
ドローンが空中に滞在できる時間を予測することは、単にメーカーの仕様書を読むだけのように一見単純に思えるが、実際には無人航空機システム(UAS)分野において最も繊細で多面的な計算の一つである。飛行時間は固定された特性ではなく、電気的・機械的・空力的・環境的な要因が相互作用して生じる「出現的」な結果である。エンジニア、操縦士、研究者らは、ミッション計画の立案、推進システムの設計、およびバッテリ技術の評価のために、正確な航続時間(エンドゥランス)の推定に依拠している。したがって、ドローンの飛行時間を算出する方法を理解するには、ドローンを個別の部品の集合体ではなく、エネルギー変換システムとして包括的に捉える視点が不可欠である。
この計算の核心にあるのは、 蓄電したエネルギー と 消費電力 ドローンのバッテリーは化学エネルギーの貯蔵庫として機能し、その化学エネルギーが電気エネルギーに変換され、さらに機械的推力に変換されます。飛行時間は、この貯蔵庫がどの程度の速さで消費されるかに依存します。基本的な原理は従来の航空機における燃料消費モデルと類似していますが、電動推進システムでは電圧降下(ボルテージ・サグ)、非線形放電特性、温度依存性の性能といった特有の特性が現れます。これらの要因により、航続時間の推定は技術的に興味深く、かつ運用上極めて重要となります。
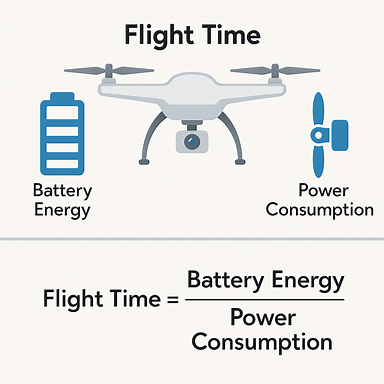
まず、ドローンのバッテリーに供給可能なエネルギーを定量化する必要があります。ほとんどの民生用および業務用ドローンはリチウムポリマー(LiPo)またはリチウムイオン(Li-ion)電池パックを採用しており、その容量は通常ミリアンペア時(mAh)で表されます。しかし、容量だけではエネルギー量を決定することはできません。電圧も同時に考慮する必要があります。バッテリーの全エネルギー量は、その容量と公称電圧の積であり、ワット時(Wh)で表されます。この換算は不可欠です。なぜなら、消費電力はワット(W)で測定され、飛行持続時間(エンデュランス)は最終的に「ワット時 ÷ ワット」の比として算出されるからです。しかしながら、この換算でも実際の使用状況を完全には反映できません。内部抵抗、経年劣化、および最低動作電圧に関する安全制限などの要因により、バッテリーはその公称容量をほぼ常に満たして放電することができません。このため、技術者はしばしば「実用可能エネルギー」と呼ばれる減額値を用いて設計・評価を行います。これは、実験室環境下での仕様ではなく、現実的な制約条件を反映した値です。
利用可能なエネルギーが把握された後、次に注目すべきはドローンの電力消費です。マルチローター型プラットフォームでは、推進システムがエネルギー消費の圧倒的大部分を占めます。各モーターは、ドローンの重量を打ち消すのに十分な推力を生成する必要がありますが、この推力を生み出すために必要な電力は、負荷が増加するにつれて急激に増大します。推力と電力の関係は、プロペラの空力特性およびモーターの効率によって規定されており、これら両者は回転速度に応じて変化します。快適なスロットル設定でホバリングしているドローンは、最大推力限界付近で動作しているドローンと比べて、著しく少ない電力を消費します。そのため、ペイロードの追加——たとえわずかなものであっても——は飛行時間を明確に短縮する原因となります。これは、ペイロードの追加により推進システムが効率の低い動作領域へと押し込まれるためです。
