
Ձեր սեփական անօդ մարդատարը կառուցելը զվարճալի և գործնական նախագիծ է, որն ամփոփում է էլեկտրոնիկայի, շղթաների և թռիչքի վերահսկողության հմտությունները: Այս հոդվածի նպատակն է օգնել սկսնակներին տիրապետել անհրաժեշտ հիմնարար գիտելիքներին՝ իրենց սեփական անօդ մարդատարները կառուցելու համար, ինչպես նաև անօդ մարդատարների կառուցման դասընթացներին հղում կատարելով՝ ապահովելով հստակ ուսուցման ճանապարհ:
Հիմնարար գործիքների ցանկ
Անօդ մարդատարի հավաքմանն սկսելուց առաջ պատրաստեք հետևյալ հիմնարար գործիքները.
Փորձանոթ և փորձանոթի նյութ — էլեկտրոնային միացումների փորձանոթման համար:
Օժանդակ կցանքներ (ըստ ցանկության) — փորձանոթման ընթացքում փոքր մասերը ամրացնելու համար:
Մուլտիմետր (ըստ ցանկության) — լարման և անընդհատությունը չափելու համար, օգնում է կարգավորել շղթրի խնդիրները:
Երկկողմանի շեյք և Վելկրո — էլեկտրոնային բաղադրատարրերը շրջանակին ամրացնելու համար:
Կաբելային կապեր — սարքերը կարգավորելու և մասերը ամրացնելու համար:
Տաքության կրճատման խողովակ կամ էլեկտրական շեյք — հանիրավի սարքերը պաշտպանելու և կարճ միացումը կանխարարելու համար:
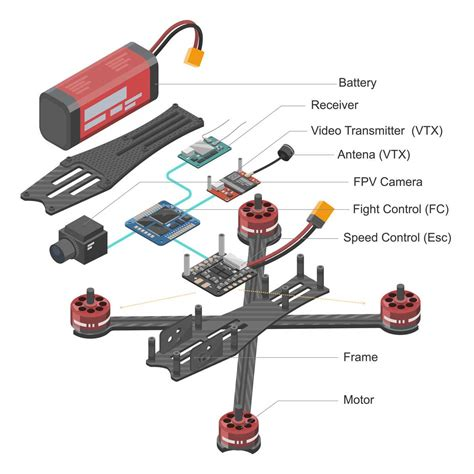
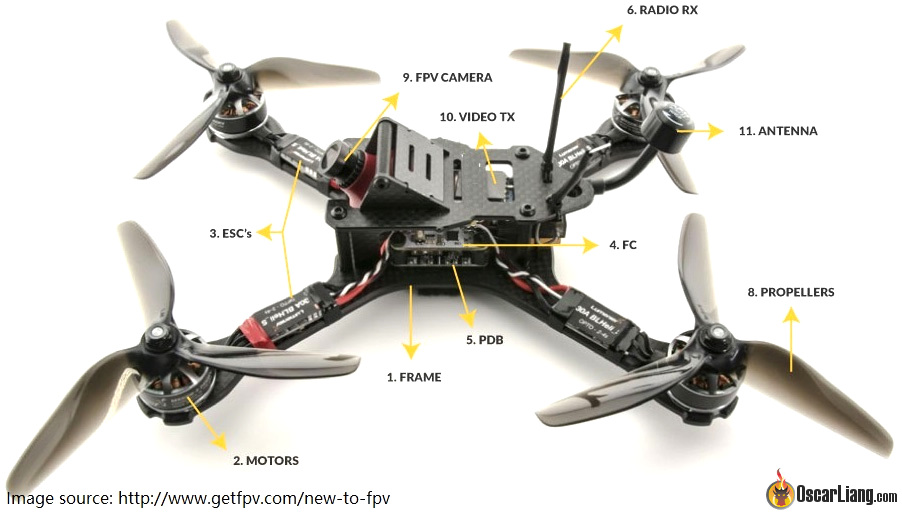
Հիմնարար անօդաչու բաղադրատարրեր
Յուրաքանչյուր տնական անօդաչուն սովորաբար կազմված է հետևյալ հիմնարար բաղադրատարրերից.
