍາກາດ, ແລະພະລັງງານທີ່ຕ້ອງການໃນການຜະລິດກຳລັງນີ້ຈະເພີ່ມຂຶ້ນຢ່າງໄວວ່າເມື່ອນ້ຳໜັກທີ່ເຮື່ອບິນບັນຍາກາດຕ້ອງຮັບນັ້ນເພີ່ມຂຶ້ນ. ຄວາມສຳພັນລະຫວ່າງກຳລັງທີ່ຜະລິດ (thrust) ແລະພະລັງງານ (power) ນັ້ນຖືກກຳນົດໂດຍອາກາດສາດຂອງແຜ່ນພັດ (propeller aerodynamics) ແລະປະສິດທິພາບຂອງເຄື່ອງຍົນ (motor efficiency) ເຊິ່ງທັງສອງຢ່າງນີ້ຈະປ່ຽນແປງໄປຕາມຄວາມໄວໃນການປັ່ນ (rotational speed). ເຮື່ອບິນບັນຍາກາດທີ່ບິນຢູ່ນິ່ງໆ (hovers) ດ້ວຍລະດັບຄວາມໄວທີ່ສະດວກສະບາຍຈະບໍລິໂພກພະລັງງານໜ້ອຍກວ່າເຮື່ອບິນບັນຍາກາດທີ່ເຮັດວຽກຢູ່ໃກ້ກັບຄວາມສາມາດໃນການຜະລິດກຳລັງສູງສຸດຂອງມັນຢ່າງຫຼາຍ. ນີ້ແມ່ນເຫດຜົນທີ່ເຮັດໃຫ້ການເພີ່ມນ້ຳໜັກຂອງສິ່ງທີ່ເຮື່ອບິນບັນຍາກາດຕ້ອງເຄື່ອນຍ້າຍ (payload) ເຖິງແມ່ນຈະເປັນນ້ຳໜັກທີ່ນ້ອຍກໍຕາມ ສາມາດຫຼຸດເວລາການບິນລົງໄດ້ຢ່າງຊັດເຈນ: ເນື່ອງຈາກມັນເຮັດໃຫ້ລະບົບຂັບເຄື່ອນເຂົ້າໄປຢູ່ໃນເຂດທີ່ມີປະສິດທິພາບຕ່ຳລົງ.
ພະລັງງານເມື່ອບິນຢູ່ກັບທີ່ (Hover power) ࡀຳລັງຖືກໃຊ້ເປັນເຄື່ອງວັດແທກເບື້ອງຕົ້ນສຳລັບການຄາດເດົາເວລາໃນການບິນຕໍ່ເນື່ອງ ເນື່ອງຈາກມັນສະແດງເຖິງສະພາບການທີ່ຄົງທີ່. ການວັດແທກປະຈຸໄຟຟ້າ ແລະ ຄ່າຄວາມຕ່າງ»ຂອງ»ໄຟຟ້າເວລາບິນຢູ່ກັບທີ່ ສາມາດໃຫ້ຄາດເດົາໂດຍກົງເຖິງການບໍລິໂພກພະລັງງານ. ແຕ່ວ່າ ພາລະສາດທີ່ແທ້ຈິງມັກຈະບໍ່ປະກອບດ້ວຍການບິນຢູ່ກັບທີ່ເທົ່ານັ້ນ. ການບິນໄປຂ້າງໜ້າ, ການຂຶ້ນສູງ, ການຫຼຸດຄວາມໄວ້ (braking), ແລະ ການປັບທິດທາງ (maneuvering) ລ້ວນແຕ່ເຮັດໃຫ້ເກີດພະລັງງານທີ່ປ່ຽນແປງຢູ່ເທິງມໍເຕີ. ລົມຍັງເພີ່ມຄວາມປ່ຽນແປງເພີ່ມເຕີມ, ເວລາດຽວກັນກໍອາດເຮັດໃຫ້ການບໍລິໂພກພະລັງງານເພີ່ມຂຶ້ນຢ່າງຫຼວງຫຼາຍ. ເນື່ອງຈາກເຫດຜົນນີ້ ການຄຳນວນເວລາໃນການບິນຕໍ່ເນື່ອງທີ່ອີງໃສ່ຂໍ້ມູນການບິນຢູ່ກັບທີ່ເທົ່ານັ້ນ ມັກຈະເປັນການຄາດເດົາທີ່ເກີນຄວາມເປັນຈິງ. ການຄາດເດົາທີ່ຖືກຕ້ອງກວ່ານີ້ ຕ້ອງອີງໃສ່ຄວາມເຂົ້າໃຈເຖິງວິທີທີ່ພະລັງງານປ່ຽນແປງໄປຕາມລັກສະນະຂອງພາລະສາດທັງໝົດ.
