
ड्रोन कति समयसम्म हावामा रहन सक्छ भनेर अनुमान लगाउनु सजिलो काम जस्तो देखिन्छ, जुन निर्माताको विशिष्टता पृष्ठमा हेरेर गर्न सकिन्छ, तर व्यवहारमा यो अनियन्त्रित वायुयान प्रणालीको क्षेत्रमा सबैभन्दा सूक्ष्म गणनाहरू मध्ये एक हो। उडान समय एउटा निश्चित विशेषता होइन, तर विद्युतीय, यान्त्रिक, वायुगतिकीय र वातावरणीय अन्तरक्रियाहरूको एक सामूहिक परिणाम हो। इन्जिनियरहरू, पाइलटहरू र अनुसन्धानकर्ताहरू सबैले मिशन योजना बनाउन, प्रणोदन प्रणाली डिजाइन गर्न र ब्याट्री प्रविधिहरूको मूल्याङ्कन गर्न सही स्थायित्व अनुमानमा निर्भर रहन्छन्। यसैले ड्रोनको उडान समय गणना गर्न कसरी भन्ने कुरा बुझ्नु भनेको ड्रोनलाई एकात्मिक ऊर्जा-परिवर्तन प्रणालीको रूपमा हेर्नु पर्छ, न कि अलग-अलग घटकहरूको संग्रहको रूपमा।
गणनाको केन्द्रमा निम्न सम्बन्ध छ: संग्रहित ऊर्जा र ऊर्जा खपत ड्रोनको ब्याट्री रासायनिक ऊर्जाको एउटा भण्डारको रूपमा काम गर्दछ, जुन विद्युतीय ऊर्जामा र त्यसपछि यान्त्रिक थ्रस्टमा रूपान्तरण हुन्छ। उडानको अवधि यो भण्डार कति छिटो खाली हुन्छ भन्ने माथि निर्भर गर्दछ। यद्यपि मूल सिद्धान्त पारम्परिक विमानहरूको इन्धन-उपभोग मोडेलसँग मिल्दोजुल्दो छ, विद्युतीय प्रणोदनले भोल्टेज स्याग, गैर-रैखिक डिस्चार्ज वक्रहरू, र तापमान-निर्भर प्रदर्शन जस्ता विशिष्ट विशेषताहरू प्रस्तुत गर्दछ। यी कारकहरूले स्थायित्व अनुमान गर्ने कार्यलाई प्राविधिक रूपमा रोचक र संचालनात्मक रूपमा महत्त्वपूर्ण बनाउँछन्।
सुरुमा, ड्रोन ब्याट्रीमा उपलब्ध ऊर्जाको मात्रा निर्धारण गर्नु पर्छ। अधिकांश उपभोक्ता र व्यावसायिक ड्रोनहरू लिथियम-पोलिमर (LiPo) वा लिथियम-आयन (Li-ion) ब्याट्री प्याक प्रयोग गर्छन्, जसको क्षमता सामान्यतया मिलीएम्पियर-घण्टा (mAh) मा व्यक्त गरिन्छ। तर, क्षमता मात्रै ऊर्जा निर्धारण गर्दैन; भोल्टेज पनि विचार गर्नु आवश्यक छ। कुनै ब्याट्रीको कुल ऊर्जा यसको क्षमता र सामान्य भोल्टेजको गुणनफल हुन्छ, जुन वाट-घण्टा (Wh) मा व्यक्त गरिन्छ। यो रूपान्तरण आवश्यक छ किनभने शक्ति खपत वाटमा मापन गरिन्छ र स्थायित्व अन्ततः वाट-घण्टा र वाट बीचको अनुपात हुन्छ। तथापि, यो रूपान्तरण पनि वास्तविक संसारको व्यवहारलाई पूर्ण रूपमा चित्रण गर्दैन। आन्तरिक प्रतिरोध, उमेर बढ्ने र न्यूनतम भोल्टेजमा सुरक्षा सीमा जस्ता कारणहरूले ब्याट्रीहरूले आफ्नो पूर्ण दर्जा गरिएको क्षमता प्रायः दिन्दैनन्। नतिजास्वरूप, इन्जिनियरहरूले प्रायः 'उपयोगी ऊर्जा' सँग काम गर्छन्, जुन एउटा कम गरिएको मान हो जसले प्रयोगात्मक सीमाहरूलाई प्रतिबिम्बित गर्छ, न कि प्रयोगशाला विशिष्टताहरूलाई।