Հաղորդակցության
Շրջանակը անօդաչուի կմախքն է, որը աջակցում է բոլոր բաղադրատարրերին և որոշում է իրավական չափսը և քաշը: Alibaba Cloud Developer Community
Մոտորներ
Բրուշլես շարժիչները հաճախ օգտագործվում են անօդաչու թռչող սարքերում։ Նրանք ավելի մաշվածության դիմացկուն են և ավելի արդյունավետ, քան բրուշավոր շարժիչները։ KV արժեքը (արագությունը լցափոխարկելի լարման վրա) կարևոր ընտրության մետրիկա է։
Ինքնաթիռի պտուտակներ
Պտուտակի չափը և թեքությունը ազդում են թրթռման և թռիչքի կատարման վրա, ուստի ընտրությունը պետք է հարմարեցված լինի շարժիչին։
Էլեկտրոնային արագության կառավարիչ (ESC)
ESC-ն կառավարում է շարժիչի արագությունը՝ հիմնվելով թռիչքի կառավարման հրահանգների վրա և կարևոր կամուրջ է հանդիսանում՝ միացնելով շարժիչն ու սնուցման աղբյուրը։
Լիթիում-պոլիմերային մարտկոց (LiPo)
LiPo մարտկոցները լայնորեն օգտագործվում են անօդաչու թռչող սարքերում՝ իրենց բարձր էներգախտության շնորհիվ։ Ընտրությունը պետք է հաշվի առնի լարման աստիճանը (S) և տարողությունը (մԱ/ժ)։
Սնուցման բաշխման տախտակ (PDB)
PDB-ն մարտկոցի էներգիան բաշխում է բոլոր ESC-ներին և այլ էլեկտրոնային բաղադրիչներին, դարձնելով այն էներգահամակարգի հիմնական հանգույց։
Թռիչքի կառավարիչ
Թռիչքի կառավարիչը թռչող սարքի «ուղեղն» է, որը պատասխանատու է սենսորներից և հեռակա կառավարման սարքից ստացված սիգնալների համար և թռիչքի կայունության պահպանման համար:
GPS մոդուլ
GPS ֆունկցիոնալությամբ թռչող սարքերը կարող են հասնել ավելի կայուն դիրքավորման և ինտելեկտուալ թռիչքի ռեժիմների:
Հեռակա կառավարման սարք և ընդունիչ
Կառավարումը կատարվում է հեռակա կառավարման սարքի միջոցով: Կանալների քանակը որոշում է կառավարման ճշգրտությունն ու ֆունկցիոնալությունը:
Տելեմետրիայի մոդուլ
Տելեմետրիայի մոդուլը իրական ժամանակում թռչող սարքի թռիչքի տվյալները փոխանցում է հողային կառավարման կայան կամ ցուցադրման սարք:
Ինչպես ընտրել ճիշտ կոմպոնենտները
Թրթիռ-քաշի հարաբերակցության հասկացությունը
