
Dronen ilmalla pysymisen keston ennustaminen saattaa vaikuttaa yksinkertaiselta tehtävältä, joka voidaan suorittaa luettelemalla valmistajan teknisiä tietoja, mutta käytännössä se on yksi hienovaraisimmista laskuista lentokoneiden ohjaamattomien ilmajärjestelmien alalla. Lentoaika ei ole kiinteä ominaisuus, vaan se syntyy sähköisten, mekaanisten, aerodynamiikkaan liittyvien ja ympäristötekijöiden vuorovaikutuksesta. Insinöörit, lentäjät ja tutkijat kaikki luottavat tarkkoihin kestolaskelmiin tehtävien suunnitteluun, propulsiojärjestelmien suunnitteluun ja akuteknologioiden arviointiin. Siksi dronen lentoaikaa laskettaessa on otettava huomioon drone kokonaisuutena energianmuuntajana eikä pelkästään erillisistä komponenteista koostuvana laitteena.
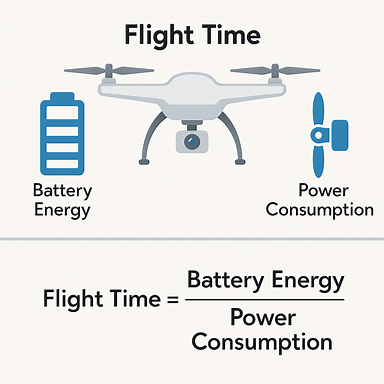
Laskelman ytimessä on suhde varastoitua energiaa ja sähkönkulutus dronen akku toimii kemiallisen energian varastona, joka muunnetaan sähköenergiaksi ja sen jälkeen mekaaniseksi työntövoimaksi. Lentoaika riippuu siitä, kuinka nopeasti tämä varasto tyhjenee. Vaikka perusperiaate muistuttaa perinteisten lentokoneiden polttoainekulutusmallia, sähkötoiminen propulsio tuo mukanaan ainutlaatuisia ominaisuuksia, kuten jännitteen laskua, epälineaarisia purkukäyriä ja lämpötilasta riippuvaa suorituskykyä. Nämä tekijät tekevät kestolentoaikojen arvioinnista sekä teknisesti mielenkiintoisen että toiminnallisesti kriittisen tehtävän.
Aloittaakseen on määritettävä, kuinka paljon energiaa dronin akussa on käytettävissä. Useimmat kuluttaja- ja ammattimaiset dronit käyttävät litium-polymeeri- (LiPo) tai litium-ioniakkeja (Li-ion), joiden kapasiteetit ilmoitetaan yleensä milliamppituntina. Kapasiteetti kuitenkin yksin ei määritä energiaa; myös jännitteen on otettava huomioon. Akun kokonaismääräinen energia saadaan kertomalla sen kapasiteetti nimellisjännitteellä, ja se ilmoitetaan watteina tunnissa. Tämä muunnos on välttämätön, koska tehonkulutus mitataan watteina ja kestoikä on lopulta watteina tunnissa ilmoitetun energian suhde watteihin. Edes tämä muunnos ei kuitenkaan kokonaan kuvaile reaalimaailman käyttäytymistä. Akut harvoin toimittavat koko ilmoitettua kapasiteettaan sisäisen vastuksen, ikääntymisen ja minimijännitteen turvallisuusrajoitusten vuoksi. Siksi insinöörit käyttävät usein ”käytettävissä olevaa energiaa”, joka on alakorjattu arvo ja joka heijastaa käytännön rajoituksia pikemminkin kuin laboratoriomittauksissa saatuja teknisiä tietoja.
Kun saatavilla oleva energia on ymmärretty, huomio kääntyy dronin tehonkulutukseen. Monirotooriplatformoissa eteenpäin liikuttaminen aiheuttaa suurimman osan energian kulutuksesta. Jokaisen moottorin on tuotettava riittävästi nostovoimaa vastustaakseen dronin painoa, ja tämän nostovoiman tuottamiseen vaadittava teho kasvaa nopeasti kuorman kasvaessa. Nostovoiman ja tehon välinen suhde määräytyy potkureiden aerodynamiikan ja moottorin hyötysuhteen perusteella, jotka molemmat vaihtelevat pyörimisnopeuden mukaan. Droni, joka leijuu mukavalla kaasutasolla, kuluttaa huomattavasti vähemmän tehoa kuin droni, joka toimii lähellä maksiminostovoimansa rajaa. Siksi lisäkuorman, vaikka pienikin, lisääminen voi huomattavasti vähentää lentoaikaa: se siirtää eteenpäin liikuttamisjärjestelmän vähemmän tehokkaaseen toiminta-alueeseen.
