
Å forutsi hvor lenge en drone kan forbli i luften kan virke som en enkel sak å lese av produsentens spesifikasjonsark, men i praksis er det en av de mest nyanserte beregningene innen området for ubemannede luftfartøy. Flytid er ikke en fast egenskap, men et fremkommet resultat av elektriske, mekaniske, aerodynamiske og miljømessige vekselvirkninger. Ingeniører, piloter og forskere stoler alle på nøyaktige estimater av rekkevidde for å planlegge oppdrag, utforme framdriftssystemer og vurdere batteriteknologier. Å forstå hvordan man beregner dronens flytid krever derfor en helhetlig tilnærming til dronen som et energiomformende system, snarare enn som en samling isolerte komponenter.
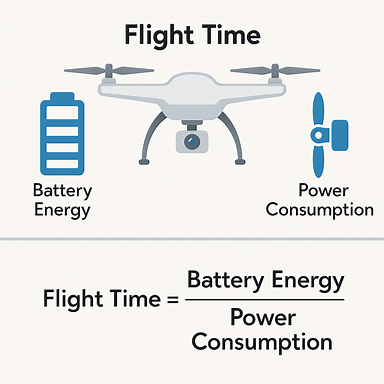
I kjerne av beregningen ligger forholdet mellom lagret energi og strømforbruk en dronebatteri fungerer som et reservoar for kjemisk energi, som omformes til elektrisk energi og deretter til mekanisk drivkraft. Flyvningstiden avhenger av hvor raskt dette reservoaret tømmes. Selv om det grunnleggende prinsippet likner på drivstofforbrukmodellen til tradisjonelle luftfartøy, innfører elektrisk fremdrift unike egenskaper som spenningsfall, ikke-lineære utladningskurver og temperaturavhengig ytelse. Disse faktorene gjør at estimering av flyvetid både er teknisk interessant og operasjonelt kritisk.
For å begynne med må energien som er tilgjengelig i en dronebatteri kvantifiseres. De fleste forbruker- og profesjonelle droner bruker litium-polymere (LiPo) eller litium-ion (Li-ion)-pakker, hvis kapasiteter vanligvis uttrykkes i milliampere-timer. Kapasiteten alene bestemmer imidlertid ikke energien; spenningen må også tas med i betraktning. En batteris totale energi er produktet av dens kapasitet og nominell spenning, uttrykt i watt-timer. Denne omregningen er avgjørende fordi efforbruk måles i watt, og rekkevidde er til slutt forholdet mellom watt-timer og watt. Selv denne omregningen fanger imidlertid ikke fullt ut det reelle oppførselen i praksis. Batterier leverer sjelden sin fulle angitte kapasitet på grunn av indre motstand, aldring og sikkerhetsbegrensninger for minimumsspenning. Som et resultat arbeider ingeniører ofte med «brukbar energi», en redusert verdi som reflekterer praktiske begrensninger i stedet for laboratoriespesifikasjoner.
Når den tilgjengelige energien er forstått, rettes oppmerksomheten mot dronens efforbruk. For multikopterplattformer står framdriften for den overveiende delen av energiforbruket. Hver motor må generere tilstrekkelig lyftekraft for å motvirke dronens vekt, og effekten som kreves for å produsere denne lyftekraften øker raskt når belastningen øker. Forholdet mellom lyftekraft og effekt styres av propelleraerodynamikken og motorens virkningsgrad, begge varierer med rotasjonshastigheten. En drone som svever ved et behagelig gassnivå forbruker betydelig mindre effekt enn en drone som opererer nær sin maksimale lyftekraftkapasitet. Dette er grunnen til at tillegg av last, selv små, kan merkbar redusere flytid: de presser framdriftssystemet inn i en mindre effektiv driftsregion.
