
Przewidywanie, jak długo dron może pozostawać w powietrzu, wydaje się prostą sprawą odczytania danych z karty technicznej producenta, jednak w praktyce jest to jedno z najbardziej złożonych obliczeń w dziedzinie bezzałogowych systemów lotniczych. Czas lotu nie jest stałą cechą, lecz wynikającą z interakcji czynników elektrycznych, mechanicznych, aerodynamicznych oraz środowiskowych. Inżynierowie, piloci i badacze opierają się na dokładnym szacowaniu czasu pracy urządzenia przy planowaniu misji, projektowaniu układów napędowych oraz ocenie technologii baterii. Zrozumienie sposobu obliczania czasu lotu drona wymaga więc holistycznego spojrzenia na drona jako na system przekształcania energii, a nie jako na zbiór odizolowanych komponentów.
W centrum tego obliczenia znajduje się zależność pomiędzy zmagazynowaną energią i zużycie energii bateria drona działa jako zbiornik energii chemicznej, która jest przekształcana w energię elektryczną, a następnie w mechaniczną siłę ciągu. Czas lotu zależy od szybkości, z jaką ten zbiornik się wyczerpuje. Choć podstawowa zasada przypomina model zużycia paliwa w tradycyjnych statkach powietrznych, napęd elektryczny wprowadza unikalne cechy, takie jak spadek napięcia, nieliniowe krzywe rozładowania oraz wydajność zależna od temperatury. Czynniki te czynią szacowanie czasu pracy zarówno technicznie interesującym, jak i operacyjnie krytycznym.
Aby rozpocząć, należy określić ilość energii dostępnej w baterii drona. Większość dronów konsumenckich i profesjonalnych wykorzystuje pakiety litowo-polimerowe (LiPo) lub litowo-jonowe (Li-ion), których pojemność podawana jest zwykle w miliamperogodzinach. Jednak sama pojemność nie określa ilości energii — konieczne jest również uwzględnienie napięcia. Całkowita energia baterii to iloczyn jej pojemności i napięcia znamionowego, wyrażony w watogodzinach. Ta konwersja jest niezbędna, ponieważ zużycie mocy mierzy się w watach, a czas pracy stanowi ostatecznie stosunek watogodzin do watów. Niemniej jednak nawet ta konwersja nie oddaje w pełni rzeczywistego zachowania baterii. Baterie rzadko dostarczają całej swojej deklarowanej pojemności ze względu na opór wewnętrzny, starzenie się oraz ograniczenia bezpieczeństwa dotyczące minimalnego napięcia. W rezultacie inżynierowie często operują pojęciem „energii użytecznej” — wartości obniżonej, która odzwierciedla praktyczne ograniczenia, a nie specyfikacje laboratoryjne.
Gdy zrozumie się dostępną energię, uwagę skupia się na zużyciu energii przez drona. W przypadku platform wielowirnikowych napęd stanowi przeważającą większość zużycia energii. Każdy silnik musi wytworzyć wystarczającą siłę ciągu, aby zrównoważyć ciężar drona, a moc potrzebna do wytworzenia tej siły rośnie szybko wraz ze wzrostem obciążenia. Związek między siłą ciągu a mocą określa aerodynamika śmigieł oraz sprawność silników, które obie zmieniają się wraz z prędkością obrotową. Dron unoszący się na komfortowym poziomie przepustnicy zużywa znacznie mniej mocy niż dron pracujący w pobliżu swojej maksymalnej zdolności generowania siły ciągu. Dlatego też dodanie ładunku – nawet niewielkiego – może wyraźnie skrócić czas lotu: przesuwa system napędowy do mniej wydajnego zakresu pracy.
Moc zawieszenia jest często wykorzystywana jako punkt odniesienia do szacowania czasu pracy, ponieważ reprezentuje stan ustalony. Pomiar prądu i napięcia podczas zawieszania pozwala bezpośrednio oszacować pobór mocy. Jednak rzeczywiste misje rzadko składają się wyłącznie z zawieszania. Lot w przód, wznoszenie się, hamowanie oraz manewrowanie obciążają silniki w sposób dynamiczny. Wiatr wprowadza dodatkową zmienność, czasem znacznie zwiększając pobór mocy. Dlatego obliczenia czasu pracy oparte wyłącznie na danych dotyczących zawieszania mają tendencję do nadmiernego optymizmu. Dokładniejsze prognozy wymagają zrozumienia, jak moc zmienia się w trakcie całego profilu misji.
