
Drooni ise ehitamine on meelelahutuslik ja praktiline projekt, mis ühendab elektroonikavaldkonna, ahelate ja lennureguleerimise oskusi. Selle artikli eesmärk on aidata algajatel omandada olulised alused, mida vaja on nende enda droonide ehitamiseks, samuti viitab see droonide ehitamise kursustele, et pakkuda selget õppeplaani.
Põhitööriistade loetelu
Enne drooni monteerimise alustamist valmistuge ette järgmised põhitööriistad:
Paigutussild ja paigutusmass — elektrooniliste ühenduste paigutamiseks.
Abiklambid (valikuline) — väikeste detailide kinnitamiseks paigutamise ajal.
Multimeeter (valikuline) — pinge ja läbitohetuse mõõtmiseks, aitab veapronksida ahelate probleeme.
Topeltkleepuv tape ja Velcro — elektrokomponentide raamile kinnitamiseks.
Kaabelriist — juhtmete korraldamiseks ja osade kinnitamiseks.
Kuumutustahmuv toru või isoleerimislint — avatud juhtmete kaitseks ja lühisvoolude ennetamiseks.
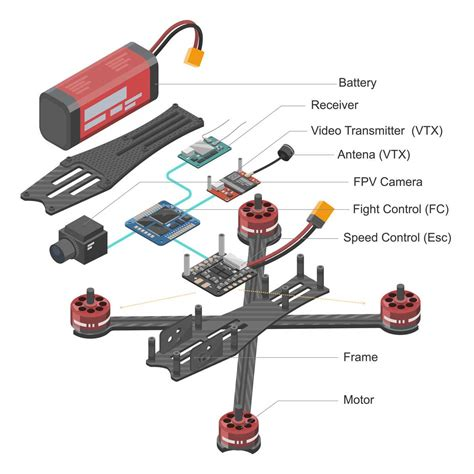
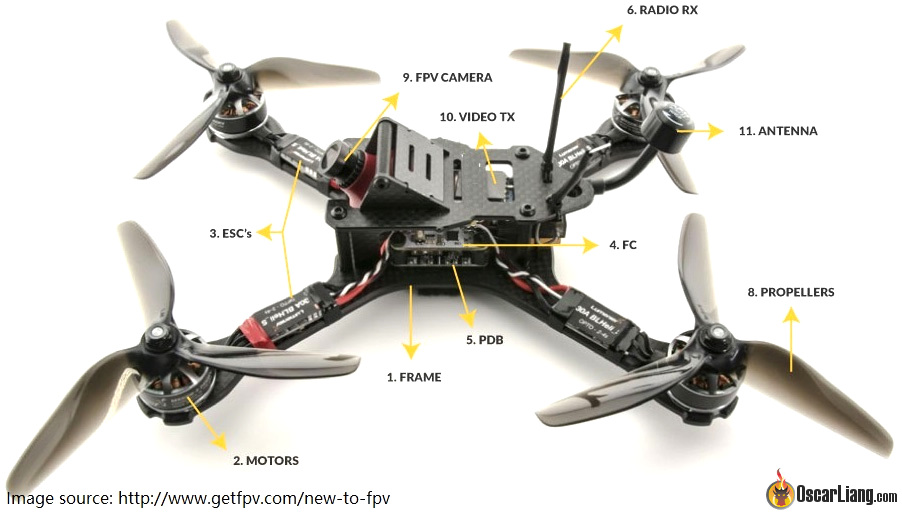
Põhilised drooni komponendid
Iga kodused valmistatud droon koosneb tavaliselt järgmistest põhikomponentidest:
Raam
Raam on drooni luukere, mis toetab kõiki komponente ning määrab lennukite suuruse ja kaalu. Alibaba Cloud Developer Community
Mootorid
Bürstideta mootorid on dronides levinud. Need on kestvamad ja tõhusamad kui bürstiga mootorid. KV väärtus (kiirus volt kohta) on oluline valikumeetrika.
Propellerid
Propelleri suurus ja tõukejõud mõjutavad tõukejõudu ja lenduomadusi, seega tuleb valik sobitada mootoriga.
Elektrooniline kiirusejuhtimisseade (ESC)
ESC reguleerib mootori pöördeid lennukontrolli signaalide põhjal ning on oluline ühendusmootor ja toiteallika vahel.
Liitium polümeer akud (LiPo)
LiPo akud on dronides laialdaselt kasutusel nende kõrge energiatiheduse tõttu. Valikul tuleb arvestada pinge klassifikatsiooni (S) ja mahuga (mAh).
Voolujuhtimisplaat (PDB)
PDB jaotab aku pinget kõigile ESC-dele ja teistele elektroonikakomponentidele, moodustades võimsussüsteemi tuumaelemendi.
Lennukontroller
Lennujuhtimismoodul on dronni "aju", mis vastutab andurite ja kaugjuhtimispulti signaalide vastuvõtmise eest ning lendu stabiilsuse tagamise eest.
