
Bir dronun havada ne kadar süre kalabileceğini tahmin etmek, bir üreticinin teknik özellik sayfasını okumak kadar basit bir iş gibi görünebilir; ancak uygulamada bu, insansız hava sistemleri alanında en ince ayrıntılara dayalı hesaplamalardan biridir. Uçuş süresi sabit bir özellik değil; elektriksel, mekanik, aerodinamik ve çevresel etkileşimlerin ortaya çıkardığı bir sonuçtur. Mühendisler, pilotlar ve araştırmacılar, görev planlaması yapmak, itki sistemleri tasarlamak ve pil teknolojilerini değerlendirmek amacıyla doğru dayanıklılık tahminlerine güvenmektedirler. Dolayısıyla bir dronun uçuş süresini nasıl hesaplayacağımızı anlamak, dronu izole bileşenler topluluğu olarak değil, bir enerji-dönüştürme sistemi olarak bütüncül bir bakış açısıyla ele almamızı gerektirir.
Hesaplamanın merkezinde yatan ilişki, depolanan enerjiyle ve güç Tüketimi bir dronun bataryası, kimyasal enerjinin bir rezervuarı olarak işlev görür; bu enerji önce elektrik enerjisine, ardından mekanik itkiye dönüştürülür. Uçuş süresi, bu rezervuarın ne kadar hızlı tükenmesine bağlıdır. Temel prensip geleneksel uçakların yakıt tüketimi modeline benzer olsa da elektrikli tahrik sistemi, gerilim düşüşü, doğrusal olmayan deşarj eğrileri ve sıcaklığa bağlı performans gibi özgün özellikler sunar. Bu faktörler, uçuş süresi tahminini hem teknik açıdan ilginç hem de operasyonel açıdan kritik kılar.
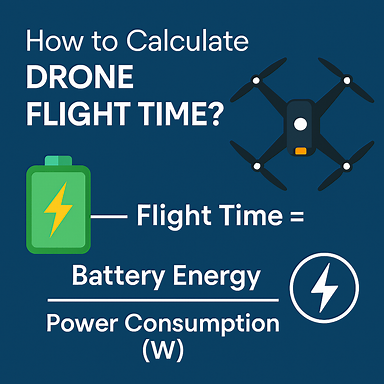
Öncelikle, bir dron pilindeki kullanılabilir enerji nicelendirilmelidir. Çoğu tüketici ve profesyonel dron, kapasiteleri genellikle miliamper-saat cinsinden ifade edilen lityum-polimer (LiPo) veya lityum-iyon (Li-ion) piller kullanır. Ancak yalnızca kapasite enerjiyi belirlemez; aynı zamanda gerilim de dikkate alınmalıdır. Bir pilin toplam enerjisi, kapasitesi ile nominal geriliminin çarpımına eşittir ve watt-saat cinsinden ifade edilir. Bu dönüştürme, güç tüketiminin watt cinsinden ölçülmesi ve uçuş süresinin (dayanıklılığın) nihayetinde watt-saatin watt’a oranı olarak tanımlanması nedeniyle hayati öneme sahiptir. Yine de bu dönüştürme gerçek dünya davranışını tam olarak yansıtmaz. Piller, iç dirençleri, yaşlanmaları ve minimum gerilim üzerindeki güvenlik sınırlamaları nedeniyle nadiren tam nominal kapasitelerini sağlarlar. Sonuç olarak mühendisler, laboratuvar spesifikasyonları yerine pratik kısıtlamaları yansıtan bir "kullanılabilir enerji" kavramıyla, yani azaltılmış bir değerle çalışırlar.
Mevcut enerji miktarı anlaşıldıktan sonra dikkat, dronun güç tüketimine yönelir. Çokrotorlu platformlar için itiş sistemi, enerji kullanımının büyük çoğunluğunu oluşturur. Her bir motor, dronun ağırlığını dengeleyecek kadar kaldırma kuvveti üretmelidir ve bu kaldırma kuvvetini üretmek için gereken güç, yük arttıkça hızla artar. Kaldırma kuvveti ile güç arasındaki ilişki, pervane aerodinamiği ve motor verimliliği tarafından belirlenir; bu iki faktör de devir sayısına göre değişir. Rahat bir gaz seviyesinde havada sabitlenen bir dron, maksimum kaldırma kapasitesine yakın çalışırken tüketilen güçten önemli ölçüde daha az güç tüketir. Bu nedenle, yük eklemeleri —hatta küçük olanları bile— uçuş süresini belirgin şekilde azaltabilir: çünkü bu durum, itiş sistemini daha az verimli bir çalışma bölgesine zorlar.