Kohtalaisen keston arviointiin käytetään usein kellumistehoa perustana, koska se edustaa tasapainotilaa. Kellumisvirran ja -jännitteen mittaaminen antaa suoran arvion tehonkulutuksesta. Todelliset tehtävät kuitenkin harvoin koostuvat pelkästään kellumisesta. Etenevä lentäminen, nousu, jarrutus ja liikkuminen aiheuttavat moottoreihin dynaamisia kuormia. Tuuli lisää lisämuuttuvuutta ja voi joskus lisätä tehonkulutusta merkittävästi. Tästä syystä pelkästään kellumistiedoista lasketut kestomittaukset ovat yleensä liian optimistisia. Tarkemmat ennusteet vaativat ymmärrystä siitä, miten teho vaihtelee koko tehtäväprofiilin aikana.
Tehtäväperäinen mallinnus jakaa lennon osiin—lähtöön, nousuun, matkustuslentoonsa, laskeutumiseen ja laskeutumiseen—ja määrittää kullekin osalle tehoarvon. Lähtö ja nousu vaativat yleensä suurimman tehon, kun taas laskeutuminen voi vaatia hyvin vähän tehoa. Matkustuslennon teho riippuu ilmanopeudesta, aerodynaamisesta vastuksesta ja translaatiolennosta aiheutuvasta nostovoimasta. Monirotooridroonit kokevat eteenpäin suuntautuvassa lennossa lievän tehon alenemisen, koska ilmavirta potkureiden läpi tulee tehokkaammaksi, mutta tämä etu kompensoituu usein ilmakappaleen ja kuorman aiheuttaman lisääntyneen vastuksen takia. Painottamalla kutakin osaa sen keston mukaan insinöörit voivat laskea keskimääräisen tehoarvon, joka heijastaa paremmin käytännön toimintaa.
Ympäristöolosuhteet vaikeuttavat lisää kestoaika-arvioiden tekemistä. Ilman tiukkuus pienenee korkeuden ja lämpötilan myötä, mikä vähentää potkurin tehokkuutta ja pakottaa moottorit pyörimään nopeammin säilyttääkseen työntövoiman. Kylmä sää heikentää akun suorituskykyä hidastamalla kemiallisia reaktioita, kun taas kuumuus lisää lämpökuormitusta moottoreihin ja sähköisiin nopeussäätimiin. Tuuli vaikuttaa erityisen voimakkaasti: vastatuuli voi tuplata tehonkulutuksen, kun taas tuuli takana voi vähentää sitä. Koska ympäristöolosuhteiden vaihtelu on välttämätöntä, kestoaika-laskelmissa otetaan usein huomioon turvamarginaali, jotta dronella on varmuus pystyä palautumaan kotiin myös huononevissa olosuhteissa.
Toinen tärkeä tekijä on akun oma kunto. Ajan myötä toistuvat lataus- ja purkukerrat heikentävät akun sisäistä kemiallista koostumusta, mikä lisää vastusta ja vähentää kapasiteettia. Tämä rappeutuminen ilmenee jännitteen laskuna kuormituksen alla, mikä voi aiheuttaa alajännitevaroitusten liian aikaisen käynnistymisen ja lyhentää lentoaikaa. Akun kunnon seuraaminen sisäisen vastuksen mittauksin ja kiertomäärillä mahdollistaa käyttäjille suorituskyvyn heikkenemisen ennakoimisen ja akkujen vaihtamisen ennen kuin ne muuttuvat epäluotettaviksi. Pitkän aikavälin laivaston hallinnassa akkujen ikääntymisen seuraaminen on yhtä tärkeää kuin lentoaikojen laskeminen.
Hyötykuorman ominaisuudet vaikuttavat myös lentokoneen kestoon tavoin, jotka ulottuvat painon yli. Monet ammattimaiset hyötykuormat—kuten LiDAR-skannerit, monispektrikamerat ja viestintämoduulit—ottavat sähkötehon lennokin akusta. Tämä apukulutus on lisättävä propulsioon liittyvään tehonkulutukseen, kun arvioidaan kokonaissähkönkulutusta. Hyötykuorma, joka ottaa 20 watin tehon, saattaa vaikuttaa merkityksettömältä, mutta 30 minuutin lennon aikana se kuluttaa 10 watintuntia, mikä voi vähentää lentoaikaakin useilla minuuteilla. Insinöörien on siis otettava huomioon sekä hyötykuorman mekaaniset että sähköiset vaikutukset, kun lasketaan lentokoneen kestoa.
Potkuriyksikön valinnalla on yllättävän suuri merkitys lentoaikaa optimoitaessa. Suuremmat potkurit, joilla on alhaisempi kierre, ovat yleensä tehokkaampia tuottaessaan työntövoimaa alhaisilla pyörimisnopeuksilla, mikä tekee niistä ideaalisia kestolentoihin keskittyville dronelle. Pienemmät, korkeakierroksiset potkurit tuottavat enemmän työntövoimaa korkeilla nopeuksilla, mutta ne ovat vähemmän tehokkaita kellumisessa. Potkurin ominaisuuksien sovittaminen tehtävän vaatimuksiin voi tuoda huomattavia parannuksia lentoaikaan. Samoin moottorin KV-luku – eli kierrosluku volttia kohden – vaikuttaa tehokkuuteen. Alhaisen KV-luvun moottorit, jotka on yhdistetty suuriin potkureihin, tarjoavat usein paremman keston, koska ne toimivat tehokkaasti alhaisemmillä kierroksilla.