GPS-moodul
GPS-funktsiooniga droonid suudavad saavutada stabiilsema positsioneerimise ja nutikama lennurežiimi.
Kaugjuhtimispult ja vastuvõtja
Käsijuhtimine toimub kaugjuhtimispulti kaudu. Kanalite arv määrab juhtimise täpsuse ja funktsionaalsuse.
Telemetria moodul
Telemetria moodul edastab dronni lennuandmeid reaalajas maapinnal asuvasse juhtimisjaamas või kuvaseadmesse.
Kuidas valida õiged komponendid
Tõmbejõu ja kaalu suhte mõistmine
Tõmbejõu ja kaalu suhe on dronni põhiline jõudluskriteerium. Soovitatakse, et kogutõmbejõud oleks vähemalt kaks korda suurem kui kogukaal, et tagada stabiilsem lend.
Tõmbejõu ja kaalu suhte ning üldkaalu hinnang
Esiteks hinnake raami ja kõigi komponentide kogukaalu. Seejärel tutvuge mootori ja propelleri kombinatsiooni tõmbeandmetega, et veenduda, et disain vastab sihtkohale tõmbe-kaalu suhte.
Tootja tõmbeandmete tabelite kasutamine valikul
Enamik mootorite tootjaid pakuvad tõmbe testimise andmetabeleid, mida saab kasutada sobiva komponendikombinatsiooni valimiseks teie mudelile.
Dronei monteerimise sammud
Komponentide lõimimine ja paigaldamine
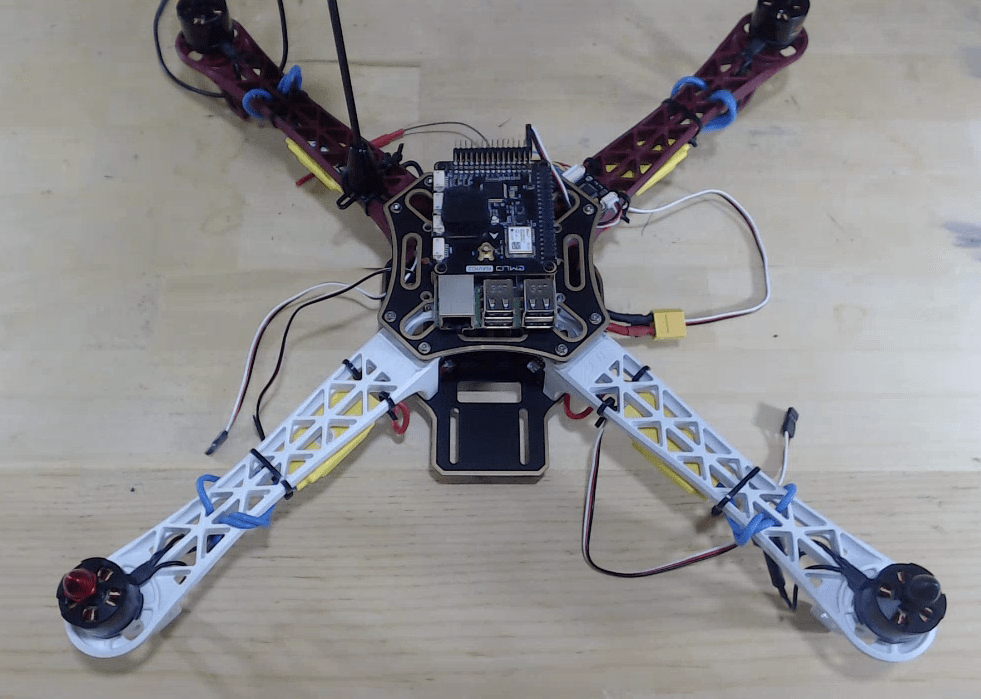
Lõimige mootorid, ESC ja aku ühendused disainijärjekorras ning kinnitage need raamile.
Mootorite paigutus ja testimine
Dronei disaini järgi (nt X-tüüp või risttüüp) paigaldage mootorid õigesti ja testige mootorite pöörlemist ja reageerimist ilma propelleriteta.
Komponentide kindlaks tegemine
Kasutage topeltkleebitape, Velcro ja kaablipingeid lennukontrolleri, ESC, GPS jms kinnitamiseks sobivatesse kohtadesse raamile, hoides juhtmed korralikult.
Lõplik kalibreerimine ja proovilend
Pärast paigaldamist kalibreerige lendjuhtimisseade ja ESC, kontrollige kaugjuhtimise kanalid ning tehke esimene lennutesti.
Soovitatavad täiendusallikad
Oskuste edasiseks arendamiseks võite kasutada järgmisi edasijõudnud allikaid:
DIY Drooniehitamise kursus — Komponentide valiku, kokkupaneku ja veaparandmise süstemaatne õpe