Modelowanie oparte na misji dzieli lot na segmenty — start, wznoszenie, przelot na wysokości krzyżowej, schodzenie i lądowanie — oraz przypisuje każdemu z nich wartość mocy. Start i wznoszenie zwykle wymagają najwyższej mocy, podczas gdy podczas schodzenia może być ona bardzo niska. Moc potrzebna podczas przelotu na wysokości krzyżowej zależy od prędkości powietrznej, oporu aerodynamicznego oraz nośności translacyjnej. Drony wielowirnikowe wykazują umiarkowane obniżenie zapotrzebowania na moc podczas lotu przedniego, ponieważ przepływ powietrza przez śmigła staje się bardziej wydajny; jednak korzyść ta jest często niwelowana wzrostem oporu pochodzącego od kadłuba i ładunku. Poprzez przypisanie wag poszczególnym segmentom zgodnie z ich czasem trwania inżynierowie mogą obliczyć średnią wartość mocy, która lepiej odzwierciedla rzeczywiste warunki eksploatacji.
Warunki środowiskowe dodatkowo komplikują szacowanie czasu pracy. Gęstość powietrza maleje wraz ze wzrostem wysokości nad poziomem morza i temperatury, co obniża sprawność śmigieł i zmusza silniki do wirowania z wyższą prędkością w celu utrzymania ciągu. Zimna pogoda pogarsza wydajność baterii poprzez spowolnienie reakcji chemicznych, podczas gdy upał zwiększa obciążenie cieplne silników oraz regulatorów prędkości elektronicznych. Wiatr ma szczególnie duży wpływ: lot pod wiatr o dużej sile może podwoić zużycie mocy, podczas gdy lot z wiatrem może je zmniejszyć. Ponieważ zmienność warunków środowiskowych jest nieunikniona, obliczenia czasu pracy zwykle obejmują zapas bezpieczeństwa, aby zapewnić, że dron będzie w stanie wrócić do punktu startu nawet w przypadku pogorszenia się warunków.
Innym ważnym czynnikiem jest stan samego akumulatora. Z biegiem czasu powtarzające się cykle ładowania i rozładowania degradują wewnętrzną chemię akumulatora, zwiększając jego opór wewnętrzny i zmniejszając pojemność. Ta degradacja przejawia się spadkiem napięcia pod obciążeniem, co może prowadzić do wcześniejszego wyzwalania ostrzeżeń o niskim napięciu oraz skrócenia czasu lotu. Monitorowanie stanu akumulatora poprzez pomiary jego oporu wewnętrznego oraz liczbę cykli umożliwia operatorom przewidywanie spadku wydajności i wymianę akumulatorów jeszcze przed ich utratą niezawodności. W przypadku długoterminowego zarządzania flotą śledzenie starzenia się akumulatorów jest równie ważne jak obliczanie czasu lotu.
Charakterystyka ładunku wpływa również na czas pracy w sposób wykraczający poza sam jego masę. Wiele profesjonalnych ładunków — takich jak skanery LiDAR, kamery wielospektralne oraz moduły komunikacyjne — pobiera energię elektryczną z akumulatora drona. To dodatkowe zużycie energii należy uwzględnić razem z energią przeznaczoną na napęd przy szacowaniu całkowitego zużycia energii. Ładunek pobierający 20 watów może wydawać się nieistotny, ale w trakcie misji trwającej 30 minut zużywa on 10 watogodzin, co może skrócić czas lotu o kilka minut. Inżynierowie muszą zatem uwzględnić zarówno wpływ mechaniczny, jak i elektryczny ładunków przy obliczaniu czasu pracy.
Wybór śmigieł odgrywa zaskakująco dużą rolę w optymalizacji czasu lotu. Większe śmigła o mniejszym skoku są zwykle bardziej wydajne w generowaniu ciągu przy niskich prędkościach obrotowych, co czyni je idealnym wyborem dla dronów zaprojektowanych z myślą o maksymalnym czasie przebywania w powietrzu. Mniejsze śmigła o dużym skoku generują większy ciąg przy wysokich prędkościach, ale są mniej wydajne podczas zawisania. Dostosowanie charakterystyk śmigieł do wymagań danej misji może przynieść znaczne poprawy czasu lotu. Podobnie wartość KV silnika — czyli liczba obrotów na wolt — wpływa na wydajność. Silniki o niskiej wartości KV połączone z dużymi śmigłami zapewniają zazwyczaj lepszą wydajność pod względem czasu lotu, ponieważ działają wydajnie przy niższych obrotach.
Aby doprecyzować prognozy wytrzymałości, inżynierowie często polegają na testach empirycznych. Stacje pomiarowe ciągu dostarczają szczegółowych pomiarów ciągu, prądu, napięcia oraz sprawności dla konkretnych kombinacji silnika i śmigła. Dane te pozwalają inżynierom na opracowanie krzywych charakterystyk pracy, które odzwierciedlają zależność pomiędzy zużyciem mocy a generowanym ciągiem. Znając masę drona, można określić wymagany ciąg na poszczególne silniki i odczytać odpowiadającą mu wartość mocy z krzywej. Metoda ta jest znacznie dokładniejsza niż poleganie na specyfikacjach producenta lub prostych pomiarach zawieszenia w powietrzu.