उपलब्ध ऊर्जाको बारेमा एक पटक बुझिएपछि, ध्यान ड्रोनको विद्युत् खपतमा केन्द्रित हुन्छ। बहु-रोटर प्लेटफर्महरूका लागि, प्रणोदन (प्रोपल्सन) ऊर्जा प्रयोगको अधिकांश भाग ओगट्छ। प्रत्येक मोटरले ड्रोनको वजनलाई सन्तुलित गर्न पर्याप्त थ्रस्ट (धक्का) उत्पन्न गर्नुपर्छ, र यो थ्रस्ट उत्पन्न गर्न आवश्यक पावर बोझ बढ्दै जाँदा छिटो बढ्छ। थ्रस्ट र पावर बीचको सम्बन्ध प्रोपेलरको वायुगतिशास्त्र र मोटरको दक्षताद्वारा नियन्त्रित हुन्छ, जुन दुवै घूर्णन गतिसँग परिवर्तनशील हुन्छन्। जुन ड्रोन सुविधाजनक थ्रोटल स्तरमा होभर गर्दैछ, उसले धेरै कम पावर खपत गर्छ भने जुन ड्रोन आफ्नो अधिकतम थ्रस्ट क्षमताको नजिक चलिरहेको छ, उसले धेरै बढी पावर खपत गर्छ। यही कारणले लोड (पेलोड) मा थोरै मात्रै वृद्धि गर्दा पनि उडान समयमा स्पष्ट रूपमा कमी आउँछ: किनभने यसले प्रणोदन प्रणालीलाई कम दक्ष सञ्चालन क्षेत्रमा धकेल्छ।
होभर पावरलाई प्रायः स्थायी अवस्थाको प्रतिनिधित्व गर्ने कारणले टिकाउपनको अनुमानको आधारको रूपमा प्रयोग गरिन्छ। होभर करेन्ट र भोल्टेज मापन गर्दा पावर खपतको सीधा अनुमान प्राप्त हुन्छ। तथापि, वास्तविक मिशनहरूमा सामान्यतया शुद्ध होभरको स्थिति हुँदैन। अगाडि उडान, चढाइ, ब्रेकिङ, र मैनुभरिङ जस्ता सबै क्रियाहरूले मोटरहरूमा गतिशील भार लगाउँछन्। हावा पनि अतिरिक्त परिवर्तनशीलता ल्याउँछ, जसले कहिमा पावर खपत धेरै बढाउन सक्छ। यस कारणले, केवल होभर डाटामा आधारित टिकाउपनका गणनाहरू प्रायः अत्यधिक आशावादी हुन्छन्। अधिक सटीक अनुमानहरूको लागि मिशन प्रोफाइलभर शक्तिको कसरी उतारचढाव हुन्छ भन्ने बारेमा बुझाइ आवश्यक हुन्छ।
मिशन-आधारित मोडेलिङले उडानलाई खण्डहरूमा विभाजन गर्छ—टेकअफ, क्लाइम्ब, क्रुज, डिसेन्ट र ल्याण्डिङ—र प्रत्येक खण्डमा एउटा शक्ति मान निर्धारण गर्छ। टेकअफ र क्लाइम्बले सामान्यतया उच्चतम शक्ति माग गर्छ, जबकि डिसेन्टको लागि धेरै कम शक्ति आवश्यक हुन सक्छ। क्रुज शक्ति वायु गति, वायुगतिकीय घर्षण र अनुवाही उत्थानमा निर्भर गर्दछ। बहु-रोटर ड्रोनहरूमा अगाडि उडान गर्दा शक्तिमा सामान्य घटाउ देखिन्छ किनभने प्रोपेलरहरूमा वायु प्रवाह अधिक कार्यक्षम बन्छ, तर यो फाइदा प्रायः वायुकाय र बोझको कारणले बढेको घर्षणले कम गरिदिन्छ। प्रत्येक खण्डलाई यसको अवधि अनुसार वजन दिएर इन्जिनियरहरूले औसत शक्ति मान गणना गर्न सक्छन् जुन संचालनको वास्तविकतालाई राम्रोसँग प्रतिबिम्बित गर्दछ।