Sürekli uçuş gücü, genellikle bir kararlı durumu temsil ettiğinden, kullanım süresi tahmini için bir temel olarak kullanılır. Sürekli uçuş akımı ve geriliminin ölçülmesi, güç tüketimi hakkında doğrudan bir tahmin sağlar. Ancak gerçek görevler nadiren saf sürekli uçuştan oluşur. İleri yönde uçuş, tırmanma, frenleme ve manevra yapma gibi işlemler motorlara dinamik yükler uygular. Rüzgâr, ekstra değişkenlik getirir ve bazen güç tüketimini önemli ölçüde artırır. Bu nedenle yalnızca sürekli uçuş verilerine dayalı kullanım süresi hesaplamaları genellikle iyimser sonuçlar verir. Daha doğru tahminler, bir görev profili boyunca gücün nasıl dalgalandığını anlama gerektirir.
Görev tabanlı modelleme, bir uçuşu segmentlere—kalkış, tırmanış, seyir, iniş ve iniş—bölerek her birine bir güç değeri atar. Kalkış ve tırmanış genellikle en yüksek gücü gerektirirken, iniş çok az güç gerektirebilir. Seyir gücü, hava hızına, aerodinamik sürtünmeye ve öteleme kaldırma kuvvetine bağlıdır. Çokrotor dronlar, pervanelerden geçen hava akımının daha verimli hâle gelmesi nedeniyle ileri yönde uçuş sırasında güçte küçük bir azalma yaşar; ancak bu avantaj, genellikle gövde ve yükten kaynaklanan artan sürtünme tarafından telafi edilir. Her segmentin süresine göre ağırlıklandırılmasıyla mühendisler, operasyonel gerçekliği daha iyi yansıtan ortalama bir güç değeri hesaplayabilirler.
Çevresel koşullar, dayanıklılık tahminini daha da karmaşık hale getirir. Hava yoğunluğu, yükseklik ve sıcaklıkla birlikte azalır; bu da pervane verimini düşürür ve itme gücünü korumak için motorların daha hızlı dönmesini zorunlu kılar. Soğuk hava, kimyasal reaksiyonları yavaşlatarak pil performansını azaltırken, sıcak hava motorlar ve elektronik hız kontrol cihazları üzerinde termal stresi artırır. Rüzgâr özellikle etkili bir faktördür: güçlü bir karşı rüzgâra karşı uçmak enerji tüketimini iki katına çıkarabilirken, rüzgârı arkada bırakarak uçmak tüketimi azaltabilir. Çevresel değişkenliğin kaçınılmaz olması nedeniyle, dayanıklılık hesaplamaları genellikle drone’un kötüleşen koşullar altında bile eve dönebilmesini sağlamak amacıyla bir güvenlik payı içerir.
Başka bir önemli faktör, pilin kendisinin sağlığıdır. Zamanla tekrarlanan şarj-deşarj döngüleri, pilin iç kimyasını bozar; bu da direnci artırır ve kapasiteyi azaltır. Bu bozulma, yük altında gerilim düşüşü şeklinde kendini gösterir ve düşük gerilim uyarılarını erken tetikleyebilir, uçuş süresini kısaltabilir. Pil sağlığının izlenmesi, iç direnç ölçümleri ve döngü sayısı takibi yoluyla yapılır; bu sayede operatörler performans düşüşünü önceden tahmin edebilir ve pilleri güvenilirliklerini kaybetmeden önce değiştirebilirler. Uzun vadeli filo yönetimi açısından pil yaşlanmasının takibi, uçuş süresinin hesaplanması kadar önemlidir.
Yük özelliklerinin menzil üzerindeki etkisi, yalnızca ağırlık ötesine de uzanır. LiDAR tarayıcılar, çokspektrumlu kameralar ve iletişim modülleri gibi birçok profesyonel yük, dronun pilinden elektrik enerjisi çeker. Bu yardımcı enerji tüketimi, toplam enerji kullanımını tahmin ederken itiş gücüne eklenmelidir. 20 watt çekimi yapan bir yük önemsiz görünebilir; ancak 30 dakikalık bir görev süresince bu yük 10 watt-saat enerji tüketir ve uçuş süresini birkaç dakika azaltabilir. Dolayısıyla mühendisler, menzili hesaplarken yüklerin mekanik ve elektriksel etkilerini birlikte değerlendirmelidir.
Propeller seçimi, uçuş süresi optimizasyonunda şaşırtıcı derecede büyük bir rol oynar. Daha düşük bıçak açısıyla (pitch) üretilen daha büyük propellerler, düşük devir hızlarında itki üretmede daha verimlidir ve bu nedenle dayanıklılığa odaklanan dronlar için idealdir. Daha küçük, yüksek bıçak açısıyla üretilen propellerler ise yüksek hızlarda daha fazla itki üretir ancak asılı kalma (hovering) açısından daha az verimlidir. Propeller özelliklerini görev gereksinimlerine uygun şekilde eşleştirmek, uçuş süresinde önemli iyileşmeler sağlayabilir. Benzer şekilde, motor KV değeri—yani volt başına dönüş sayısı—de verimliliği etkiler. Büyük propellerlerle birlikte kullanılan düşük KV’li motorlar, genellikle daha düşük devirde verimli çalıştıkları için üstün dayanıklılık sağlar.