ການຈຳລອງທີ່ອີງໃສ່ພາລະບົດບາດແບ່ງການບິນອອກເປັນສ່ວນຕ່າງໆ—ການບິນຂຶ້ນ, ການປີນຂຶ້ນ, ການບິນຢູ່ຄວາມສູງຄົງທີ່, ການລົງ, ແລະ ການຈອດ—ແລະ ກຳນົດຄ່າພະລັງງານໃຫ້ແຕ່ລະສ່ວນ. ການບິນຂຶ້ນ ແລະ ການປີນຂຶ້ນມັກຈະຕ້ອງການພະລັງງານສູງສຸດ, ໃນຂະນະທີ່ການລົງອາດຈະຕ້ອງການພະລັງງານນ້ອຍຫຼາຍ. ພະລັງງານໃນເວລາບິນຢູ່ຄວາມສູງຄົງທີ່ຂຶ້ນກັບຄວາມໄວໃນອາກາດ, ການຕ້ານທາງອາກາດ, ແລະ ການຍົກທາງກາງ. ເຮືອບິນບັນທຸກຫຼາຍເຄື່ອງ (multirotor drones) ມີການຫຼຸດລົງຂອງພະລັງງານເລັກນ້ອຍໃນເວລາບິນໄປຂ້າງໜ້າ ເນື່ອງຈາກການລົ້ນຜ່ານຂອງອາກາດຜ່ານປີກກົງ (propellers) ເປັນໄປຢ່າງມີປະສິດທິພາບຫຼາຍຂຶ້ນ, ແຕ່ຜົນປະໂຫຍດນີ້ມັກຖືກຊົດເຊີຍດ້ວຍການຕ້ານທາງທີ່ເພີ່ມຂຶ້ນຈາກໂຄງສ້າງເຮືອບິນ ແລະ ພາຫະນະທີ່ບັນທຸກ. ໂດຍການໃຊ້ນ້ຳໜັກໃຫ້ແຕ່ລະສ່ວນຕາມເວລາທີ່ໃຊ້, ວິສະວະກອນສາມາດຄຳນວນຄ່າພະລັງງານເສີມສະເລ່ຍທີ່ສາມາດສະທ້ອນຄວາມເປັນຈິງໃນການປະຕິບັດງານໄດ້ດີຂຶ້ນ.