वातावरणीय अवस्थाहरूले उडान समय (एन्ड्योरेन्स) को अनुमान लगाउन अझ जटिल बनाउँछ। हावा को घनत्व उचाइ र तापक्रम सँगै घट्दै जान्छ, जसले प्रोपेलरको कार्यक्षमता घटाउँछ र मोटरहरूलाई थ्रस्ट कायम राख्न अझ छिटो घुमाउन बाध्य पार्छ। चिसो मौसमले रासायनिक प्रतिक्रियाहरू ढिलो पारेर ब्याट्रीको प्रदर्शन घटाउँछ, जबकि गर्म मौसमले मोटरहरू र इलेक्ट्रोनिक स्पिड कन्ट्रोलरहरूमा तापीय तनाव बढाउँछ। हावा विशेष रूपमा प्रभावकारी छ: बलियो विरोधी हावाको विरुद्ध उडान गर्दा शक्ति खपत दोब्बर हुन सक्छ, जबकि पछाडिबाट आउने हावाको साथ उडान गर्दा यो घट्न सक्छ। किनभने वातावरणीय परिवर्तनशीलता अपरिहार्य छ, एन्ड्योरेन्स गणनाहरूमा प्रायः सुरक्षा भाग (सेफ्टी मार्जिन) समावेश गरिन्छ ताकि ड्रोनले अवस्था खराब हुँदा पनि घर फर्कन सकोस्।
अर्को महत्वपूर्ण कारक ब्याट्रीको आफैंको स्वास्थ्य हो। समयको साथ, बारम्बार चार्ज-डिस्चार्ज चक्रहरूले ब्याट्रीको आन्तरिक रसायनशास्त्रलाई क्षीण बनाउँछ, जसले प्रतिरोध बढाउँछ र क्षमता घटाउँछ। यो क्षीणता लोड अन्तर्गत भोल्टेज स्यागको रूपमा प्रकट हुन्छ, जसले निम्न-भोल्टेज चेतावनीहरू अगाडि नै सक्रिय गर्न सक्छ र उडान समय छोटो बनाउँछ। आन्तरिक प्रतिरोध मापन र चक्र गणना मार्फत ब्याट्रीको स्वास्थ्य निगरानी गरेर अपरेटरहरूले प्रदर्शनको कमीको पूर्वानुमान गर्न सक्छन् र ब्याट्रीहरूलाई तिनीहरू विश्वसनीय नबनेसम्म प्रतिस्थापन गर्न सक्छन्। दीर्घकालीन फ्लीट प्रबन्धनका लागि, ब्याट्रीको वार्षिकता ट्र्याक गर्नु उडान समय गणना गर्नु जत्तिकै महत्वपूर्ण छ।
बोक्ने क्षमताका विशेषताहरूले वजनभन्दा बाहिरका क्षेत्रहरूमा पनि उडान समयलाई प्रभावित गर्छन्। धेरै पेशागत बोक्ने क्षमताहरू—जस्तै लाइडार (LiDAR) स्क्यानरहरू, बहु-वर्णकीय क्यामेराहरू, र सञ्चार मोड्युलहरू—ड्रोनको ब्याट्रीबाट विद्युतीय शक्ति आकर्षित गर्छन्। कुल ऊर्जा खपत अनुमान गर्दा यो सहायक खपतलाई प्रणोदन (propulsion) शक्तिसँग थप्नु पर्छ। २० वाट शक्ति आकर्षित गर्ने बोक्ने क्षमता अत्यन्त सामान्य देखिन सक्छ, तर ३० मिनेटको मिशनमा यसले १० वाट-घण्टा ऊर्जा खपत गर्छ, जसले उडान समयलाई केही मिनेटसम्म घटाउन सक्छ। यसैले इन्जिनियरहरूले उडान समय गणना गर्दा बोक्ने क्षमताका यान्त्रिक र विद्युतीय दुवै प्रभावहरूलाई विचार गर्नुपर्छ।