ホバーパワーは、定常状態を表すため、耐久性(航続時間)の推定における基準値としてしばしば用いられます。ホバー時の電流および電圧を測定することで、消費電力の直接的な推定値が得られます。しかし、実際のミッションは純粋なホバーのみで構成されるケースは稀です。前進飛行、上昇、減速、機動飛行などはすべてモーターに動的負荷を課します。また、風も追加的な変動要因となり、場合によっては消費電力を著しく増加させます。このため、ホバーデータのみに基づく耐久性計算は楽観的になりがちです。より正確な予測を行うには、ミッションプロファイル全体における消費電力の変動パターンを理解する必要があります。
ミッションベースのモデリングでは、飛行を離陸、上昇、巡航、下降、着陸というセグメントに分割し、それぞれに電力値を割り当てます。離陸および上昇段階では通常、最も高い電力が要求され、下降段階ではごくわずかな電力しか必要としない場合があります。巡航時の電力は、空速、空気抵抗、および推進揚力に依存します。マルチローター型ドローンでは、前進飛行中にプロペラへの気流がより効率的になるため、電力消費がやや減少しますが、この利点は機体およびペイロードによる空気抵抗の増加によってしばしば相殺されます。各セグメントの所要時間を重み付けとして用いることで、エンジニアは実際の運用状況により近い平均電力値を算出できます。
環境条件は、飛行持続時間の推定をさらに複雑にします。空気密度は高度および気温の上昇とともに低下し、プロペラの効率が低下するため、推力を維持するためにモーターの回転数を上げる必要があります。寒い気候では、化学反応が遅くなるためバッテリー性能が低下します。一方、暑い気候では、モーターや電子式スピードコントローラーへの熱的ストレスが増大します。風の影響は特に顕著で、強い向かい風の中での飛行では消費電力が2倍になる場合があり、追い風の中では逆に消費電力が減少することもあります。環境変動は避けられないため、飛行持続時間の計算には通常、悪化した条件下でもドローンが基地へ帰還できるよう、安全マージンが含まれます。
もう1つの重要な要因は、バッテリー自体の状態です。時間の経過とともに、充電・放電を繰り返すことでバッテリー内部の化学反応が劣化し、内部抵抗が増加し、容量が低下します。このような劣化は負荷時の電圧降下(ボルトサグ)として現れ、低電圧警告を過早に発動させ、飛行時間を短縮させる可能性があります。内部抵抗の測定値や充放電サイクル数を用いてバッテリーの状態を監視することで、運用者は性能の低下を事前に予測し、信頼性が損なわれる前にバッテリーを交換できます。長期的な機隊管理においては、バッテリーの経年劣化を追跡することは、飛行時間の算出と同様に重要です。
積載物の特性は、重量を超えて航続時間を左右する要因でもあります。LiDARスキャナー、マルチスペクトルカメラ、通信モジュールなど、多くのプロフェッショナル向け積載物は、ドローンのバッテリーから電力を供給されています。この付加的な電力消費は、総エネルギー使用量を推定する際に推進用電力に加算する必要があります。20ワットの電力を消費する積載物は、一見すると微小に思えるかもしれませんが、30分間のミッションでは10ワット時(Wh)を消費し、これにより飛行時間は数分短縮される可能性があります。したがって、エンジニアは航続時間の算出に際して、積載物による機械的影響と電気的影響の両方を考慮しなければなりません。
プロペラの選定は、飛行時間の最適化において意外に大きな役割を果たします。ピッチが低く、直径が大きいプロペラは、低回転速度で推力を発生させる際により効率的であり、長時間飛行を重視したドローンに最適です。一方、直径が小さくピッチが高いプロペラは高速域でより大きな推力を生み出しますが、ホバリング時の効率は劣ります。プロペラの特性をミッション要件に合わせることで、飛行時間の大幅な向上が得られます。同様に、モーターのKV値(1ボルトあたりの回転数)も効率に影響を与えます。低KVモーターと大型プロペラを組み合わせると、低回転域で高効率に動作するため、優れた耐久性(ロングエンドュランス)を実現できます。