ເງື່ອນໄຂດ້ານສິ່ງແວດລ້ອມເພີ່ມຄວາມສັບສົນໃຫ້ການປະເມີນຄວາມຍືນຍົງ. ຄວາມໜາແໜ້ນຂອງອາກາດຈະຫຼຸດລົງຕາມຄວາມສູງເທິງລະດັບນ້ຳທະເລ ແລະ ອຸນຫະພູມ ເຊິ່ງເຮັດໃຫ້ປະສິດທິພາບຂອງແຜ່ນພັດລົມຫຼຸດລົງ ແລະ ບັງຄັບໃຫ້ມໍເຕີ້ເລີ່ມຫຼຸນໄວຂຶ້ນເພື່ອຮັກສາກຳລັງຂັບເຄື່ອນ. ອາກາດເຢັນຈະຫຼຸດລົງໃນປະສິດທິພາບຂອງຖ່ານໄຟ ໂດຍການຊ້າຂອງປະຕິກິລິຍາເຄມີ ໃນຂະນະທີ່ອາກາດຮ້ອນຈະເພີ່ມຄວາມເຄັ່ງຕຶງດ້ານອຸນຫະພູມໃສ່ມໍເຕີ້ ແລະ ອຸປະກອນຄວບຄຸມຄວາມໄວເຄື່ອນທີ່ (ESC). ລົມມີອິດທິພົວຢ່າງເດັ່ນຊັດ: ການບິນຕ້ານລົມທີ່ຮຸນແຮງອາດເຮັດໃຫ້ການບໍລິໂພກພະລັງງານເພີ່ມຂຶ້ນເຖິງສອງເທົ່າ ໃນຂະນະທີ່ການບິນຕາມທິດລົມອາດຈະຫຼຸດລົງ. ເນື່ອງຈາກວ່າຄວາມປ່ຽນແປງດ້ານສິ່ງແວດລ້ອມເປັນສິ່ງທີ່ຫຼີກລ່ຽງບໍ່ໄດ້ ດັ່ງນັ້ນການຄຳນວນຄວາມຍືນຍົງມັກຈະປະກອບດ້ວຍອັດຕາຄວາມປອດໄພເພື່ອຮັບປະກັນວ່າເຮືອບິນບໍ່ມີຄົນຂັບ (drone) ສາມາດບິນກັບຄືນໄປຍັງຈຸດເລີ່ມຕົ້ນໄດ້ເຖິງແມ່ນວ່າເງື່ອນໄຂຈະເລີ່ມເສື່ອມຄຸນນະພາບ.
ປັດໄຈອີກຢ່າງໜຶ່ງທີ່ສຳຄັນແມ່ນສຸຂະພາບຂອງຖ່ານໄຟເອງ. ໃນເວລາທີ່ຜ່ານໄປ, ການຊາດ-ຄາຍພະລັງງານຊ້ຳໆກັນຈະເຮັດໃຫ້ສ່ວນປະກອບພາຍໃນຂອງຖ່ານໄຟເສື່ອມຄຸນນະພາບ, ເພີ່ມຄວາມຕ້ານທາງໄຟຟ້າ ແລະ ຫຼຸດທີ່ຄວາມຈຸຂອງຖ່ານໄຟ. ການເສື່ອມຄຸນນະພາບນີ້ຈະສະແດງອອກເປັນການຫຼຸດລົງຂອງຄ່າຄວາມຕ້ານ (voltage sag) ໃຕ້ການໃຊ້ງານ, ເຊິ່ງອາດຈະເຮັດໃຫ້ເກີດການເຕືອນຄ່າຄວາມຕ້ານຕ່ຳກ່ອນເວລາອັນຄວນ ແລະ ຫຼຸດເວລາບິນລົງ. ການຕິດຕາມສຸຂະພາບຂອງຖ່ານໄຟຜ່ານການວັດແທກຄ່າຄວາມຕ້ານພາຍໃນ ແລະ ຈຳນວນຄັ້ງທີ່ຊາດ-ຄາຍ ສາມາດຊ່ວຍໃຫ້ຜູ້ປະຕິບັດການຄາດເດົາການຫຼຸດລົງຂອງປະສິດທິພາບ ແລະ ແທນຖ່ານໄຟກ່ອນທີ່ມັນຈະເສື່ອມຄຸນນະພາບຈົນບໍ່ສາມາດເຊື່ອຖືໄດ້. ສຳລັບການຈັດການຝູງຍານທີ່ຍາວນານ, ການຕິດຕາມການເສື່ອມຄຸນນະພາບຂອງຖ່ານໄຟມີຄວາມສຳຄັນເທົ່າກັບການຄຳນວນເວລາບິນ.