प्रोपेलर छान्ने कामले उडान समय अनुकूलनमा आश्चर्यजनक रूपमा ठूलो भूमिका खेल्छ। कम पिचसँगै ठूला प्रोपेलरहरूले कम घूर्णन गतिमा थ्रस्ट उत्पादन गर्नमा बढी कार्यक्षम हुन्छन्, जसले गर्दा तिनीहरू टिकाउ उडानमा केन्द्रित ड्रोनहरूका लागि आदर्श हुन्छन्। साना, उच्च-पिच प्रोपेलरहरूले उच्च गतिमा बढी थ्रस्ट उत्पादन गर्छन् तर उडान गर्दा स्थिर रहने (हभरिङ) कार्यमा कम कार्यक्षम हुन्छन्। प्रोपेलरका विशेषताहरूलाई मिशनका आवश्यकताहरूसँग मिलाएर उडान समयमा उल्लेखनीय सुधार गर्न सकिन्छ। त्यस्तै, मोटरको KV रेटिङ—प्रति भोल्टमा घूर्णनको संख्या—ले पनि कार्यक्षमतामा प्रभाव पार्छ। ठूला प्रोपेलरहरूसँग जोडिएका कम-KV मोटरहरूले प्रायः उत्कृष्ट टिकाउ उडान प्रदान गर्छन् किनकि तिनीहरू कम RPM मा कार्यक्षम रूपमा सञ्चालित हुन्छन्।
सहनशक्ति अनुमानहरूलाई सुधार्न, इन्जिनियरहरू प्रायः प्रायोगिक परीक्षणमा निर्भर हुन्छन्। थ्रस्ट स्ट्याण्डहरूले विशिष्ट मोटर-प्रोपेलर संयोजनहरूका लागि थ्रस्ट, वर्तमान, भोल्टेज र दक्षताका विस्तृत मापनहरू प्रदान गर्छन्। यी डाटाहरूले इन्जिनियरहरूलाई शक्ति खपतलाई थ्रस्ट उत्पादनसँग सम्बन्धित गर्ने प्रदर्शन वक्रहरू निर्माण गर्न सक्षम बनाउँछन्। ड्रोनको वजन थाहा भएमा, प्रत्येक मोटरको आवश्यक थ्रस्ट निर्धारण गर्न सकिन्छ र वक्रबाट सम्बन्धित शक्ति मान पढ्न सकिन्छ। यो विधि निर्माताका विशिष्टताहरूमा निर्भर हुनु वा सरल होभर मापनहरूमा निर्भर हुनुभन्दा धेरै बढी सटीक छ।
आधुनिक ड्रोनहरूले पनि उडानको समयमा वर्तमान, भोल्टेज, थ्रोटल स्थिति, र मोटरको RPM जस्ता धेरै टेलिमेट्री लगहरू सिर्जना गर्छन्। यी लगहरूको विश्लेषण गर्दा वास्तविक अवस्थामा बिजुलीको खपत कसरी परिवर्तन हुन्छ भन्ने कुरामा अन्तर्दृष्टि प्राप्त हुन्छ। समयको साथ, संचालकहरू आफ्नो विशिष्ट ड्रोन, पेलोड, र मिशन प्रकारका लागि अनुकूलित भविष्यवाणी मॉडलहरू निर्माण गर्न सक्छन्। केही उन्नत प्रणालीहरूले ऐतिहासिक डाटा, वातावरणीय इनपुटहरू, र मिशन पैरामिटरहरूको आधारमा उडान समयको भविष्यवाणी गर्न मेशिन लर्निङ पनि प्रयोग गर्छन्।
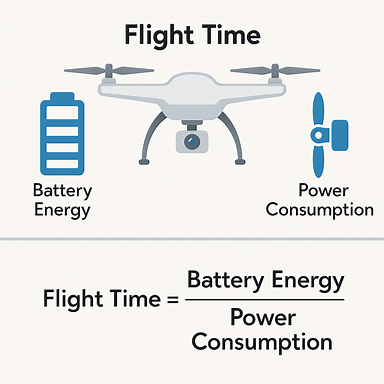
