
At bygge sin egen drone er et sjovt og praktisk projekt, der kombinerer færdigheder inden for elektronik, kredsløb og flyvekontrol. Denne artikel har til formål at hjælpe nybegyndere med at mestre de vigtigste principper for at bygge deres egne droner, samt henviser til kurser i dronemontage for at give en klar indlæringssti.
Liste over basisværktøjer
Før du går i gang med at samle din drone, skal du forberede følgende grundlæggende værktøjer:
Loddejern og lod — til lodning af elektroniske stik.
Hjælpeklemmer (valgfrit) — til at fastholde små dele under lodning.
Multimeter (valgfrit) — til måling af spænding og kontinuitet, hvilket hjælper med fejlfinding af kredsløbsproblemer.
Dobbelt-sided tape og Velcro — til sikring af elektroniske komponenter til rammen.
Kabelbånd — til ordning af ledninger og sikring af dele.
Krympeplast eller isolationstape — til beskyttelse af udsatte ledninger og forhindre kortslutning.
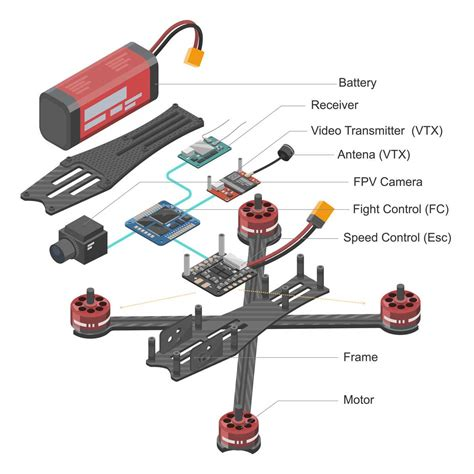
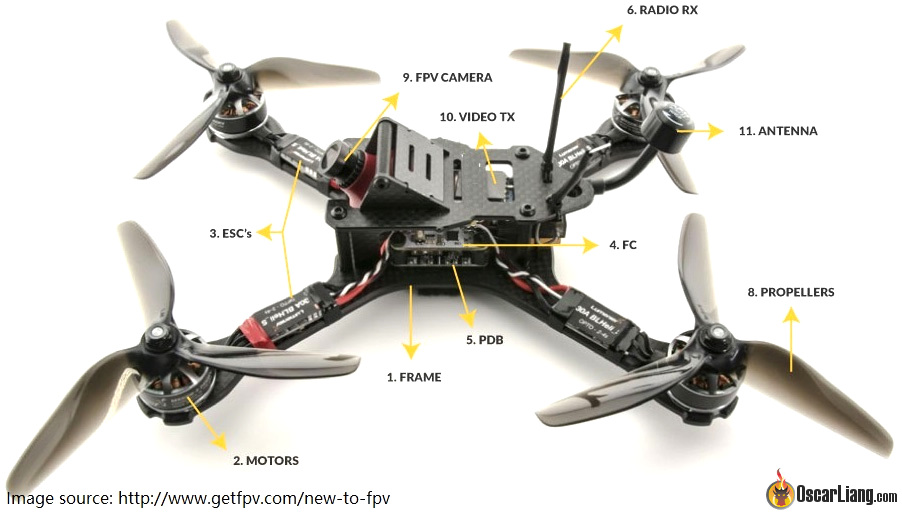
Grundlæggende dronekomponenter
Hver hjemmebygget drone består typisk af følgende kernekomponenter:
Ramme
Rammen er dronens skelet, som understøtter alle komponenter og bestemmer størrelsen og vægten af flyet. Alibaba Cloud Developer Community
Motorer
Kuleløse motorer er almindeligt anvendt i droner. De er mere holdbare og effektive end kulede motorer. KV-værdien (hastighed per volt) er et vigtigt valgskriterium.
Propeller
Propellerstørrelse og -stigning påvirker trækkraft og flydejagt, så valget skal være tilpasset motoren.
Elektronisk Hastighedsregulator (ESC)
ESC'en styrer motorens hastighed baseret på signaler fra flystyringen og er en afgørende bro mellem motoren og strømforsyningen.
Lithium-Polymer-batteri (LiPo)
LiPo-batterier er bredt anvendt i droner på grund af deres høje energitæthed. Valget bør tage hensyn til spændingsklassificeringen (S) og kapaciteten (mAh).
Strømfordelingskort (PDB)
PDB fordeler strøm fra batterien til alle ESC'er og øvrige elektroniske komponenter og udgør dermed den centrale knude i strømsystemet.