ລັກສະນະຂອງພາຫະນະທີ່ເຮັດວຽກຍັງມີຜົນຕໍ່ຄວາມຖືກຕ້ອງໃນການບິນທີ່ເກີນເຖິງນ້ຳໜັກອີກດ້ວຍ. ພາຫະນະທີ່ເຮັດວຽກທີ່ໃຊ້ໃນດ້ານວິຊາຊີບຫຼາຍປະເພດ—ເຊັ່ນ: ເຄື່ອງສະແກນ LiDAR, ເຄື່ອງຖ່າຍຮູບທີ່ມີຫຼາຍສະເພກຕຣັມ (multispectral cameras), ແລະ ເຄື່ອງຈັກສື່ສານ—ຈະດຶງພະລັງງານໄຟຟ້າຈາກຖ່ານໄຟຂອງເຮື່ອງບິນ. ການໃຊ້ພະລັງງານເພີ່ມເຕີມນີ້ຈະຕ້ອງຖືກເພີ່ມເຂົ້າໄປໃນພະລັງງານທີ່ໃຊ້ໃນການຂັບເຄື່ອນເພື່ອຄຳນວນການໃຊ້ພະລັງງານທັງໝົດ. ພາຫະນະທີ່ເຮັດວຽກທີ່ດຶງພະລັງງານ 20 ແວດອາດຈະເບິ່ງຄືນ້ອຍນິດ, ແຕ່ໃນໄລຍະເວລາບິນ 30 ນາທີ ມັນຈະໃຊ້ພະລັງງານ 10 ແວດ-ຊົ່ວໂມງ, ເຊິ່ງອາດຈະຫຼຸດເວລາການບິນລົງໄດ້ຫຼາຍນາທີ. ດັ່ງນັ້ນ, ວິສະວະກອນຈຶ່ງຈຳເປັນຕ້ອງພິຈາລະນາທັງຜົນກະທົບດ້ານກົລະປະຕິການ ແລະ ດ້ານໄຟຟ້າຂອງພາຫະນະທີ່ເຮັດວຽກເມື່ອຄຳນວນຄວາມຖືກຕ້ອງໃນການບິນ.
ການເລືອກເອງຂອງແຜ່ນພັດມີບົດບາດທີ່ໃຫຍ່ຢ່າງນ້ອຍໃນການປັບປຸງເວລາບິນ. ແຜ່ນພັດທີ່ໃຫຍ່ຂຶ້ນແລະມີຄ່າຄວາມເອີ້ນຕ່ຳ (pitch) ມັກຈະມີປະສິດທິພາບດີຂຶ້ນໃນການສ້າງກຳລັງຂັບເຄື່ອນທີ່ຄວາມໄວ້ການປັ່ນທີ່ຕ່ຳ, ເຮັດໃຫ້ເປັນທາງເລືອກທີ່ດີທີ່ສຸດສຳລັບຍານບິນບໍ່ມີຄົນຂັບທີ່ອອກແບບມາເພື່ອຄວາມຍືນຍາວ. ແຜ່ນພັດທີ່ນ້ອຍກວ່າແລະມີຄ່າຄວາມເອີ້ນສູງ (high-pitch) ສາມາດສ້າງກຳລັງຂັບເຄື່ອນໄດ້ຫຼາຍຂຶ້ນໃນຄວາມໄວ້ສູງ ແຕ່ມີປະສິດທິພາບຕ່ຳກວ່າໃນການບິນຢູ່ກັບທີ່. ການຈັບຄູ່ລັກສະນະຂອງແຜ່ນພັດໃຫ້ເຂົ້າກັບຄວາມຕ້ອງການຂອງພາລະກິດສາມາດເຮັດໃຫ້ເວລາບິນດີຂຶ້ນຢ່າງເປັນທີ່ສັງເກດເຫັນ. ໃນທາງດຽວກັນ, ອັດຕາ KV ຂອງມໍເຕີ (ຈຳນວນການປັ່ນຕໍ່ໂ volt ໜຶ່ງ) ກໍມີຜົນຕໍ່ປະສິດທິພາບ. ມໍເຕີທີ່ມີຄ່າ KV ຕ່ຳ ທີ່ຈັບຄູ່ກັບແຜ່ນພັດທີ່ໃຫຍ່ ມັກຈະໃຫ້ຄວາມຍືນຍາວທີ່ດີກວ່າເນື່ອງຈາກມັນເຮັດວຽກໄດ້ຢ່າງມີປະສິດທິພາບໃນອັດຕາ RPM ຕ່ຳ.