Svæveeffekt brukes ofte som en basis for estimering av rekkevidde, fordi den representerer en stabil tilstand. Måling av svævestrøm og -spenning gir en direkte estimert effektförbrukning. Imidlertid består virkelige oppdrag sjelden av ren svæving. Framoverflyging, stigning, bremsing og manøvrering påvirker alle motorene med dynamiske belastninger. Vind legger til ytterligere variasjon og kan noen ganger øke effektförbrukningen betydelig. Av denne grunnen tenderer rekkeviddeberegninger som kun er basert på svævedata til å være optimistiske. Mer nøyaktige prediksjoner krever en forståelse av hvordan effekten svinger gjennom hele et oppdragsprofil.
Modellering basert på oppdrag deler en flyvning opp i segmenter – start, klatring, cruise, nedstigning og landing – og tilordner en effektverdi til hvert segment. Start og klatring krever vanligvis den høyeste effekten, mens nedstigning kan kreve svært liten effekt. Cruise-effekten avhenger av luftfart, aerodynamisk motstand og translasjonsløft. Multikopterdroner opplever en moderat reduksjon i effekt under framoverflyvning fordi luftstrømmen gjennom propellene blir mer effektiv, men denne fordelen oppveies ofte av økt motstand fra luftfartøykroppen og lasten. Ved å vekte hvert segment etter varigheten dets, kan ingeniører beregne en gjennomsnittlig effektverdi som bedre reflekterer den virkelige driftssituasjonen.
Miljøforhold forverrer ytterligere estimeringen av rekkevidde. Lufttettheten avtar med høyden og temperaturen, noe som reduserer propellereffektiviteten og tvinger motorene til å rotere raskere for å opprettholde driften. Kaldt vær reduserer batteriytelsen ved å senke de kjemiske reaksjonene, mens varmt vær øker termisk stress på motorer og elektroniske hastighetsregulatorer. Vind er spesielt innflytelsesrik: å fly mot en sterk motvind kan doble effektförbrukningen, mens å fly med medvind kan redusere den. Ettersom miljøvariabilitet er unngåelig, inkluderer beregninger av rekkevidde ofte en sikkerhetsmargin for å sikre at dronen kan vende hjem selv under forverrede forhold.
En annen viktig faktor er batteriets egen helse. Med tiden degraderes batteriets indre kjemi på grunn av gjentatte lade- og utladesykler, noe som øker motstanden og reduserer kapasiteten. Denne degradasjonen viser seg som spenningsfall under belastning, noe som kan utløse lavspenningsadvarsler for tidlig og forkorte flytiden. Ved å overvåke batterihelsen gjennom målinger av indre motstand og antall sykler kan operatører forutse ytelsesnedgang og bytte ut batterier før de blir upålitelige. For langsiktig flåtforvaltning er det like viktig å følge med på batterialdering som å beregne flytid.
Lasteegenskaper påvirker også rekkevidden på måter som går utover vekten. Mange profesjonelle laster – for eksempel LiDAR-scannere, multispektralkameraer og kommunikasjonsmoduler – trekker elektrisk kraft fra dronens batteri. Denne tilleggsforbruket må legges til fremdriftskraften når man estimerer det totale energiforbruket. En last som trekker 20 watt kan virke ubetydelig, men over en 30-minutters oppdrag bruker den 10 watt-timer, noe som kan redusere flytiden med flere minutter. Ingeniører må derfor ta hensyn til både de mekaniske og de elektriske effektene av laster når de beregner rekkevidden.
Valg av propell spiller en overraskende stor rolle for optimalisering av flygetid. Større propeller med lavere stigning er ofte mer effektive til å generere drivkraft ved lave omdreiningshastigheter, noe som gjør dem ideelle for droner der rekkevidde er avgjørende. Mindre propeller med høy stigning produserer mer drivkraft ved høye hastigheter, men er mindre effektive ved svævning. Å tilpasse propellegenskapene til oppgavens krav kan gi betydelige forbedringer av flygetiden. På samme måte påvirker motorens KV-verdi – antall omdreininger per volt – effektiviteten. Lav-KV-motorer kombinert med store propeller gir ofte bedre rekkevidde, siden de opererer effektivt ved lavere omdreiningshastighet.