Թրթիռ-քաշի հարաբերակցությունը թռչող սարքերի հիմնական կարողությունն է: Ընդհանուր առմամբ խորհուրդ է տրվում, որ ընդհանուր թրթիռը առնվազն երկու անգամ գերազանցի ընդհանուր քաշը՝ ավելի կայուն թռիչքի համար:
Թրթռման և քաշի հարաբերակցության և ընդհանուր քաշի գնահատում
Նախ գնահատեք շրջանակի և բոլոր բաղադրիչների ընդհանուր քաշը: Ապա ծանոթացեք շարժիչի և պտուտակի համադրության թրթռման տվյալներին՝ համոզվելու համար, որ կոնստրուկցիան համապատասխանում է թրթռման և քաշի նպատակային հարաբերակցությանը:
Արտադրողի թրթռման գրաֆիկների օգտագործում ընտրության համար
Շատ շարժիչների արտադրողներ տրամադրում են թրթռման փորձարկման գրաֆիկներ, որոնք կարող են օգտագործվել ձեր մոդելի համար ճիշտ բաղադրիչների համադրությունը ընտրելու համար:
Անօդաչու թռչող սարքի հավաքման քայլեր
Բաղադրիչների փողակցում և տեղադրում
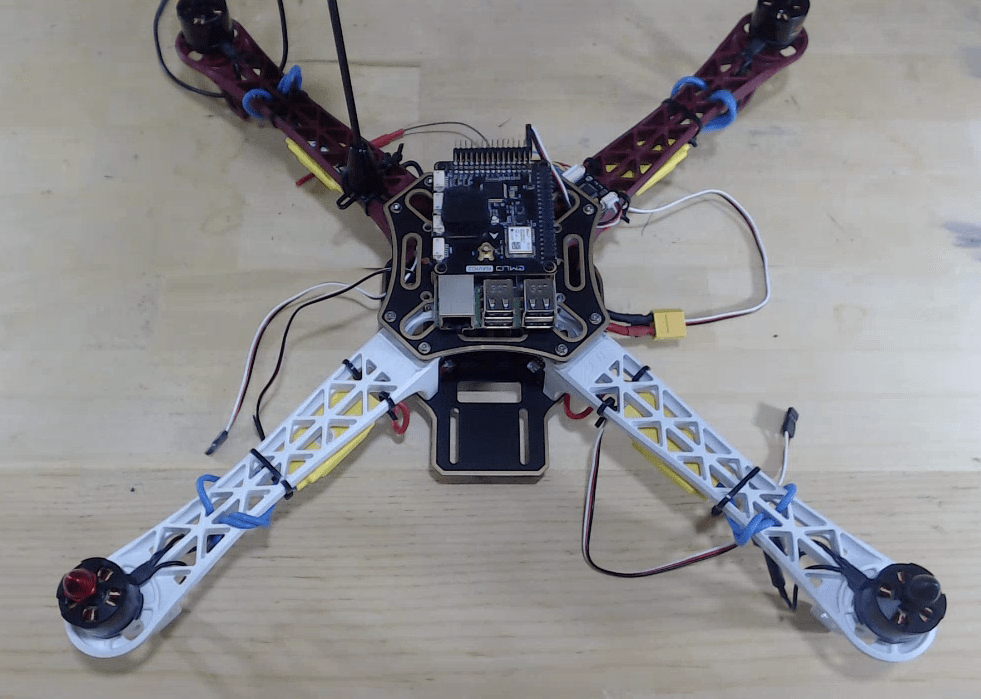
Փողակցեք շարժիչները, ESC-ն և մատակարարման կապարները նախատեսված հաջորդականությամբ և ամրացրեք դրանք շրջանակին:
Շարժիչների տեղադրում և փորձարկում
Ըստ անօդաչու թռչող սարքի կոնստրուկցիայի (օրինակ՝ X-տիպ կամ խաչաձև տիպ), ճիշտ տեղադրեք շարժիչները և փորձարկեք շարժիչի պտույտն ու պատասխանատվությունը՝ առանց պտուտակներ տեղադրած լինելու:
Բաղադրիչների ամրացում
Օդաթռիչքի կառավարման սարքը, Էլեկտրոնային շարժաբերի կառավարիչը (ESC), GPS և մյուս մասերը շրջանակի հարմար դիրքերում ամրացնելու համար օգտագործեք երկկողմանի փայտագործական շերտ, Վելկրո և լցակալ պարաններ, պահելով միացումները կարգապահ։
Վերջնական կալիբրացում և փորձարկման թռիչք
Տեղադրումից հետո կատարեք օդաթռիչքի կառավարման սարքի և Էլեկտրոնային շարժաբերի կառավարչի (ESC) կալիբրացում, ստուգեք հեռակառավարման ալիքները, ապա կատարեք սկզբնական լողացման փորձարկում։
Խորհուրդ տրվող լրացուցիչ ռեսուրսներ
Ձեր հմտությունները բարելավելու համար կարող եք ծանոթանալ այս առաջադեմ ռեսուրսներին.
Ինքնուրույն Անօդաչու Մեքենայի Կառուցման Դասընթաց՝ Բաղադրիչների Ընտրության, Կառուցման և Խափանումների Վերացման Համակարգված Ուսուցում