Nowoczesne drony generują również obszerne dzienniki telemetryczne, które rejestrują prąd, napięcie, położenie przepustnicy oraz prędkość obrotową silników w trakcie całego lotu. Analiza tych dzienników pozwala uzyskać wgląd w sposób, w jaki zużycie mocy zmienia się w rzeczywistych warunkach. Z biegiem czasu operatorzy mogą tworzyć modele predykcyjne dostosowane do konkretnego drona, jego ładunku oraz typu misji. Niektóre zaawansowane systemy wykorzystują nawet uczenie maszynowe do prognozowania czasu lotu na podstawie danych historycznych, czynników środowiskowych oraz parametrów misji.
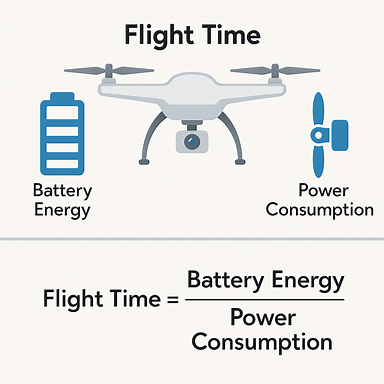
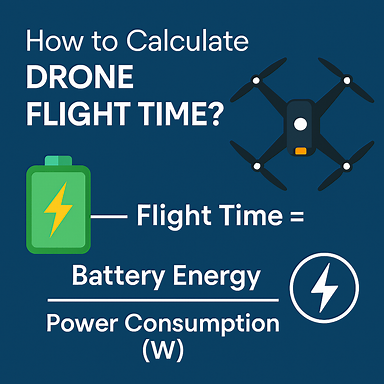
Mimo złożoności tych czynników podstawowe obliczenie pozostaje eleganckie i proste: czas lotu równa się energii użytecznej podzielonej przez średnią moc pobieraną. Wyzwaniem jest dokładne wyznaczenie tych dwóch wartości. Energia użyteczna zależy od chemii akumulatora, temperatury, starzenia się oraz limitów rozładowania. Średnia moc pobierana zależy od masy, aerodynamiki, sprawności napędu, dynamiki misji oraz warunków środowiskowych. Poprzez systematyczną analizę każdego z tych czynników inżynierowie mogą opracować bardzo wiarygodne szacunki czasu pracy.
W profesjonalnych operacjach szacowanie zasięgu nie jest jedynie ćwiczeniem technicznym, lecz wymogiem bezpieczeństwa. Ramy regulacyjne często nakazują, aby drony zachowywały zapas energii na wypadek nieprzewidzianych zdarzeń, takich jak zmiany wiatru lub lądowanie awaryjne. Dokładne przewidywanie czasu lotu zapewnia zgodność z tymi przepisami oraz zmniejsza ryzyko utraty zasilania w trakcie lotu. W zastosowaniach komercyjnych, takich jak tworzenie map, inspekcje czy dostawa towarów, zasięg wpływa bezpośrednio na produktywność i efektywność kosztową. Dron, który może pozostawać w powietrzu nawet kilka minut dłużej, może pokryć znacznie większy obszar lub wykonać dodatkowe zadania w ramach jednej misji.
Patrząc w przyszłość, postępy w technologii baterii obiecują przeformułować obliczenia czasu pracy. Baterie litowo-siarkowe, z elektrolitem stałym oraz z anodami o wysokiej zawartości krzemu oferują wyższą gęstość energii niż obecne chemie baterii LiPo i litowo-jonowych. Komórki paliwowe wodorowe oraz hybrydowe układy napędowe zapewniają alternatywne ścieżki do wydłużenia czasu lotu, szczególnie w przypadku dużych dronów. W miarę dojrzewania tych technologii metody obliczania czasu pracy będą się zmieniać, jednak podstawowe zasady związane z energią i mocą pozostaną centralne.
Podsumowując, obliczanie czasu lotu drona wymaga kompleksowego zrozumienia, w jaki sposób energia jest przechowywana, przekształcana i zużywana. Choć podstawowy wzór jest prosty, osiągnięcie rzeczywistej dokładności wymaga starannego uwzględnienia zachowania baterii, wydajności układu napędowego, dynamiki misji, wpływów środowiskowych oraz charakterystyk ładunku. Łącząc modelowanie teoretyczne z testami empirycznymi oraz analizą danych, inżynierowie mogą z dużą pewnością przewidywać czas lotu i zoptymalizować drony pod kątem różnorodnych misji, dla których zostały zaprojektowane. Wytrzymałość nie jest jedynie parametrem technicznym — stanowi ona odbicie ogólnej jakości konstrukcji drona oraz jego gotowości operacyjnej.