Dayanıklılık tahminlerini iyileştirmek için mühendisler genellikle ampirik testlere dayanır. İtme standları, belirli motor-pervane kombinasyonları için itme, akım, gerilim ve verim gibi parametreleri ayrıntılı olarak ölçer. Bu veriler, mühendislerin güç tüketimi ile itme çıktısı arasındaki ilişkiyi gösteren performans eğrileri oluşturmasını sağlar. Drone’un ağırlığı bilindiğinde, her bir motora gerekli itme değeri belirlenebilir ve bu itme değerine karşılık gelen güç değeri eğriden okunabilir. Bu yöntem, üretici teknik özelliklerine veya basit süzülme (hover) ölçümlerine güvenmeye kıyasla çok daha doğrudur.
Modern dronlar ayrıca uçuş sırasında akım, gerilim, gaz konumu ve motor devir sayısını (RPM) kaydeden kapsamlı telemetri günlükleri oluşturur. Bu günlüklerin analizi, güç tüketiminin gerçek koşullar altında nasıl değiştiğine dair içgörüler sağlar. Zamanla operatörler, belirli dronlarına, yüklerine ve görev türlerine özel tahmine dayalı modeller geliştirebilirler. Bazı gelişmiş sistemler, geçmiş verilere, çevresel girişlere ve görev parametrelerine dayalı olarak uçuş süresini tahmin etmek için makine öğrenimi bile kullanır.
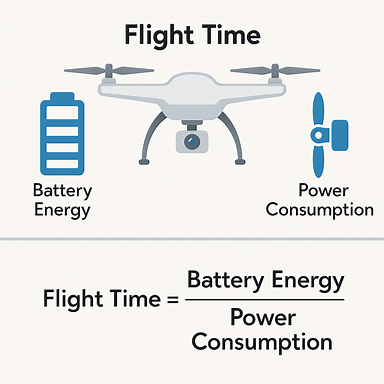
Bu faktörlerin karmaşıklığına rağmen temel hesaplama son derece zarif bir şekilde basittir: Uçuş süresi, kullanılabilir enerjinin ortalama güç tüketimine bölünmesine eşittir. Zorluk, bu iki değeri doğru bir şekilde belirlemekte yatar. Kullanılabilir enerji, pil kimyası, sıcaklık, yaşlanma ve deşarj sınırlarına bağlıdır. Ortalama güç tüketimi ise ağırlık, aerodinamik, tahrik verimliliği, görev dinamikleri ve çevresel koşullara bağlıdır. Her faktörü sistematik olarak analiz ederek mühendisler, oldukça güvenilir dayanıklılık tahminleri üretebilir.
Profesyonel operasyonlarda dayanıklılık tahmini, sadece teknik bir uygulama değil; aynı zamanda bir güvenlik gereksinimidir. Düzenleyici çerçeveler, dronların rüzgâr değişiklikleri veya acil iniş gibi beklenmedik olaylar için yedek enerji tutmalarını genellikle zorunlu kılar. Doğru uçuş süresi tahmini, bu düzenlemelere uyum sağlanması ve havada güç kaybı riskinin azaltılması açısından kritik öneme sahiptir. Haritalama, denetim ve teslimat gibi ticari uygulamalarda dayanıklılık, doğrudan verimlilik ve maliyet verimliliğini etkiler. Bir dronun uçuş süresinin yalnızca birkaç dakika daha uzaması, görev başına önemli ölçüde daha fazla alan kapsamasına veya ek görevler tamamlamasına olanak tanıyabilir.
Geleceğe baktığımızda, pil teknolojisindeki ilerlemeler, uçuş süresi hesaplamalarını yeniden şekillendirmeyi vaat ediyor. Lityum-kükürt, katı hal ve yüksek silikon anotlu piller, mevcut LiPo ve lityum-iyon kimyasallarına kıyasla daha yüksek enerji yoğunlukları sunuyor. Hidrojen yakıt hücreleri ve hibrit güç sistemleri, özellikle büyük dronlar için uzun uçuş sürelerine ulaşmak amacıyla alternatif çözümler sağlıyor. Bu teknolojiler olgunlaştıkça, uçuş süresi hesaplama yöntemleri de gelişecek; ancak temelde yatan enerji ve güç ilkeleri merkezde kalmaya devam edecek.
Özetle, bir dronun uçuş süresini hesaplamak, enerjinin nasıl depolandığını, dönüştürüldüğünü ve tüketildiğini kapsamlı bir şekilde anlama gerektirir. Temel formül basit olsa da gerçek dünya koşullarında doğruluk elde etmek, pil davranışının, tahrik verimliliğinin, görev dinamiklerinin, çevresel etkilerin ve yük özelliklerinin dikkatli bir şekilde değerlendirilmesini gerektirir. Teorik modelleme ile ampirik test ve veri analizini birleştirerek mühendisler, uçuş süresini güvenle tahmin edebilir ve dronları tasarlandıkları çeşitli görevler için optimize edebilirler. Uçuş süresi (dayanıklılık), yalnızca bir teknik özellik değildir; aynı zamanda dronun genel tasarım kalitesinin ve operasyonel hazır durumunun bir yansımasıdır.