Flyvecontroller
Flystyreenheden er dronens "hjerne", ansvarlig for modtagelse af signaler fra sensorer og fjernbetjening samt for opretholdelse af flyvestabilitet.
Gps-modul
Droner med GPS-funktionalitet kan opnå mere stabil positionering og intelligente flyvetilstande.
Fjernbetjening og modtager
Manuel kontrol opnås via fjernbetjeningen. Antallet af kanaler bestemmer kontrollens præcision og funktionalitet.
Telemetrimodul
Telemetrimodulen transmitterer dronens flyvedata til en jordbaseret kontrolstation eller visningsenhed i realtid.
Hvordan man vælger de rigtige komponenter
Forståelse af trækkraft-til-vægt-forholdet
Trækkraft-til-vægt-forholdet er en kernepræstationsindikator for droner. Det anbefales generelt, at den samlede trækkraft er mindst dobbelt så stor som den samlede vægt for mere stabil flyvning.
Estimering af trækkraft-til-vægt-forhold og samlet vægt
Start med at estimere den samlede vægt af rammen og alle komponenter. Brug derefter trækkraftdataene for kombinationen af motor og propeller for at sikre, at designet opfylder det ønskede trækkraft-til-vægt-forhold.
Brug af producentens trækkraftdiagrammer til valg
De fleste motortillverkere leverer thrust-testdiagrammer, som kan bruges til at vælge den passende komponentkombination til din model.
Trin i dronedokning
Lodning og installation af komponenter
Lod motorerne, ESC og batteritilslutninger i den angivne rækkefølge, og fastgør dem til rammen.
Placering og test af motorer
Ifølge dronens design (f.eks. X-type eller krydstype) skal motorerne monteres korrekt, og motorens rotation og respons skal testes uden propeller monteret.
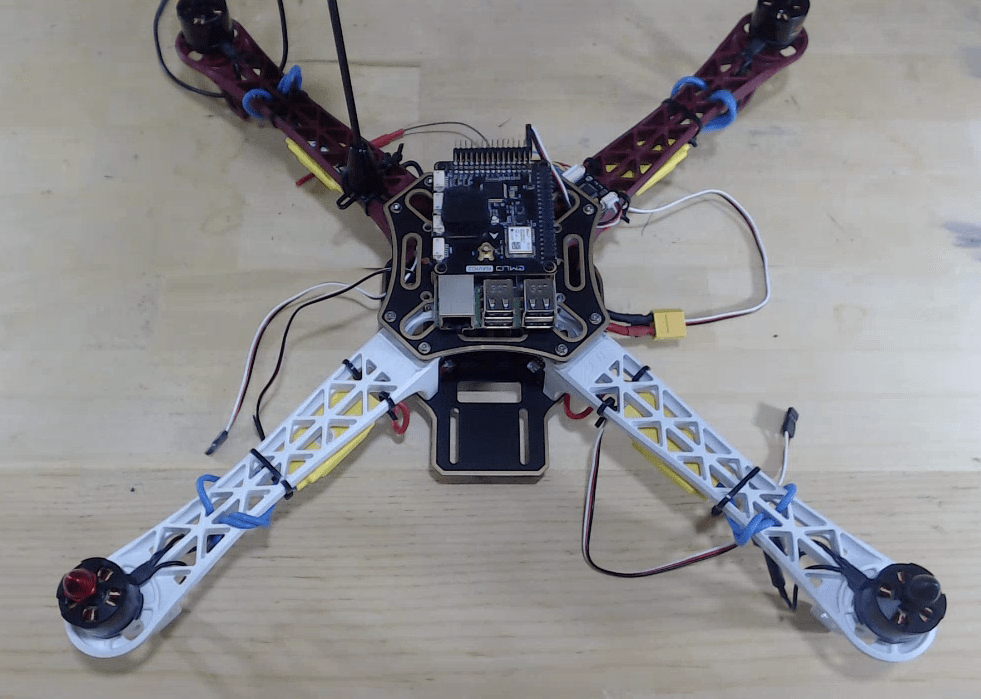
Fastgørelse af komponenter
Brug dobbeltsidet tape, Velcro og kablerør til at fastgøre flight controller, ESC, GPS mv. på passende positioner på rammen, og hold kablerne pænt ordnet.
Afsluttende kalibrering og testflyvning
Efter montering skal flight controller og ESC kalibreres, fjernbetjeningens kanaler kontrolleres, og derefter udføres den første svævetest.
Anbefalede supplerende ressourcer
For yderligere at forbedre dine færdigheder kan du henvis til disse avancerede ressourcer:
DIY Drone Byggekursus — Systematisk læring af komponentvalg, samling og fejlfinding