ເພື່ອປັບປຸງຄວາມຖືກຕ້ອງຂອງການທຳนายຄວາມຍືນຍາວ, ວິສະວະກອນມັກອີງໃສ່ການທົດສອບຈິງ. ເຄື່ອງວັດແທກກຳລັງຂັບເຄື່ອນ (Thrust stands) ສະຫຼາດການວັດແທກຢ່າງລະອອງເຖິງກຳລັງຂັບເຄື່ອນ, ປະລິມານໄຟຟ້າ, ຄ່າຄົງທີ່ຂອງໄຟຟ້າ ແລະ ປະສິດທິຜົນ ສຳລັບຊຸດມໍເຕີ-ປີກກົບ (motor-propeller combinations) ໃນແຕ່ລະຮູບແບບ. ຂໍ້ມູນເຫຼົ່ານີ້ຊ່ວຍໃຫ້ວິສະວະກອນສາມາດສ້າງເສັ້ນສະແດງປະສິດທິຜົນ (performance curves) ທີ່ສະແດງຄວາມສຳພັນລະຫວ່າງການບໍລິໂພກພະລັງງານ ແລະ ກຳລັງຂັບເຄື່ອນທີ່ໄດ້. ໂດຍຮູ້ນ້ຳໜັກຂອງເຮືອບິນບໍ່ມີຄົນຂັບ (drone), ພວກເຮົາສາມາດກຳນົດກຳລັງຂັບເຄື່ອນທີ່ຕ້ອງການຕໍ່ມໍເຕີໜຶ່ງຕົວ ແລະ ອ່ານຄ່າພະລັງງານທີ່ສອດຄ່ອງຈາກເສັ້ນສະແດງດັ່ງກ່າວ. ວິທີນີ້ມີຄວາມຖືກຕ້ອງຫຼາຍກວ່າການອີງໃສ່ຂໍ້ມູນຈາກຜູ້ຜະລິດ ຫຼື ການວັດແທກພຽງແຕ່ໃນສະຖານະການບິນຢູ່ກັບທີ່ (hover measurements).
ເຮືອບິນທີ່ທັນສະໄໝຍັງສ້າງບັນທຶກຂໍ້ມູນທີ່ເປັນລາຍລະອຽດຢ່າງຫຼວງຫຼາຍ ເຊິ່ງບັນທຶກຄ່າປັດຈຸບັນ, ຄ່າແຕ່ງຕັ້ງ, ຕຳແໜ່ງຂອງຄີເລີ່ມເຄື່ອນ (throttle), ແລະ ອັດຕາການປະຕິບັດງານຂອງມໍເຕີ (RPM) ໃນເວລາບິນທັງໝົດ. ການວິເຄາະບັນທຶກເຫຼົ່ານີ້ໃຫ້ຂໍ້ມູນເພີ່ມເຕີມກ່ຽວກັບວິທີການທີ່ການບໍລິໂພກພະລັງງານປ່ຽນແປງໄປຕາມສະພາບການຈິງ. ໃນໄລຍະເວລາທີ່ຍາວນານ, ຜູ້ປະຕິບັດງານສາມາດສ້າງແບບຈຳລອງທີ່ຄາດເດົາໄດ້ ເຊິ່ງຖືກປັບແຕ່ງໃຫ້ເໝາະສົມກັບເຮືອບິນເປົ້າໝາຍ, ນ້ຳໜັກທີ່ເຮືອບິນຕ້ອງເຄື່ອນຍ້າຍ (payload), ແລະ ປະເພດພາລະກິດທີ່ເຮັດ. ລະບົບທີ່ທັນສະໄໝບາງລະບົບເຖິງຂັ້ນໃຊ້ເຕັກນິກການຮຽນຮູ້ຂອງເຄື່ອງຈັກ (machine learning) ເພື່ອຄາດເດົາເວລາບິນທີ່ຈະເກີດຂຶ້ນຕາມຂໍ້ມູນປະຫວັດສາດ, ຂໍ້ມູນສິ່ງແວດລ້ອມ, ແລະ ປັດໄຈຂອງພາລະກິດ.