耐久性の予測精度を高めるために、エンジニアはしばしば実証試験に依拠します。推力スタンドを用いることで、特定のモーター・プロペラ組み合わせについて、推力、電流、電圧、効率の詳細な測定値が得られます。これらのデータをもとに、消費電力と推力出力を対応付けた性能曲線を作成できます。ドローンの重量が分かれば、各モーターに必要な推力を算出し、その値に対応する消費電力(ワット数)を性能曲線から読み取ることが可能です。この手法は、メーカー仕様書や単純なホバリング測定に頼る場合よりもはるかに正確です。
現代のドローンは、飛行中の電流、電圧、スロットル位置、モーター回転数(RPM)などを記録する大規模なテレメトリーログも生成します。これらのログを分析することで、実際の運用条件下における電力消費の変化についての洞察が得られます。長期間にわたり、運用者は自社の特定のドローン、ペイロード、およびミッションタイプに最適化された予測モデルを構築できます。一部の高度なシステムでは、機械学習を用いて、過去のデータ、環境条件、ミッションパラメーターに基づいて飛行時間を予測することさえ可能です。
これらの要因の複雑さにもかかわらず、基本的な計算式は実に簡潔です:飛行時間 = 利用可能なエネルギー ÷ 平均消費電力。課題は、この2つの値を正確に算出することにあります。利用可能なエネルギーは、バッテリーの化学組成、温度、経年劣化、および放電限界に依存します。平均消費電力は、機体重量、空力特性、推進効率、ミッションの動的条件、および環境条件に依存します。各要因を体系的に分析することにより、エンジニアは極めて信頼性の高い航続時間(エンデュランス)推定値を算出できます。
プロフェッショナルな運用において、飛行持続時間の推定は単なる技術的作業ではなく、安全性を確保するための必須要件です。規制枠組みでは、風向きの変化や緊急着陸などの予期せぬ事象に備えて、ドローンが余剰エネルギーを確保することを義務付けている場合が多くあります。正確な飛行時間予測は、こうした規制への適合性を確保し、空中での電源喪失リスクを低減します。マッピング、点検、配送といった商用用途においては、飛行持続時間は生産性およびコスト効率に直接影響を与えます。わずか数分でも長く滞空可能なドローンは、1回のミッションで著しく広いエリアをカバーしたり、追加のタスクを完了したりすることが可能になります。
今後を見据えると、バッテリー技術の進展により、飛行持続時間(エンデュランス)の算出方法が再定義されることが期待されます。リチウム・硫黄電池、全固体電池、高シリコンアノード電池は、現在主流のLiPo(リチウムポリマー)およびLi-ion(リチウムイオン)電池よりも高いエネルギー密度を実現します。また、水素燃料電池やハイブリッド電源システムは、特に大型ドローンにおいて、飛行時間を大幅に延長するための代替的な手段を提供します。これらの技術が実用化・成熟するにつれて、エンデュランスを算出する手法も進化していくでしょう。ただし、その根底にあるエネルギーと電力に関する基本原理は、引き続き中心的な役割を果たし続けます。
要約すると、ドローンの飛行時間の算出には、エネルギーがどのように蓄えられ、変換され、消費されるかについて包括的な理解が必要です。基本的な計算式は単純ですが、実際の状況における精度を確保するには、バッテリーの挙動、推進効率、ミッションのダイナミクス、環境要因、およびペイロードの特性を慎重に検討する必要があります。理論的モデリングと実証的試験およびデータ分析を組み合わせることで、エンジニアは飛行時間を確信を持って予測し、ドローンをその設計目的である多様なミッションに最適化できます。耐久性(エンデュランス)は単なる仕様ではなく、ドローン全体の設計品質および運用準備状況を反映するものです。