यी कारकहरूको जटिलताको बावजूद, मौलिक गणना अत्यन्तै सरल रहन्छ: उडान समय = प्रयोग योग्य ऊर्जा ÷ औसत शक्ति खपत। चुनौती यी दुई मानहरूलाई सही रूपमा निर्धारण गर्नुमा पर्छ। प्रयोग योग्य ऊर्जा ब्याट्रीको रासायनिक संरचना, तापमान, उमेर, र डिस्चार्ज सीमामा निर्भर गर्दछ। औसत शक्ति खपत वजन, वायुगतिकी, प्रणोदन क्षमता, मिशन गतिशीलता, र वातावरणीय अवस्थामा निर्भर गर्दछ। प्रत्येक कारकको प्रणालीगत विश्लेषण गरेर इन्जिनियरहरूले अत्यधिक विश्वसनीय स्थायित्व अनुमानहरू तयार गर्न सक्छन्।
पेशागत संचालनमा, सहनशक्ति अनुमान केवल एउटा प्राविधिक अभ्यास मात्र होइन, बरु यो सुरक्षा आवश्यकता पनि हो। नियामक ढाँचाहरूले प्रायः ड्रोनहरूलाई हावाको परिवर्तन वा आपातकालीन अवतरण जस्ता अप्रत्याशित घटनाहरूका लागि अतिरिक्त ऊर्जा संरक्षण गर्न आदेश दिन्छन्। सही उडान समय अनुमानले यी नियमहरूको पालना सुनिश्चित गर्दछ र आकाशमै बिजुली नष्ट हुने जोखिम घटाउँदछ। मानचित्रण, निरीक्षण र डिलिभरी जस्ता वाणिज्यिक प्रयोगहरूका लागि, सहनशक्तिले सीधा उत्पादकता र लागत दक्षतामा प्रभाव पार्दछ। केवल केही मिनेट थप समयसम्म हावामा रहन सक्ने ड्रोनले प्रति मिशनमा कतै धेरै क्षेत्र कवर गर्न वा अतिरिक्त कार्यहरू पूरा गर्न सक्छ।
अगाडि हेर्दा, ब्याट्री प्रविधिमा आएका अग्रगतिहरूले सहनशीलता गणनाहरूलाई पुनर्गठन गर्ने वाचा दिइरहेका छन्। लिथियम-सल्फर, सोलिड-स्टेट, र उच्च-सिलिकन एनोड ब्याट्रीहरूले वर्तमान लिथियम-पोलिमर (LiPo) र लिथियम-आयन (Li-ion) रासायनिक संरचनाहरूभन्दा उच्च ऊर्जा घनत्व प्रदान गर्छन्। हाइड्रोजन फ्युएल सेलहरू र संकर शक्ति प्रणालीहरूले विशेष गरी ठूला ड्रोनहरूका लागि लामो उडान समय प्राप्त गर्ने वैकल्पिक मार्गहरू प्रदान गर्छन्। जब यी प्रविधिहरू परिपक्व हुँदै जान्छन्, तब सहनशीलता गणना गर्न प्रयोग गरिने विधिहरू पनि विकसित हुनेछन्, तर ऊर्जा र शक्तिका मूलभूत सिद्धान्तहरू अझै पनि केन्द्रीय रहनेछन्।
सारांशमा, ड्रोनको उडान समय गणना गर्नका लागि ऊर्जाको भण्डारण, रूपान्तरण र खपतको व्यापक बुझाइ आवश्यक हुन्छ। यद्यपि मूल सूत्र सरल छ, वास्तविक संसारमा सहीताको लागि ब्याट्रीको व्यवहार, प्रोपल्शन क्षमता, मिशनको गतिशीलता, वातावरणीय प्रभावहरू र लोडका विशेषताहरूको सावधानीपूर्ण विचार गर्नु आवश्यक छ। सैद्धान्तिक मॉडलिङ्को साथै प्रायोगिक परीक्षण र डाटा विश्लेषण संयोजन गरेर इन्जिनियरहरूले ड्रोनको उडान समय विश्वसनीय रूपमा पूर्वानुमान गर्न सक्छन् र उनीहरूलाई उनीहरूको डिजाइन गरिएका विविध मिशनहरूका लागि अनुकूलित गर्न सक्छन्। सहनशक्ति (एन्ड्योरान्स) केवल एउटा विशिष्टता मात्र होइन; यो ड्रोनको समग्र डिजाइन गुणस्तर र सञ्चालन तैयारीको प्रतिबिम्ब हो।