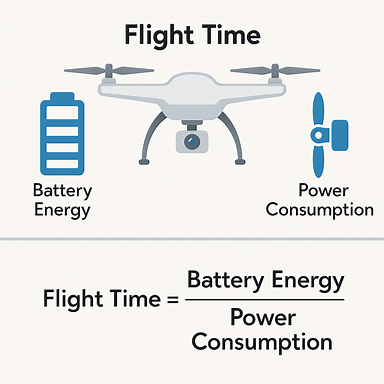
ເຖິງແມ່ນວ່າປັດໄຈເຫຼົ່ານີ້ຈະສັບສົນ, ການຄຳນວນພື້ນຖານຍັງຄົງງ່າຍດາຍຢ່າງງາມ: ເວລາບິນເທົ່າກັບພະລັງງານທີ່ໃຊ້ໄດ້ ແບ່ງດ້ວຍ ການບໍລິໂພກພະລັງງານເສີມສະເລ່ຍ. ອຸປະສັກຢູ່ທີ່ການກຳນົດຄ່າທັງສອງນີ້ຢ່າງຖືກຕ້ອງ. ພະລັງງານທີ່ໃຊ້ໄດ້ຂຶ້ນກັບເຄມີຂອງຖ່ານ, ອຸນຫະພູມ, ການເຖົ້າຂອງຖ່ານ, ແລະ ຂອບເຂດການປ່ອຍທີ່ອະນຸຍາດ. ການບໍລິໂພກພະລັງງານເສີມສະເລ່ຍຂຶ້ນກັບນ້ຳໜັກ, ການອອກແບບທີ່ເຮັດໃຫ້ການລົ້ນຜ່ານອາກາດດີ, ປະສິດທິພາບຂອງລະບົບຂັບເຄື່ອນ, ລັກສະນະພາລະກິດ, ແລະ ສະພາບແວດລ້ອມ. ໂດຍການວິເຄາະແຕ່ລະປັດໄຈຢ່າງເປັນລະບົບ, ວິສະວະກອນສາມາດສ້າງຄາດເດົາເຖິງອາຍຸການໃຊ້ງານທີ່ເຊື່ອຖືໄດ້ສູງ.
ໃນການດຳເນີນງານທາງດ້ານມືອາຊີບ ການປະເມີນຄວາມຍືນຍາວຂອງພະລັງງານບໍ່ໄດ້ເປັນພຽງແຕ່ການຝຶກຝົນທາງດ້ານເຕັກນິກເທົ່ານັ້ນ ແຕ່ຍັງເປັນຄວາມຕ້ອງການດ້ານຄວາມປອດໄພອີກດ້ວຍ. ກົດລະບຽບຕ່າງໆ ມັກຈະກຳນົດໃຫ້ບິນເຮືອບິນບໍ່ມີຄົນຂັບ (drone) ຮັກສາພະລັງງານສຳ dựເພີ່ມເພື່ອຮັບມືກັບເຫດການທີ່ບໍ່ຄາດຄິດເຊັ່ນ: ການປ່ຽນແປງຂອງທິດທາງລົມ ຫຼື ການລົງຈອດເປັນການฉຸກເຮີບ. ການທຳนายເວລາບິນຢ່າງຖືກຕ້ອງ ສາມາດຮັບປະກັນການປະຕິບັດຕາມກົດລະບຽບເຫຼົ່ານີ້ ແລະ ລົດຄວາມສ່ຽງຂອງການສູນເສຍພະລັງງານໃນລະຫວ່າງການບິນ. ສຳລັບການນຳໃຊ້ເພື່ອການຄ້າ ເຊັ່ນ: ການສ້າງແຜນທີ່, ການກວດສອບ ແລະ ການຈັດສົ່ງສິນຄ້າ ຄວາມຍືນຍາວຂອງພະລັງງານມີຜົນຕໍ່ຜະລິດຕິພາບ ແລະ ປະສິດທິພາບດ້ານຕົ້ນທຶນໂດຍກົງ. ບິນເຮືອບິນບໍ່ມີຄົນຂັບທີ່ສາມາດບິນຢູ່ໃນອາກາດໄດ້ຍາວຂຶ້ນເຖິງແຕ່ພຽງບໍ່ກີ່ເທົ່າໃດນາທີ ກໍອາດຈະສາມາດຄຸມເອົາເຂດທີ່ກວ້າງຂຶ້ນຫຼາຍ ຫຼື ສຳເລັດເຮັດວຽກເພີ່ມເຕີມໃນແຕ່ລະພາລະກິດ.