For å forbedre forutsigelsene av rekkevidde, stoler ingeniører ofte på empirisk testing. Trykkstasjoner gir detaljerte målinger av trykk, strøm, spenning og virkningsgrad for spesifikke motor-propell-kombinasjoner. Disse dataene lar ingeniører opprette ytelseskurver som viser sammenhengen mellom effektförbruk og trykkutgang. Ved å kjenne dronens vekt kan man bestemme det nødvendige trykket per motor og lese av den tilsvarende effektverdien fra kurven. Denne metoden er langt mer nøyaktig enn å stole på produsentens spesifikasjoner eller enkle sveve-målinger.
Moderne droner genererer også omfattende telemetridatafiler som registrerer strøm, spenning, gassposisjon og motoromdreininger gjennom hele en flyvning. Å analysere disse loggene gir innsikt i hvordan strømforbruket varierer under reelle forhold. Med tiden kan operatører bygge prediktive modeller som er tilpasset deres spesifikke drone, last og misjons type. Noen avanserte systemer bruker til og med maskinlæring til å forutsi flytid basert på historiske data, miljødata og misjonsparametere.
Selv om disse faktorene er komplekse, forblir den grunnleggende beregningen elegant enkel: flygetid er lik tilgjengelig energi dividert med gjennomsnittlig effektförbrukning. Utfordringen ligger i å bestemme disse to verdiene nøyaktig. Tilgjengelig energi avhenger av batterikjemi, temperatur, aldring og utladningsgrenser. Gjennomsnittlig effektförbrukning avhenger av vekt, aerodynamikk, framdriftseffektivitet, oppgavedynamikk og miljøforhold. Ved å analysere hver faktor systematisk kan ingeniører produsere svært pålitelige estimater for rekkevidde.
I profesjonelle operasjoner er estimering av rekkevidde ikke bare en teknisk øvelse, men også et sikkerhetskrav. Reguleringsrammeverk krever ofte at droner har reserveenergi til uventede hendelser, som for eksempel vindendringer eller nødlandinger. Nøyaktig prediksjon av flytid sikrer overholdelse av disse reglene og reduserer risikoen for strømbrudd i luften. For kommersielle anvendelser som kartlegging, inspeksjon og utlevering påvirker rekkevidden direkte produktiviteten og kostnadseffektiviteten. En drone som kan forbli i luften bare noen få minutter lenger, kan dekke betydelig større områder eller fullføre flere oppgaver per oppdrag.
Med blikket mot fremtiden lover fremskritt innen batteriteknologi å omforme beregningene av rekkevidde. Litium-svovel-, faststoff- og batterier med anoder med høyt innhold av silisium tilbyr høyere energitetthet enn dagens LiPo- og litium-ion-kjemier. Hydrogenbrenselceller og hybridkraftsystemer gir alternative veier til utvidet flytid, spesielt for store droner. Når disse teknologiene modnes, vil metodene som brukes til å beregne rekkevidde utvikles videre, men de grunnleggende prinsippene for energi og effekt vil forbli sentrale.
Oppsummert krever beregning av dronens flygetid en grundig forståelse av hvordan energi lagres, omformes og forbrukes. Selv om den grunnleggende formelen er enkel, krever nøyaktighet i virkeligheten nøye vurdering av batteriets oppførsel, framdriftseffektiviteten, oppgavens dynamikk, miljøpåvirkninger og lastens egenskaper. Ved å kombinere teoretisk modellering med empirisk testing og dataanalyse kan ingeniører forutsi flygetiden med tillit og optimere droner for de mange ulike oppgavene de er designet for. Driftstid er ikke bare en spesifikasjon; den speiler dronens generelle designkvalitet og operasjonelle klarhet.