Kestävyysennusteiden tarkentamiseksi insinöörit luottavat usein empiiriseen testaamiseen. Työntömittausasemat tarjoavat yksityiskohtaisia mittauksia työntövoimasta, virrasta, jännitteestä ja hyötysuhteesta tietyille moottori–potkuriyhdistelmille. Nämä tiedot mahdollistavat suorituskykykäyrien laatimisen, joissa kuvataan tehonkulutuksen riippuvuus työntövoimasta. Kun droneen kuuluvan painon tuntee, voidaan määrittää kullekin moottorille vaadittava työntövoima ja lukea vastaava tehoarvo käyrältä. Tämä menetelmä on huomattavasti tarkempi kuin valmistajan teknisten tietojen tai yksinkertaisten leijumismittausten käyttö.
Modernit dronit tuottavat myös laajaa telemetria-arkistoa, joka tallentaa virta-, jännite-, kaasukäsky- ja moottorikierroslukutiedot koko lennon ajan. Näiden arkistojen analysointi antaa tietoa siitä, miten tehonkulutus vaihtelee todellisissa olosuhteissa. Ajan mittaan käyttäjät voivat rakentaa ennakoivia malleja, jotka on tehty erityisesti heidän droniinsa, kuormaansa ja tehtävätyyppiinsä. Jotkin edistyneet järjestelmät käyttävät jopa koneoppimista lennon keston ennustamiseen historiallisten tietojen, ympäristötekijöiden ja tehtäväparametrien perusteella.
Vaikka nämä tekijät ovat monimutkaisia, peruslaskenta pysyy kuitenkin elegantisti yksinkertaisena: lentoaika on käytettävissä oleva energia jaettuna keskimääräisellä tehonkulutuksella. Haastetta aiheuttavat näiden kahden arvon tarkka määrittäminen. Käytettävissä oleva energia riippuu akun kemiallisesta koostumuksesta, lämpötilasta, ikääntymisestä ja purkamisrajoituksista. Keskimääräinen tehonkulutus puolestaan riippuu painosta, aerodynamiikasta, propulsiojärjestelmän hyötysuhteesta, lentoajan dynamiikasta ja ympäristöolosuhteista. Järjestelmällisesti analysoimalla jokainen tekijä insinöörit voivat tuottaa erinomaisen luotettavia kestolentoesimerkkejä.
Ammatillisissa toiminnoissa kestoaikakuvauksen arviointi ei ole pelkästään tekninen tehtävä, vaan se on turvallisuusvaatimus. Sääntelykehykset vaativat usein, että lennokit säilyttävät varavirtaa odottamattomia tapahtumia varten, kuten tuulen muutoksia tai hätälaskuja. Tarkka lentoaikaprognostika varmistaa noudattamisen näitä säännöksiä ja vähentää ilmalla tapahtuvan virransyötön riskiä. Kaupallisissa sovelluksissa, kuten kartografioinnissa, tarkastuksissa ja toimituksissa, kesto vaikuttaa suoraan tuottavuuteen ja kustannustehokkuuteen. Lennokin, joka voi pysyä ilmassa muutama minuutti pidempään, voi kattaa huomattavasti suuremman alueen tai suorittaa lisätehtäviä kussakin tehtävässä.
Tulevaisuudessa akkuteknologian edistysaskeleet lupaavat muokata kestoaika-laskelmia. Litium-rikki-, kiinteän tilan ja korkean piisisältöisen anodin akut tarjoavat suurempaa energiatiukkuutta kuin nykyiset litium-polymeeri- ja litium-ionikemiat. Vedyn polttokennot ja hybridivoimajärjestelmät tarjoavat vaihtoehtoisia ratkaisuja pidemmille lentoaikoille, erityisesti suurille dronelle. Kun nämä teknologiat kypsyvät, kestoaikaan käytetyt laskentamenetelmät kehittyvät, mutta energian ja tehon periaatteet säilyvät keskiössä.
Yhteenvetona voidaan todeta, että dronien lentoaikojen laskeminen edellyttää kattavaa ymmärrystä siitä, miten energiaa varastoidaan, muunnetaan ja kulutetaan. Vaikka peruskaava on suoraviivainen, käytännön tarkkuus vaatii huolellista huomiota akun käyttäytymiseen, propulsiojärjestelmän tehokkuuteen, tehtävän dynamiikkaan, ympäristötekijöihin ja kuorman ominaisuuksiin. Teoreettisen mallinnuksen, empiirisen testauksen ja tietoanalyysin yhdistelmällä insinöörit voivat ennustaa lentoaikaa luotettavasti ja optimoida droneja niille monimuotoisille tehtäville, joihin ne on suunniteltu. Lentokesto ei ole pelkkä tekninen erityisominaisuus; se heijastaa dronin kokonaissuunnittelun laatua ja toimintavalmiutta.