ໃນອະนาຄົດ ການພັດທະນາດ້ານເຕັກໂນໂລຢີແບດເຕີຣີຈະປ່ຽນແປງວິທີການຄຳນວນເຖິງເວລາບິນຕໍ່ເນື່ອງ. ແບດເຕີຣີ້ລີເທີຽມ-ຊູເຟີ, ແບດເຕີຣີ້ສະເຕີໂອລິດ (solid-state), ແລະ ແບດເຕີຣີ້ທີ່ມີອານອດທີ່ເປັນຊິລິໂຄນສູງ ມີຄວາມໜາແໜ້ນພະລັງງານທີ່ສູງກວ່າເຕັກໂນໂລຢີ LiPo ແລະ Li-ion ທີ່ໃຊ້ຢູ່ໃນປັດຈຸບັນ. ເຊວເລີ່ງເຮີດໂຣເຈັນ ແລະ ລະບົບໄຟຟ້າລວມ (hybrid power systems) ໃຫ້ທາງເລືອກອື່ນໆເພື່ອຍືດເວລາບິນໃຫ້ຍາວຂຶ້ນ ໂດຍເປັນພິເສດສຳລັບເຮືອບິນບໍ່ມີຄົນຂັບທີ່ມີຂະໜາດໃຫຍ່. ເມື່ອເຕັກໂນໂລຢີເຫຼົ່ານີ້ມີຄວາມສົມບູນແລ້ວ ວິທີການທີ່ໃຊ້ຄຳນວນເວລາບິນຕໍ່ເນື່ອງຈະມີການປ່ຽນແປງໄປດ້ວຍ, ແຕ່ຫຼັກການພື້ນຖານດ້ານພະລັງງານ ແລະ ກຳລັງຈະຍັງຄົງເປັນສິ່ງທີ່ສຳຄັນທີ່ສຸດ.
ໂດຍສະຫຼຸບ, ການຄຳນວນເວລາບິນຂອງເຮືອບິນບໍ່ມີຄົນຂັບຕ້ອງໃຊ້ຄວາມເຂົ້າໃຈຢ່າງລະອຽດກ່ຽວກັບວິທີການທີ່ພະລັງງານຖືກເກັບຮັກສາ, ປ່ຽນແປງ, ແລະ ບໍລິໂພກ. ເຖິງແມ່ນວ່າສູດພື້ນຖານຈະງ່າຍດາຍ, ແຕ່ຄວາມຖືກຕ້ອງໃນສະພາບການຈິງຕ້ອງການການພິຈາລະນາຢ່າງລະມັດລະວັງຕໍ່ການປະພຶດຕົວຂອງຖ່ານ, ປະສິດທິພາບຂອງລະບົບຂັບເຄື່ອນ, ລັກສະນະຂອງພາລະກິດ, ອິດທິພົນຈາກສິ່ງແວດລ້ອມ, ແລະ ລັກສະນະຂອງພາລະບົທຸກ. ໂດຍການປະສົມປະສານການຈຳລອງທາງທິດສະດີເຂົ້າກັບການທົດສອບຈິງ ແລະ ການວິເຄາະຂໍ້ມູນ, ວິສະວະກອນສາມາດທຳนายເວລາບິນໄດ້ຢ່າງໝັ້ນໃຈ ແລະ ສາມາດປັບປຸງເຮືອບິນບໍ່ມີຄົນຂັບໃຫ້ເໝາະສົມກັບພາລະກິດທີ່ຫຼາກຫຼາຍທີ່ມັນຖືກອອກແບບມາເພື່ອປະຕິບັດ. ເວລາບິນຕໍ່เนື່ອງບໍ່ໄດ້ເປັນພຽງແຕ່ຂໍ້ກຳນົດດ້ານເຕັກນິກເທົ່ານັ້ນ, ແຕ່ມັນເປັນການສະທ້ອນຄຸນນະພາບທັງໝົດຂອງການອອກແບບ ແລະ ຄວາມພ້ອມໃນການປະຕິບັດງານຂອງເຮືອບິນບໍ່ມີຄົນຂັບ.
